当SoC芯片流片回来后,并不是直接通电就可以使用的。需要进行上电复位,然后对SoC进行配置使其进入到正常工作状态,然后才能运行正常的程序和任务。这是一个比较复杂的过程,也是在芯片设计阶段,SoC需要重点考虑的问题。上电不能成功,芯片流片回来直接就不能启动,这也是最重大的失败,所以保证芯片能正常上电启动是SoC设计最重要的第一步。
由于SoC各种各样,不同是SoC的启动流程是有区别的,但是大部分SoC遵循着基本的流程:
-
上电复位:芯片通电后,所有寄存器和内存被重置到初始状态。
-
Boot阶段:初始化硬件;
-
操作系统启动:内核初始化,加载驱动,挂载文件系统。
-
用户空间初始化:启动系统服务和用户界面。
这个过程确保了SOC从断电状态到操作系统完全运行的平滑过渡。下面详细说明每个阶段的内容。
上电复位(Power-On Reset)
当SOC通电或复位信号触发时,SOC进入复位状态。复位电路会将所有寄存器和内存重置为已知的初始状态,确保系统从一个干净的状态开始启动。
Power-On Reset缩写为POR,这是一个非常常见的缩写,需要记住。
这个阶段还需要准备好Boot Mode Pin,确定Boot的介质,Boot Mode在POR释放时候锁存。
POR释放后开始reset flow阶段,SoC内部一般有一个控制reset sequence的状态机FSM,来进行启动阶段的reset。这个reset的控制和SoC内部实现强相关,不同的SoC有不同的实现方式。
同时还会完成下面任务:
-
确认PLL输出时钟稳定;
-
会启动必要的外设的时钟;
-
释放必要的模块的reset;
-
使用OTP配置内部模块;
-
进行进行Power-On Self-Test(POST)等
越是复杂的SoC,在这个阶段需要做的事情越多。
Boot阶段
系统引导程序
在遥远的单片机时代,嵌入式设备功能比较单一,每个设备只需要执行一件简单的任务,因此在系统初始化完成后,程序就运行在一个大循环中,此时,系统启动流程和功能代码并没有很严格的区分。 随着技术的发展,嵌入式系统变得越来越复杂,单片机(MCU)和系统级芯片(SoC)之间的差异也越来越明显。在早期的单片机时代,设备的处理能力有限,通常只需要执行一些简单的任务,如控制一个电机或者读取传感器数据。这些任务通常可以通过一个简单的程序循环来实现,不需要复杂的操作系统。
然而,随着SoC的出现,情况发生了变化。SoC通常包含多个处理器核心、图形处理单元(GPU)、数字信号处理器(DSP)、以及其他专用硬件模块,如网络接口、存储控制器等。这些复杂的硬件需要更高级的管理,以便它们能够协同工作,提供更丰富的功能。
系统引导程序(Bootloader)在SoC中扮演着至关重要的角色。它的主要任务包括:
-
硬件初始化:在系统上电后,引导程序首先需要初始化硬件,包括设置时钟、配置内存、初始化外设等。
-
安全启动:为了保护系统不被恶意软件攻击,引导程序会检查操作系统映像的完整性和合法性。
-
配置系统环境:设置系统运行所需的参数,如CPU工作模式、内存管理单元(MMU)配置等。
-
加载操作系统:将操作系统映像从存储设备(如闪存、硬盘)加载到内存中。
-
跳转到操作系统:一旦操作系统加载完成,引导程序会将控制权交给操作系统,让操作系统接管系统的控制。
这些操作系统或启动程序是由c或者c++等程序写成的,编译成.bin或者.hex文件,存储到非易失性存储器中,或者存储在外部存储设备上。这些文件被称为镜像文件(image)
BootROM和XIP
在系统初始化时,cpu只能访问可以直接寻址的存储器:
-
如果支持XIP启动方式,可被存储在片外可直接执行的介质中(如NOFLASH);
-
如果不支持XIP启动,则需要存储到芯片内部的ROM中,也就是最常见的BootROM;
在芯片出厂后该部分代码就将被固化,后续再也不能被修改和升级。若芯片要支持安全启动,则需要将BOOTROM作为启动时的信任根,此时除调试阶段外,SOC必须禁用XIP。
BOOT流程
一般情况下都会采用内部ROM的方式进行boot,如果内部ROM出问题了,可以采用XIP进行debug或者作为备份。
典型的boot流程一般分为:
First stage (BootRom)->Second Stage (u-boot/bare metal)
两个阶段。对不同的cpu架构,规定的boot流程规范是不同的。
ARM boot流程
ARM V8 Boot流程:
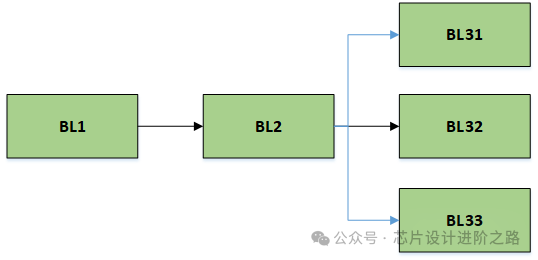
Armv8的启动流程包含多个阶段,典型地有BL1、BL2、BL31、BL32、BL33,根据需求的不同,这些阶段可以适当地裁剪或添加。
它们的源码会被编译成独立的启动镜像,并被保存到特定的存储介质中。由于一般的存储介质(如SPI Flash,nand flash、emmc、ssd等)都不支持代码的直接执行,因此需要在启动时先将镜像加载到可直接执行代码的存储介质,如SRAM中,然后运行相关代码。其典型的加载流程如下:
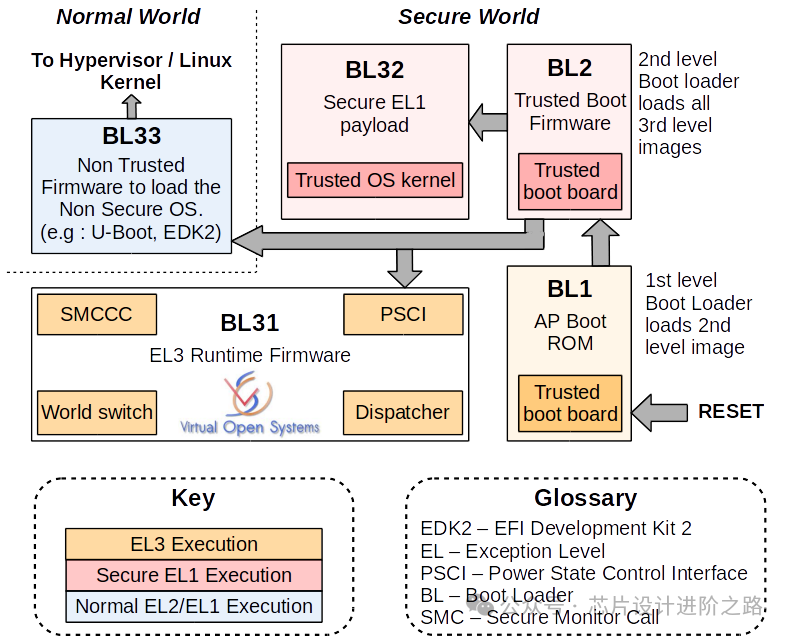
在ARMv8架构中,启动流程包含多个阶段,这些阶段通常被称为BL(Bootloader)阶段:
-
BL1:这是第一阶段的启动固件,通常位于ROM中,负责引导BL2并对其进行安全验证。
-
BL2:第二阶段的启动固件,通常存储在Flash中,负责平台相关的初始化,比如内存(DDR)初始化,并寻找BL31或BL33执行。
-
BL31:如果存在,BL2会加载BL31。BL31是持久存在的可信固件,负责系统安全服务和在安全与非安全世界之间切换。
-
BL32(可选):通常包含OP-TEE OS和安全应用,运行在EL1,启动EL0的安全应用,完成后返回BL31。
-
BL33:这是非安全世界的启动固件,通常是U-Boot或者直接启动Linux内核。
这里说明一下:
armv8架构分为Secure World和Non-Secure World(Normal World),四种异常级别从高到低分别为EL3,EL2,EL1,EL0。
安全世界与非安全世界:
-
Secure World:执行可信的固件和应用,如支付、指纹识别等。
-
Non-Secure World:运行常见的操作系统和裸机程序。
异常级别:
-
EL3:最高权限级别,负责安全监控和模式切换。
-
EL2:提供虚拟化支持。
-
EL1:特权模式,运行操作系统或安全OS。
-
EL0:无特权模式,运行应用程序。所有APP应用都在EL0。
完整的调用流程如下:
ARM Trusted Firmware (ATF) 是为 ARMv8-A 架构设计的一套开源安全固件,它实现了从芯片启动到操作系统加载的整个过程中的安全启动要求。ATF 支持 ARM 的 TrustZone 技术,提供了Secure和Non-Secure执行环境之间的隔离。
BL2根据是否存在BL31和BL32可选择性的加载不同firmware,若系统需要支持Secure和Non-Secure两种执行状态,也就是支持ATF启动,则必须要从secure空间开始启动,且启动完成后需要通过secure monitor(BL31)完成normal os对secure空间服务相关请求的处理。
不支持ATF的启动
如果不支持ATF,那么阶段对应关系如下:
BL1: BootROM;
BL2: SPL(Secondary Program Loader),SPL在启动链中一般由bootrom加载而作为第二级启动镜像(bl2),它主要用于完成一些基础模块和ddr的初始化,以及加载下一级镜像uboot。
BL33:最常见的是u-boot;
这时候流程为:

由于SPL需要被加载到SRAM中执行,对于有些sram size比较小的系统,可能无法放入整个spl镜像,TPL即是为了解决该问题引入的。
TPL: Tertiary Program Loader,三级加载器
加入了TPL之后,可将SPL的功能进一步划分为两部分,如SPL包含ddr初始化相关代码,而TPL包含镜像加载相关驱动,从而减少SPL镜像的size。此时启动流程可被设计为如下方式:

支持ATF的启动
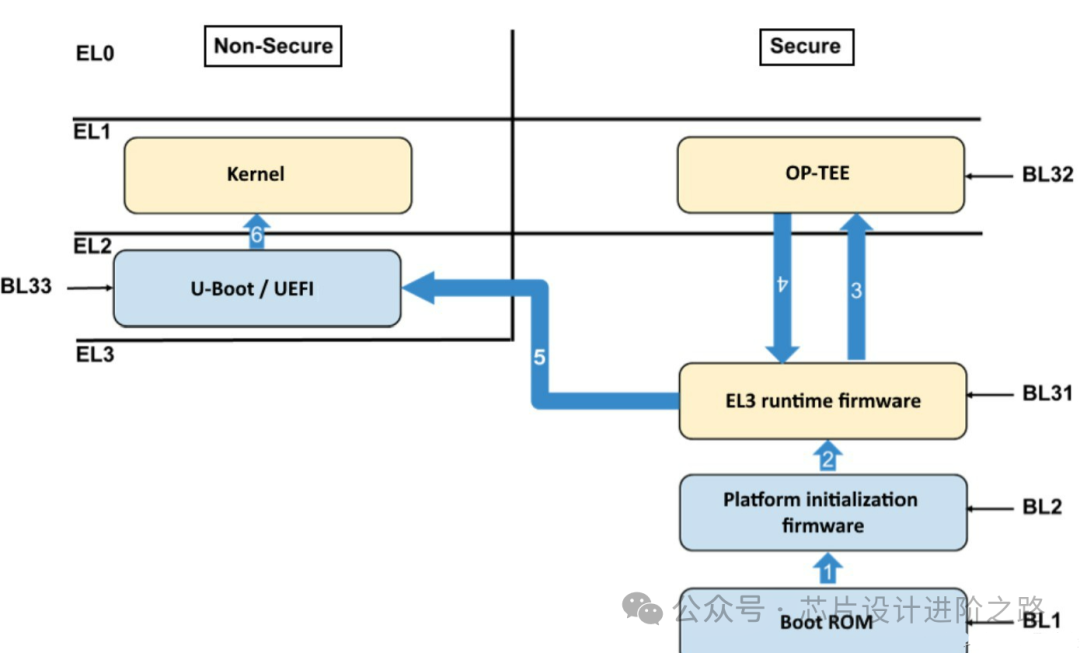
支持ATF的启动就是上面所述的完整的ARM V8启动流程:
ATF启动uboot的典型镜像跳转流程如下:

在以上流程中BL32是可选的,若不支持trust os则可裁剪掉该流程。典型情况下BL33为uboot,而BL2既可以使用ATF实现也可以用SPL实现。
ATF 还支持从 BL1 直接跳转到 BL31 的启动模式,这种方式可以加快启动速度,因为它跳过了 BL2 的加载过程。此外,ATF 还支持固件更新和恢复模式。
ATF 的启动流程是高度可定制的,不同的芯片厂商可能会根据自己的需求进行调整。
RSIC-V BOOT流程
先介绍一下RSIC-V的几种模式:
-
M-mode(Machine Mode)
-
S-mode(Supervisor Mode)
-
U-mode(User Mode)
对比ARM架构如下:
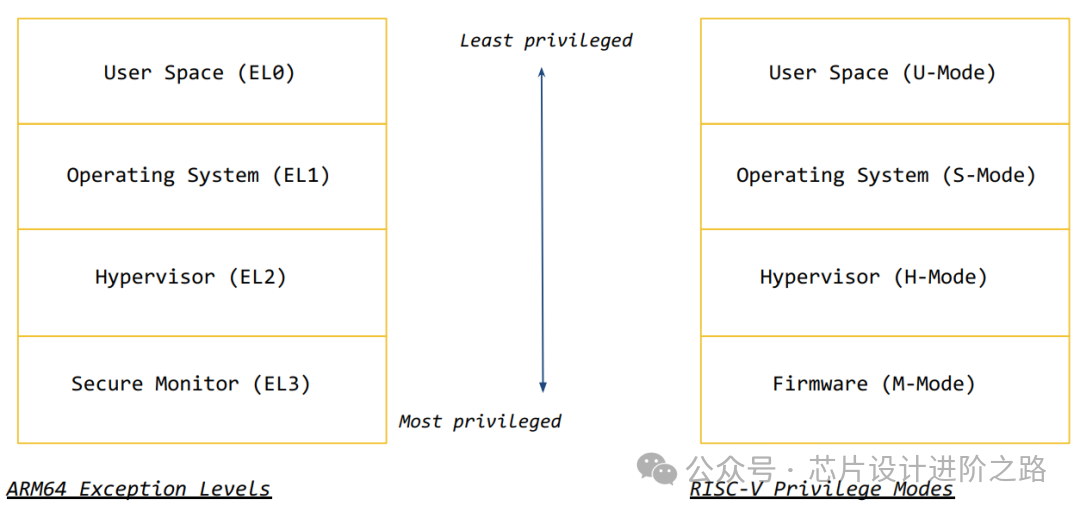
对于arm64来说,系统上电后启动会处于EL3 secure world ,所以对于arm64来说,一般都会使用ARM Trusted firmware (TF-A) 在normal world EL2 与 secure EL3 进行切换。
而对于risc-v来说,系统上电启动后会在M-Mode,而risc-v目前是没有Hypervisor这一层的概念的,所以目前采用的是opensbi。
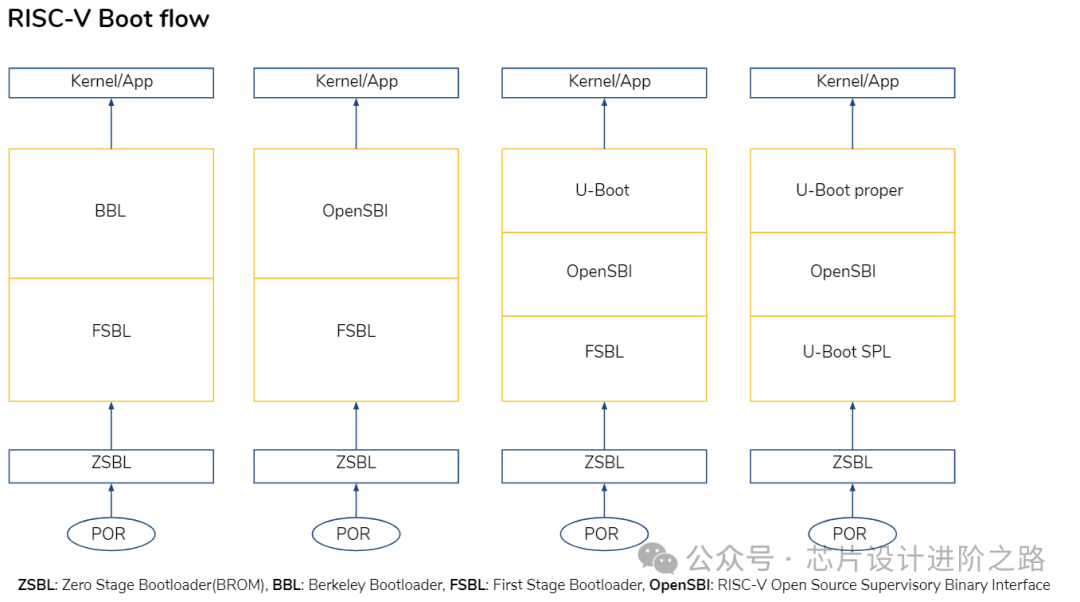
启动流程:RISC-V的启动流程可能包括以下几个阶段:
-
ZSBL (Zeroth Stage Boot Loader):片上ROM程序。
-
FSBL (First Stage Boot Loader):启动PLLs和初始化DDR内存。
-
BBL (Berkeley Boot Loader):提供加载,并且管理着二进制接口(SBI)。
-
操作系统加载:如Linux内核的加载和启动。
操作系统启动
当引导加载程序加载操作系统内核并将控制权移交给内核后,操作系统的启动过程正式开始。这个阶段包括内核初始化、硬件设备驱动程序初始化、挂载根文件系统以及初始进程启动。
用户空间初始化
在操作系统内核成功启动后,系统进入用户空间初始化阶段。这包括启动脚本和服务、用户登录和图形界面的启动,为用户提供交互界面。
这两个部分主要涉及到软件,内容比较复杂,就不展开讨论。





















