一、说明
在机器学习系列的第 16 节,我们重点介绍了提高 K 最近邻 (KNN) 算法的效率,这是一种广泛用于分类和回归任务的方法。虽然 KNN 简单有效,但对于大型数据集来说,其计算成本可能会令人望而却步。为了解决这个问题,我们引入了两种高级数据结构:KD 树和球树,它们显着提高了 KNN 搜索的速度。
二、了解 KNN 的挑战
KNN 的工作原理是查找离查询点最近的数据点,并根据其标签进行预测。但是,简单方法需要计算从查询点到数据集中每个点的距离,导致每个查询的时间复杂度为 O(n),其中 n 是数据点的数量。对于大型数据集,这可能非常慢,尤其是在高维空间中。
三、KD 树:高效的空间分区
KD 树(K 维树)是一种二叉树数据结构,它以递归方式将数据空间划分为超矩形。以下是他们改进 KNN 的方法:
1. 构建:根据一个维度的中位数,在每个节点将数据集分为两半,在每个级别的维度之间循环。
2. 搜索:不是将查询点与每个数据点进行比较,而是将搜索限制在树的特定分支上,从而显著减少了距离计算的数量。
优势:KD 树对于低维到中高维数据(通常最多 20 维)非常有效。
限制:由于维度的诅咒,性能会随着维度的增加而降低。
3.1 球树:更适合高尺寸
球树解决了 KD 树的一些限制,尤其是在更高的维度中。它们使用不同的分区策略:
1. 构造:数据空间被划分为嵌套的超球体(球),每个超球体都包含一个数据点的子集。
2. 搜索:与 KD 树一样,球树通过仅关注相关区域来修剪大部分搜索空间。
优势:球树在高维空间中的性能优于 KD 树,并且可以更有效地处理非均匀数据分布。
限制:它们通常比 KD 树更复杂地实现和维护。
3.2 在实践中实现 KD 树和球树
KD 树和球树在流行的机器学习库(如 scikit-learn)中都受支持。以下是如何在 scikit-learn 中使用这些结构实现 KNN 的简短示例:
from sklearn.neighbors import KNeighborsClassifier # Using KD-tree knn_kd = KNeighborsClassifier(algorithm='kd_tree') knn_kd.fit(X_train, y_train) predictions_kd = knn_kd.predict(X_test) # Using Ball Tree knn_ball = KNeighborsClassifier(algorithm='ball_tree') knn_ball.fit(X_train, y_train) predictions_ball = knn_ball.predict(X_test)
四、KD树的原理
4.1 什么是K维树?
KD 树(也称为 K 维树)是一种二叉搜索树,其中每个节点中的数据是空间中的 K 维点。简而言之,它是一种空间分区(详情如下)数据结构,用于组织 K 维空间中的点。KD 树中的非叶节点将空间分为两部分,称为半空间。该空间左侧的点由该节点的左子树表示,空间右侧的点由右子树表示。我们很快就会解释如何划分空间和形成树的概念。为简单起见,让我们通过一个例子来理解 2-D 树。根将有一个 x 对齐的平面,根的子节点都将具有 y 对齐的平面,根的孙子节点都将具有 x 对齐的平面,根的曾孙节点都将具有 y 对齐的平面,依此类推。
概括:我们将平面编号为 0、1、2、…(K – 1)。从上面的例子中可以清楚地看出,深度为 D 的点(节点)将具有 A 对齐平面,其中 A 的计算方式为:A = D mod K
如何确定一个点位于左子树还是右子树?如果根节点在平面 A 中对齐,则左子树将包含该平面中坐标小于根节点的所有点。同样,右子树将包含该平面中坐标大于或等于根节点的所有点。
创建二维树:考虑二维平面中的以下点:(3, 6)、(17, 15)、(13, 15)、(6, 12)、(9, 1)、(2, 7)、(10, 19)
- 插入(3,6):由于树为空,因此将其作为根节点。
- 插入(17,15):将其与根节点点进行比较。由于根节点是 X 对齐的,因此将比较 X 坐标值以确定它位于右子树还是左子树中。该点将 Y 对齐。
- 插入 (13, 15):此点的 X 值大于根节点中点的 X 值。因此,这将位于 (3, 6) 的右子树中。再次将此点的 Y 值与点 (17, 15) 的 Y 值进行比较(为什么?)。由于它们相等,因此该点将位于 (17, 15) 的右子树中。该点将 X 对齐。
- 插入 (6, 12):此点的 X 值大于根节点中点的 X 值。因此,这将位于 (3, 6) 的右子树中。再次将此点的 Y 值与点 (17, 15) 的 Y 值进行比较(为什么?)。由于 12 < 15,因此此点将位于 (17, 15) 的左子树中。此点将 X 对齐。
- 插入(9, 1):同样,该点将位于(6, 12)的右边。
- 插入(2, 7):同样,该点将位于(3, 6)的左边。
- 插入(10,19):同样,该点将位于(13,15)的左边。

空间是如何划分的?
所有 7 个点都将在 XY 平面上绘制如下:
- 点(3, 6)将空间分成两部分:画线 X = 3。
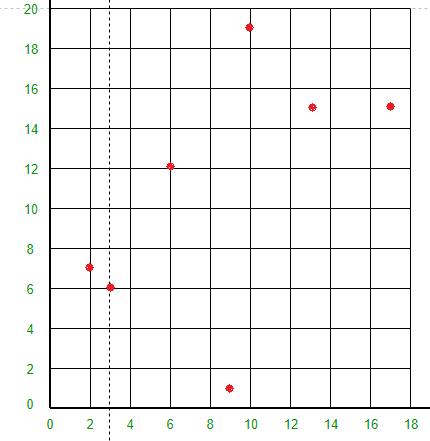
- 点 (2, 7) 将线 X = 3 左侧的空间水平分成两部分。在线 X = 3 左侧绘制线 Y = 7。

- 点 (17, 15) 将线 X = 3 右侧的空间水平分成两部分。在线 X = 3 右侧绘制线 Y = 15。

- 点 (6, 12) 将线 Y = 15 下方和线 X = 3 右侧的空间分成两部分。将线 X = 6 绘制在线 X = 3 的右侧和线 Y = 15 下方。

- 点 (13, 15) 将线 Y = 15 下方和线 X = 6 右侧的空间分成两部分。将线 X = 13 绘制在线 X = 6 的右侧和线 Y = 15 下方。

- 点 (9, 1) 将线 X = 3、X = 6 和 Y = 15 之间的空间分成两部分。在线 X = 3 和 X = 13 之间绘制线 Y = 1。

- 点 (10, 19) 将线 X = 3 右侧和线 Y = 15 上方的空间分成两部分。将线 Y = 19 绘制在线 X = 3 右侧和线 Y = 15 上方。

以下是 KD 树基本操作(如搜索、插入和删除)的 C++ 实现。
- C++
- Java
- Python3
- C#
- JavaScript
// A C++ program to demonstrate operations of KD tree
#include<bits/stdc++.h>
using namespace std;
const int k = 2;
// A structure to represent node of kd tree
struct Node
{
int point[k]; // To store k dimensional point
Node *left, *right;
};
// A method to create a node of K D tree
struct Node* newNode(int arr[])
{
struct Node* temp = new Node;
for (int i=0; i<k; i++)
temp->point[i] = arr[i];
temp->left = temp->right = NULL;
return temp;
}
// Inserts a new node and returns root of modified tree
// The parameter depth is used to decide axis of comparison
Node *insertRec(Node *root, int point[], unsigned depth)
{
// Tree is empty?
if (root == NULL)
return newNode(point);
// Calculate current dimension (cd) of comparison
unsigned cd = depth % k;
// Compare the new point with root on current dimension 'cd'
// and decide the left or right subtree
if (point[cd] < (root->point[cd]))
root->left = insertRec(root->left, point, depth + 1);
else
root->right = insertRec(root->right, point, depth + 1);
return root;
}
// Function to insert a new point with given point in
// KD Tree and return new root. It mainly uses above recursive
// function "insertRec()"
Node* insert(Node *root, int point[])
{
return insertRec(root, point, 0);
}
// A utility method to determine if two Points are same
// in K Dimensional space
bool arePointsSame(int point1[], int point2[])
{
// Compare individual pointinate values
for (int i = 0; i < k; ++i)
if (point1[i] != point2[i])
return false;
return true;
}
// Searches a Point represented by "point[]" in the K D tree.
// The parameter depth is used to determine current axis.
bool searchRec(Node* root, int point[], unsigned depth)
{
// Base cases
if (root == NULL)
return false;
if (arePointsSame(root->point, point))
return true;
// Current dimension is computed using current depth and total
// dimensions (k)
unsigned cd = depth % k;
// Compare point with root with respect to cd (Current dimension)
if (point[cd] < root->point[cd])
return searchRec(root->left, point, depth + 1);
return searchRec(root->right, point, depth + 1);
}
// Searches a Point in the K D tree. It mainly uses
// searchRec()
bool search(Node* root, int point[])
{
// Pass current depth as 0
return searchRec(root, point, 0);
}
// Driver program to test above functions
int main()
{
struct Node *root = NULL;
int points[][k] = {{3, 6}, {17, 15}, {13, 15}, {6, 12},
{9, 1}, {2, 7}, {10, 19}};
int n = sizeof(points)/sizeof(points[0]);
for (int i=0; i<n; i++)
root = insert(root, points[i]);
int point1[] = {10, 19};
(search(root, point1))? cout << "Found\n": cout << "Not Found\n";
int point2[] = {12, 19};
(search(root, point2))? cout << "Found\n": cout << "Not Found\n";
return 0;
}
|
输出:
成立
未找到
时间复杂度:O(n)
辅助空间:O(n)
请参阅以下文章以了解如何查找最小值和删除操作。
- KD 树 (查找最小值)
- KD 树(删除)
4.2 K维树的优点-
Kd树作为一种数据结构有几个优点:
- 高效搜索:Kd 树可有效搜索 k 维空间中的点,例如最近邻搜索或范围搜索。
- 降维: Kd 树可用于降低问题的维数,从而缩短搜索时间并减少数据结构的内存要求。
- 多功能性: Kd树可用于广泛的应用,例如数据挖掘、计算机图形学和科学计算。
- 平衡: Kd 树是自平衡的,这确保了即使插入或删除数据时树仍然保持高效。
- 增量构建: Kd 树可以增量构建,这意味着可以在结构中添加或删除数据,而不必重建整个树。
- 易于实现: Kd树相对容易实现,可以用多种编程语言来实现。
参考题目:
Search and Insertion in K Dimensional tree - GeeksforGeeks