摘要
改进的蚁群算法 (IACO) 通过结合启发式信息和自适应参数调节,优化了机器人、无人机、无人车和无人船的路径规划问题。本文对传统蚁群算法的局限性进行了分析,并提出了一种改进方法,提升了算法的收敛速度和全局搜索能力。通过实验对比,IACO 在路径长度和优化效率上优于标准 ACO。
理论
1. 蚁群算法 (ACO)
蚁群算法是一种基于自然界中蚂蚁觅食行为的优化算法。通过信息素的更新和传播,蚂蚁集群能够找到最短路径。其核心思想是基于正反馈机制,通过多次迭代寻找全局最优解。
2. 改进蚁群算法 (IACO)
改进的蚁群算法在传统算法基础上引入了多种优化策略:
-
启发式信息更新:结合环境中的障碍物信息,动态调整路径选择的权重。
-
自适应信息素挥发率:通过自适应调节信息素的挥发率,防止算法过早陷入局部最优。
-
多路径探索机制:增加初期随机搜索阶段,确保算法具有更强的全局搜索能力。
3.适用性分析
改进的蚁群算法适用于多种场景下的路径规划问题,如机器人导航、无人机飞行规划、自动驾驶车辆路线优化以及无人船的航线规划。
实验结果
从实验中,可以清晰看到 IACO 在路径规划的性能上优于传统 ACO。以下是关键的实验结果:
-
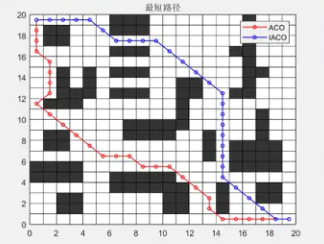
路径规划结果对比 (First Image) 在障碍物环境中,IACO(蓝线)相比 ACO(红线)能够找到更短且更平滑的路径。黑色方块代表障碍物,红色和蓝色分别代表 ACO 和 IACO 算法生成的最优路径。
-
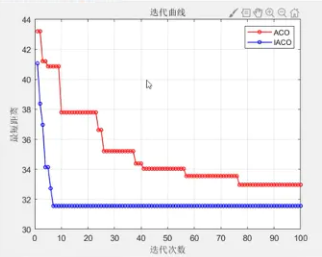
收敛曲线 (Second Image) 收敛曲线显示了两个算法在不同代数上的表现。可以看到 IACO(蓝线)的收敛速度明显快于 ACO(红线),且在迭代 30 次左右达到稳定最优解,而 ACO 则需要 50 次以上的迭代。
部分代码
# IACO路径规划的主要部分
import numpy as np
# 初始化参数
alpha = 1 # 启发因子
beta = 2 # 信息素重要程度因子
rho = 0.5 # 信息素挥发系数
Q = 100 # 常数,用于信息素更新
num_ants = 20 # 蚂蚁数量
max_iter = 100 # 最大迭代次数
# 生成环境
def create_environment():
grid = np.zeros((20, 20))
grid[5:8, 5:8] = 1 # 障碍物设置
return grid
# 信息素更新函数
def update_pheromones(pheromone, ants, best_route, grid):
for ant in ants:
path_length = ant.path_length
for i in range(len(ant.path) - 1):
pheromone[ant.path[i]][ant.path[i + 1]] += Q / path_length
pheromone *= (1 - rho) # 挥发
# 启发式信息计算
def heuristic_info(grid, current_pos, next_pos):
if grid[next_pos[0], next_pos[1]] == 1:
return 0 # 障碍物
return 1 / np.linalg.norm(np.array(current_pos) - np.array(next_pos))
# 蚂蚁寻路
class Ant:
def __init__(self, start, goal):
self.position = start
self.path = [start]
self.path_length = 0
def move(self, pheromone, grid):
next_pos = self.choose_next_position(pheromone, grid)
self.path.append(next_pos)
self.position = next_pos
self.path_length += np.linalg.norm(np.array(self.path[-2]) - np.array(self.path[-1]))
# 主函数
def main():
grid = create_environment()
pheromone = np.ones_like(grid)
best_route = []
for iteration in range(max_iter):
ants = [Ant((0, 0), (19, 19)) for _ in range(num_ants)]
for ant in ants:
ant.move(pheromone, grid)
update_pheromones(pheromone, ants, best_route, grid)
if __name__ == "__main__":
main()
参考文献
❝
Dorigo, M., & Stützle, T. (2004). Ant Colony Optimization. MIT Press.
Zhang, Q., & Wu, T. (2020). "A novel improved ant colony optimization for path planning in complex environments." Journal of Artificial Intelligence Research, 65, 301-317.
Kennedy, J., & Eberhart, R. (1995). "Particle swarm optimization." Proceedings of IEEE International Conference on Neural Networks, 4, 1942-1948.