PID控制器是一种广泛用于各种工业控制场合的控制器,它结构简单,可以根据工程经验整定参数Kp,Ki,Kd. 虽然现在控制专家提出了很多智能的控制算法,比如神经网络,模糊控制等,但是PID仍然被广泛使用。常见的PID控制器有位置PID控制器,增量PID控制器。两个PID控制器各有自己的优点,需要根据具体的场合来使用。pid控制器的结构框图为:

连续形式公式如下:

为了方便软件编程实现,一般转换成离散形式,即用连加代替积分,有差分代替微分,

离散型PID公式:

理解PID(零)——什么是PID
news2026/2/13 5:06:47
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/2203327.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

视频怎么转gif动图?5个简单转换方法快来学(详细教程)
相信大家在社交平台上会经常看到一些有趣的gif动图表情包,有些小伙伴就会问:这些GIF动图是如何制作的呢?一般GIF动图表情包可以用视频来制作,今天小编就来给大家分享几个视频转成GIF动图的方法,相信通过以下的几个方法…

文献阅读CONCH模型--相关知识点罗列
文章链接:A visual-language foundation model for computational pathology | Nature MedicineThe accelerated adoption of digital pathology and advances in deep learning have enabled the development of robust models for various pathology tasks across…

【可答疑】基于51单片机的智能家居系统(含仿真、代码、报告、演示视频等)
✨哈喽大家好,这里是每天一杯冰美式oh,985电子本硕,大厂嵌入式在职0.3年,业余时间做做单片机小项目,有需要也可以提供就业指导(免费)~
🐱🐉这是51单片机毕业设计100篇…

商标恶意维权形式及应对策略
在商业领域,商标恶意维权的现象时有出现,给正常的市场秩序和企业经营带来了不良影响。以下将介绍其常见形式及应对方法。 一、商标恶意维权的形式1、囤积商标后恶意诉讼。一些人或企业大量注册与知名品牌相似或具有一定通用性的商标,并非用于…

留学生毕业论文设计问卷questionnaire的基本步骤
在上一期内容中,小编介绍了留学毕业论文的定量研究和相关的问卷设计。然而在一些研究中,定量研究和问卷数据并不能满足我们的研究需求。这种情况下,我们可以采取其他的数据收集方式,例如observation,case study和inter…

软件设计之SSM(11)
软件设计之SSM(11)
路线图推荐: 【Java学习路线-极速版】【Java架构师技术图谱】 尚硅谷新版SSM框架全套视频教程,Spring6SpringBoot3最新SSM企业级开发 资料可以去尚硅谷官网免费领取
学习内容:
Springboot
配置文件整合SpringMVC整合Dr…

【学术会议征稿】第十届能源资源与环境工程研究进展国际学术会议(ICAESEE 2024)
第十届能源资源与环境工程研究进展国际学术会议(ICAESEE 2024)
2024 10th International Conference on Advances in Energy Resources and Environment
第十届能源资源与环境工程研究进展国际学术会议(ICAESEE 2024)定于2024年…

拓扑排序与入度为0的结点算法解析及实现
拓扑排序与入度为0的结点算法解析及实现 算法思想时间复杂度分析伪代码C语言实现环路检测结论拓扑排序是一种用于有向无环图(DAG, Directed Acyclic Graph)的重要操作,它可以对图中的结点进行排序,使得对于每一条有向边 (u, v),顶点 u 在排序中都出现在顶点 v 之前。本文介…

Qt和c++面试集合
目录
Qt面试
什么是信号(Signal)和槽(Slot)?
什么是Meta-Object系统?
什么是Qt的MVC模式?
1. QT中connect函数的第五个参数是什么?有什么作用?
3. 在QT中ÿ…

ROS2官方文档(2024-10-10最新版)
ROS 2 Documentation — ROS 2 Documentation: Jazzy documentation (armfun.cn)
ROS 2 文档 — ROS 2 文档:Humble 文档 (armfun.cn)
翻译中文方法:使用windows11自带Edge浏览器打开,右上角点击翻译为中文

pytest框架之fixture测试夹具详解
前言
大家下午好呀,今天呢来和大家唠唠pytest中的fixtures夹具的详解,废话就不多说了咱们直接进入主题哈。 一、fixture的优势
pytest框架的fixture测试夹具就相当于unittest框架的setup、teardown,但相对之下它的功能更加强大和灵活。 …

DBMS-3.3 SQL(3)——DML的INSERT、UPDATE、DELETE空值的处理DCL
本文章的素材与知识来自李国良老师和王珊老师。 DML——INSERT、UPDATE、DELETE
一. INSERT
1.语法 (1)INTO子句 (2)VALUES子句 (3)示例 2.插入子查询 若插入的是子查询则不需要VALUES子句
二. UPDATE …

大数据法律监督模型平台实现常态化法律监督
大数据法律监督模型平台充分挖掘大数据价值,利用大数据关联、碰撞、比对,从海量数据中自动筛查出法律监督线索,推送给检察官,有利于提升法律监督质效。 大数据法律监督模型平台建设目标 1、提升监察机关主动监督、精准…

基于DCGM+Prometheus+Grafana的GPU监控方案
目录 前言一、指标导出器1、DCGM:获取远程节点的信息 2、 DCGM-Exporter收集多节点信息更改收集指标 二、 Prometheus - From metrics to insight修改配置文件查看收集结果 三、Grafana仪表板展示导入数据源创建仪表板更多仪表板 前言
基于DCGM(NVIDIA …
![[SAP ABAP] LIKE TABLE OF](https://i-blog.csdnimg.cn/direct/b4bcb20aaaf84a34bc0ea2f39a6643dc.png)
[SAP ABAP] LIKE TABLE OF
LIKE TABLE OF语句是用来参照结构体(工作区)对象定义内表数据类型的语句
在SAP ABAP中有标准表,排序表和哈希表三种内表数据类型
*定义标准表
DATA: <ty_tab_standard_name> LIKE [STANDARD] TABLE OF <dtype> [WITH NON-UNIQUE KEY <k1 k2 ... kn…

Python自动给课本文字标注拼音
环境: Ubuntu20.04,ubuntu20.04自带python版本 3.8.10,pip的版本是 20.0.2
pip install pypinyin # 安装失败,检查更新pip确保pip是最新版本:
pip install --upgrade pip
检查是否安装成功
pip show pypinyin
pinyin…

【电路笔记】-求和运算放大器
求和运算放大器 文章目录 求和运算放大器1、概述2、反相求和放大器3、同相求和放大器4、减法放大器5、应用5.1 音频混合器5.2 数模转换器 (DAC)6、总结1、概述
在我们之前有关运算放大器的大部分文章中,仅将一个输入应用于反相或非反相运算放大器的输入。在本文中,将讨论一种…
Python从入门到高手6.1节-字符串的定义与编码
目录
6.1.1 理解字符串
6.1.2 字符串的类型名
6.1.3 字符的数字编码
5.1.4 常用的字符编码
6.1.5 字符串的默认编码
6.1.6 字符串的编码与解码
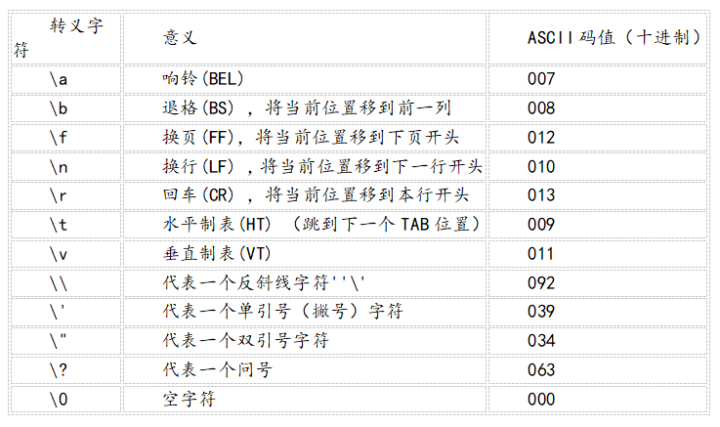
6.1.7 转义字符详解
6.1.8 对字符串进行迭代
6.1.9 大神薯条老师 6.1.1 理解字符串
在Python中使用英文引号括住的都是字符…
CAS存在的问题及在Java中的解决方式
CAS 介绍 CAS 可以保证对共享变量操作的原子性 CAS全称Compare And Swap,比较与交换,是乐观锁的主要实现方式。CAS在不使用锁的情况下实现多线程之间的变量同步。ReentrantLock内部的AQS和原子类内部都使用了CAS。 CAS算法涉及到三个操作数:需…