STM32 RTC实时时钟学习总结
写于2024/9/25下午
文章目录
- STM32 RTC实时时钟学习总结
- 1. 简介
- 2. 流程框图介绍
- 3. 相关寄存器介绍
- 4. 代码解析
1. 简介
STM32F103 的实时时钟(RTC)是一个独立的定时器。STM32 的 RTC 模块拥有一组连续计数的计数器,在相对应的软件配置下,可提供时钟日历的功能。修改计数器的值可以重新设置系统的当前时间和日期。
RTC时钟最大的特点就是,可以用作实时时钟。因为普通定时器在MCU掉电后无法运行,而RTC可以通过后备电源供电使其保持运行。RTC 模块和时钟配置系统(RCC_BDCR 寄存器)是在后备区域,即在系统复位或从待机模式唤醒后 RTC 的设置和时间维持不变,只要后备区域供电正常,那么 RTC 将可以一直运行。但是在系统复位后,会自动禁止访问后备寄存器和 RTC,以防止对后备区域(BKP)的意外写操作。所以在要设置时间之前,先要取消备份区域(BKP)写保护。
2. 流程框图介绍
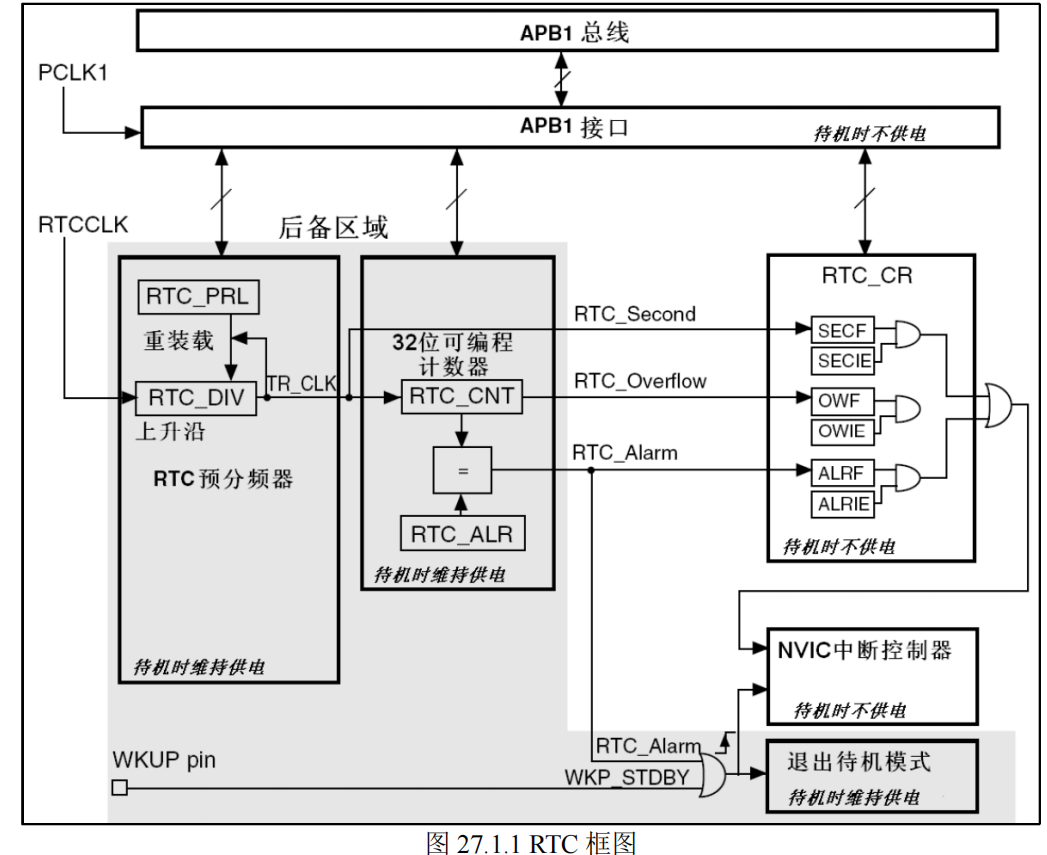
框图中浅灰色的部分,他们是属于备份域的,在 VDD掉电时可在 VBAT 的驱动下继续工作,这部分包括 RTC 的分频器,计数器以及闹钟控制器。
① APB1接口:用来和 APB1 总线相连。通过 APB1 总线可以访问 RTC 相关的寄存器,对其进行读写操作。
可以看到,APB1接口的时钟来源于PCLK1,而RTC时钟来源与RTCCLK,二者时钟来源不同,频率也不同
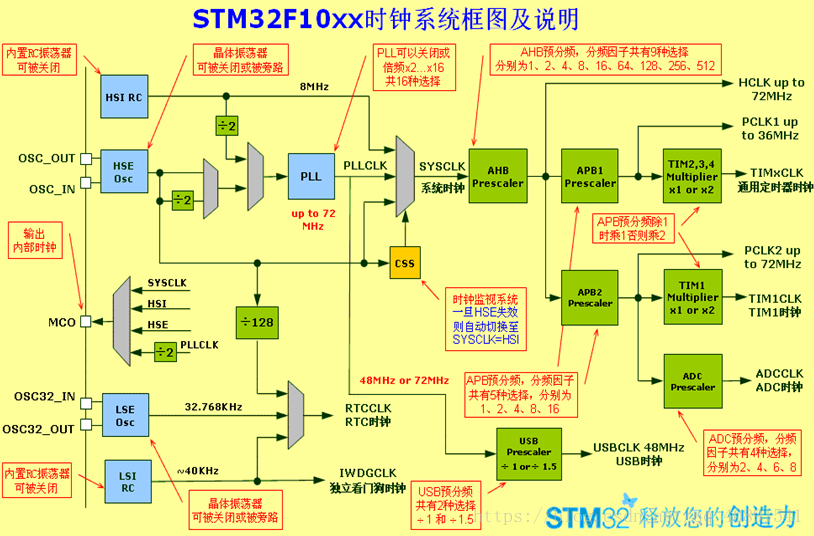
RTC时钟来源为LSE(外部低速晶振),LSI(内部低速晶振),以及HSE/128(外部高速晶振的128分频)。
② RTC核心 :由一组可编程计数器组成,主要分成两个模块。第一个模块是 RTC 的预分频模块,它可编程产生 1 秒的 RTC 时间基准 TR_CLK。RTC 的预分频模块包括了一个 20 位的可编程分频器RTC_PRL。如果在 RTC_CR 寄存器中设置相对应的允许位,则在每个TR_CLK 周期中 RTC 产生一个中断(秒中断)。
RTC_PRL:预分频装载寄存器
RTC_DIV:预分频器余数寄存器
第二个模块是一个 32 位的可编程计数器RTC_CNT,可被初始化为当前的系统时间,一个 32 位的时钟计数器,按秒钟计算,可以记录 4294967296 秒,约合 136 年左右,作为一般应用足够了。
RTC_CNT:计数器寄存器
RTC_ALR:闹钟寄存器
RTC 还有一个闹钟寄存器 RTC_ALR,用于产生闹钟。系统时间按 TR_CLK 周期累加并与存储在 RTC_ALR 寄存器中的可编程时间相比较,如果 RTC_CR 控制寄存器中设置了相应允许位,比较匹配时将产生一个闹钟中断。
下面来简述一下RTC的工作流程
首先,在初始化时候,我们将取消备份区域(BKP)写保护,然后通过APB1总线向DIV和PRL装载同样的数。RTCCLK频率为32.768kHz(LSE),来驱动DIV工作,DIV为自减寄存器。当DIV减少到0时,会产生一个TR_CLK信号,该信号会触发三件事情:
①将PRL的数重装在到DIV中;
②触发CNT计数器+1;
③触发SECF,进而产生秒中断。
我们会设置一个合理的预分频数,使得TR_CLK触发时间刚好是1s。ALR中存储的是我们设置的闹钟秒数,当CNT和ALR中的数据相同时,就会触发闹钟中断或者闹钟唤醒。(关于CNT和ALR中存放的数据,为时间戳。)
那么1s的时间如何计算?
![fTR_CLK = fRTCCLK/(PRL[19:0]+1)](https://img-blog.csdnimg.cn/img_convert/0d948f94c464948bd04f95d154029790.png)
我们的RTC_CLK为32.768kHz,所以只要PRL中写入32767即可,即为2的15次方。
我们只需要在PRL的低16位寄存器中写入0x7FFF即可,就能获得每秒一次的TR_CLK信号。
DIV寄存器存在的意义?
从上述能知道TR_CLK输出必须为1s。那么我们想要的到0.15s,应该怎么实现呢?
道理很简单,因为DIV是自减的,并且从32768一直减少到0,所需要的时间为1s。所以减少一个数,所用的时间为1/32768s,那么减少多少个数,就计时了0.15s呢?
1/32768s * n = 0.15
n = 0.15 * 32768
又因为DIV寄存器是可读的,所以我们就能实现0.15s的计时。
从框图中,还可以看到,只有秒中断和闹钟中断能触发中断,溢出是没有中断的。
3. 相关寄存器介绍
RTC控制寄存器(RTC_CRH/CRL)
RTC 控制寄存器共有两个控制寄存器 RTC_CRH 和 RTC_CRL,两个都是 16 位的。
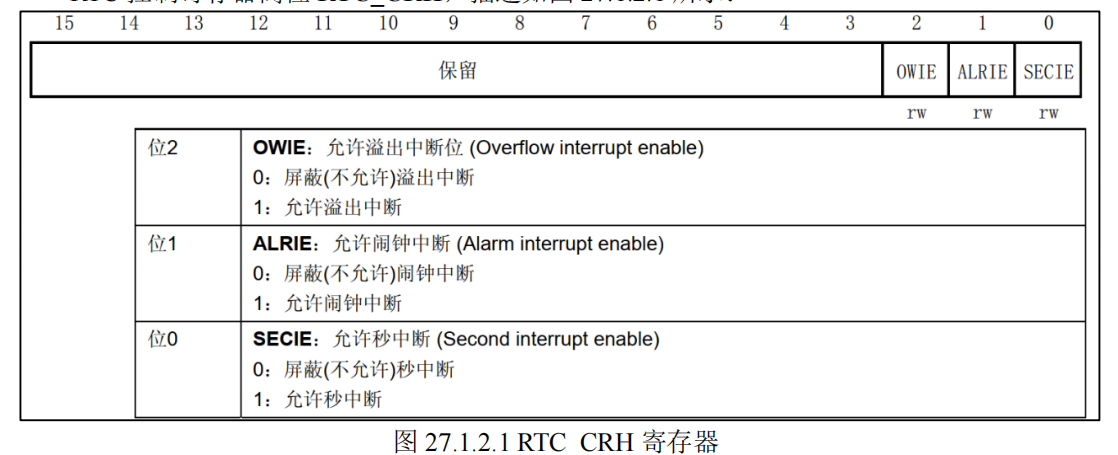
RTC 控制寄存器高位 RTC_CRH,描述如图 27.1.2.1 所示:
RTC 控制寄存器低位 RTC_CRL,描述如图 27.1.2.2 所示:
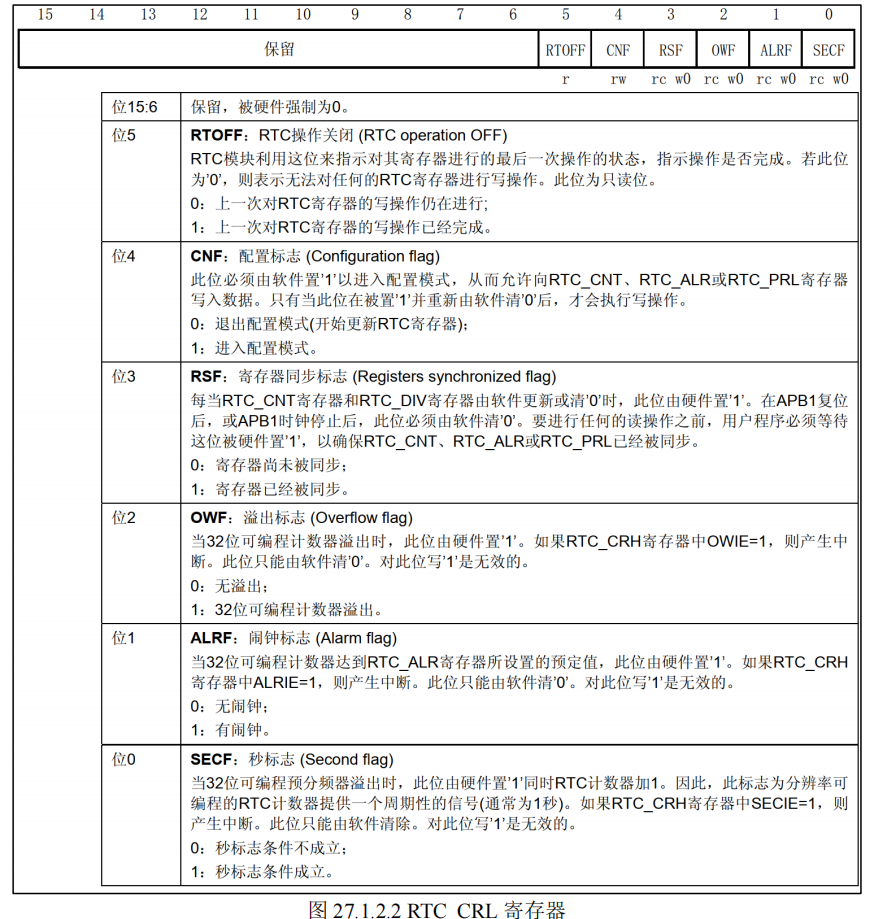
第0位是秒钟标志位,我们在进入闹钟中断的时候,通过判断这位来决定是不是发生了秒钟中断。然后必须通过软件将该位清零(写零)。
第 3 位为寄存器同步标志位,我们在修改控制寄存器RTC_CRH/RTC_CRL 之前,必须先判断该位,是否已经同步了,如果没有则需要等待同步,在没同步的情况下修改 RTC_CRH/RTC_CRL 的值是不行的。
第 4 位为配置标志位,在软件修改RTC_CNT/RTC_PRL 的值的时候,必须先软件置位该位,以允许进入配置模式。
第 5 位为 RTC操作位,该位由硬件操作,软件只读。通过该位可以判断上次对 RTC 寄存器的操作是否完成,如果没有,我们必须等待上一次操作结束才能开始下一次操作。
备份数据寄存器(BKP_DRx)
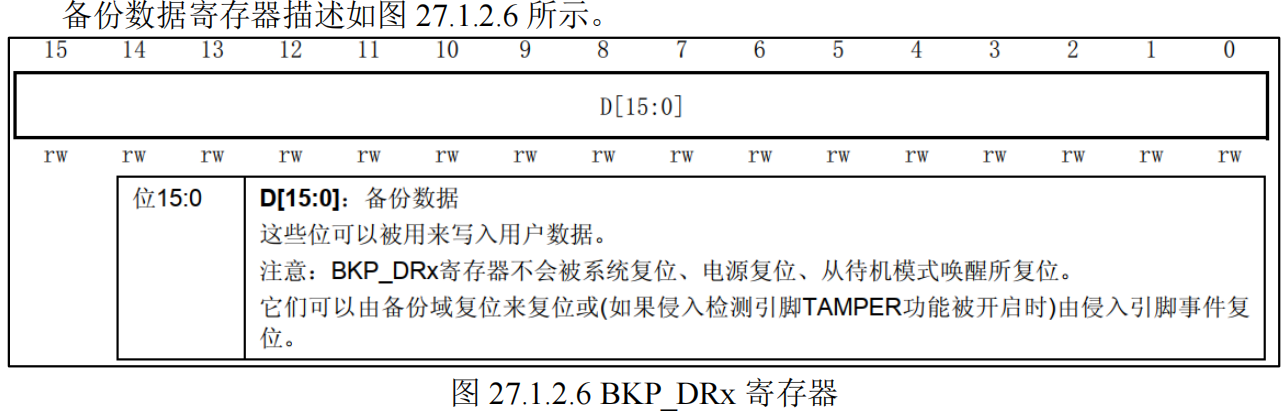
可以把它看作是一个EEPROM,掉电不丢失的存储器。
DRx的x(x=1…10)什么意思呢?就是有10个这样的16位寄存器。
例如,RTC程序中,我们向DR1写入0x5050,开机检测是否已经配置过RTC
备份区域控制寄存器(RCC_BDCR)
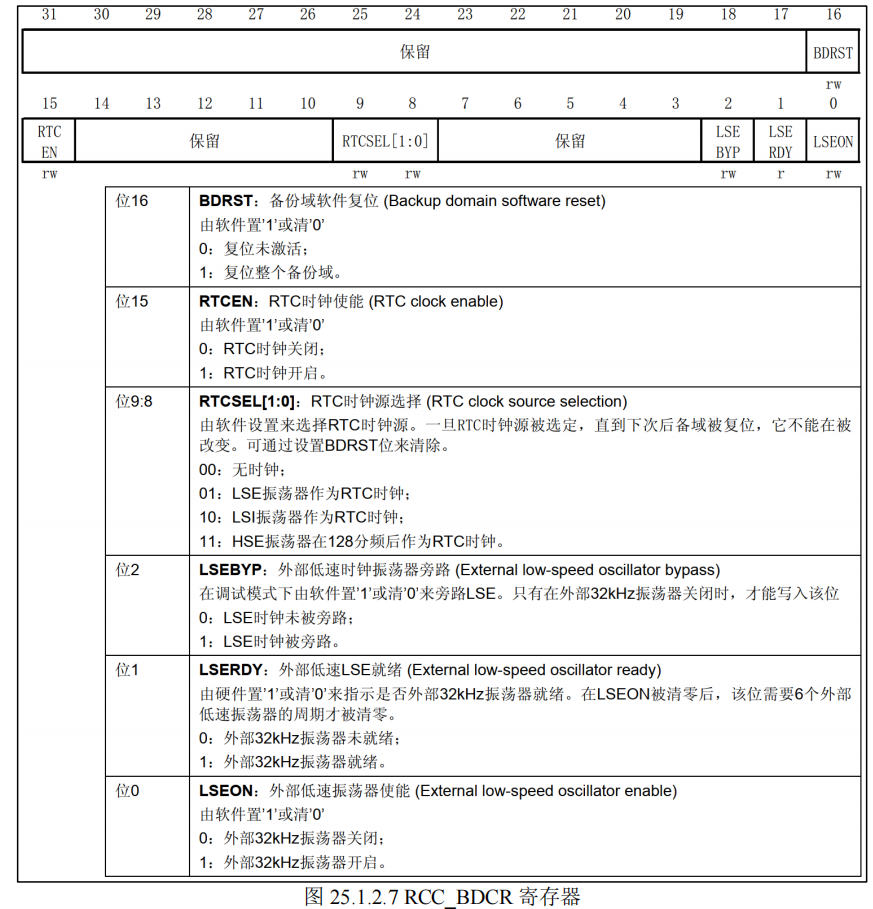
RTC 的时钟源选择及使能设置都是通过这个寄存器来实现的,所以我们在 RTC 操作之前先要通过这个寄存器选择 RTC 的时钟源,然后才能开始其他的操作。
4. 代码解析
/**
* @brief RTC写入后备区域SRAM
* @param bkrx : 后备区寄存器编号,范围:0~41
对应 RTC_BKP_DR1~RTC_BKP_DR42
* @param data : 要写入的数据,16位长度
* @retval 无
*/
void rtc_write_bkr(uint32_t bkrx, uint16_t data)
{
HAL_PWR_EnableBkUpAccess(); /* 取消备份区写保护 */
HAL_RTCEx_BKUPWrite(&g_rtc_handle, bkrx + 1, data);
}
/**
* @brief RTC读取后备区域SRAM
* @param bkrx : 后备区寄存器编号,范围:0~41
对应 RTC_BKP_DR1~RTC_BKP_DR42
* @retval 读取到的值
*/
uint16_t rtc_read_bkr(uint32_t bkrx)
{
uint32_t temp = 0;
temp = HAL_RTCEx_BKUPRead(&g_rtc_handle, bkrx + 1);
return (uint16_t)temp; /* 返回读取到的值 */
}
RTC_HandleTypeDef g_rtc_handle; /* RTC控制句柄 */
uint8_t rtc_init(void)
{
__HAL_RCC_PWR_CLK_ENABLE(); //使能电源时钟
__HAL_RCC_BKP_CLK_ENABLE(); //使能后备区域时钟
HAL_PWR_EnableBkUpAccess(); //取消备份区写保护
g_rtc_handle.Instance = RTC;
g_rtc_handle.Init.AsynchPrediv = 32767;
g_rtc_handle.Init.OutPut = RTC_OUTPUTSOURCE_NONE;
HAL_RTC_Init(&g_rtc_handle);//初始化RTC时钟,预分频值设为32767,TAMPER引脚输出为空
if (rtc_read_bkr(0) != 0x8888) //如果没配置过RTC,初次设置RTC起始时间
{
rtc_set_time(2088, 8, 8, 8, 8, 8);
rtc_write_bkr(0, 0x8888);
}
return 0;
}
void HAL_RTC_MspInit(RTC_HandleTypeDef *hrtc) //初始化RTC
{
__HAL_RCC_RTC_ENABLE(); //使能RTC时钟
RCC_OscInitTypeDef rcc_oscinitstruct;
RCC_PeriphCLKInitTypeDef rcc_periphclkinitstruct;
rcc_oscinitstruct.OscillatorType = RCC_OSCILLATORTYPE_LSE;
rcc_oscinitstruct.LSEState = RCC_LSE_ON;
rcc_oscinitstruct.PLL.PLLState = RCC_PLL_NONE;
HAL_RCC_OscConfig(&rcc_oscinitstruct); //激活LSE时钟
rcc_periphclkinitstruct.PeriphClockSelection = RCC_PERIPHCLK_RTC;
rcc_periphclkinitstruct.RTCClockSelection = RCC_RTCCLKSOURCE_LSE;
HAL_RCCEx_PeriphCLKConfig(&rcc_periphclkinitstruct); //RTC选择LSE作为时钟源
}
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./USMART/usmart.h"
#include "./BSP/LED/led.h"
#include "./BSP/RTC/rtc.h"
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
usmart_dev.init(72); /* 初始化USMART */
led_init(); /* 初始化LED */
rtc_init();
while (1)
{
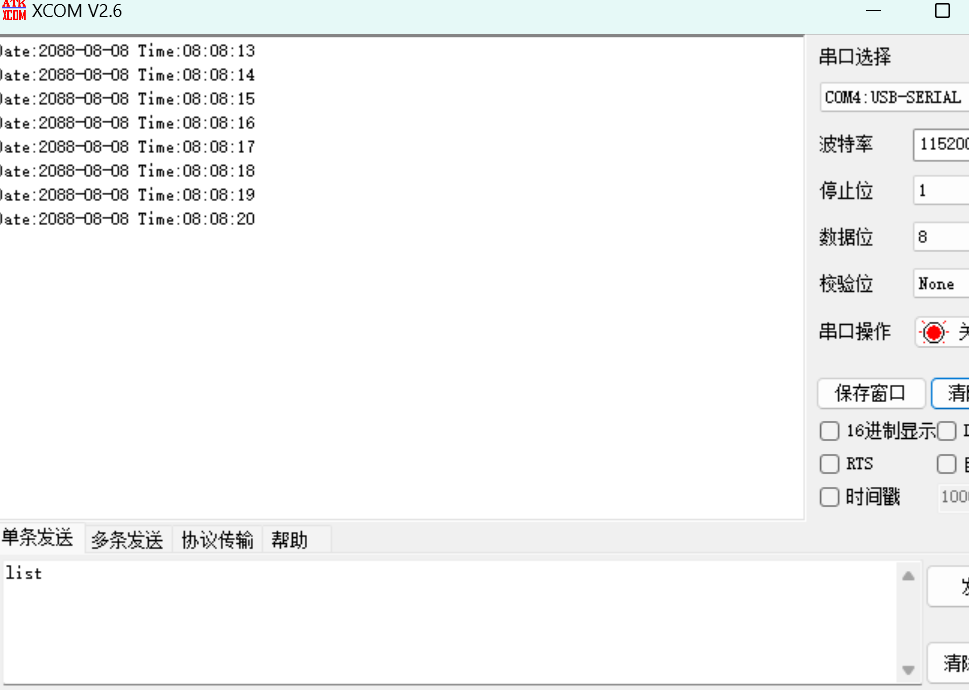
rtc_get_time();
printf("Date:%04d-%02d-%02d ", calendar.year, calendar.month, calendar.date);
printf("Time:%02d:%02d:%02d \r\n", calendar.hour, calendar.min, calendar.sec);
delay_ms(1000);
}
}
至此,RTC初始化完成
实验结果如图