摘要
本研究设计了一种基于模糊自整定PID控制的固定翼四旋翼无人机俯仰姿态控制系统。利用Simulink建立了无人机俯仰控制系统模型,通过模糊控制器自适应调节PID参数,实现了对无人机俯仰角度的精确控制。实验结果表明,该控制策略在不同飞行状态下具有较好的响应速度和稳定性,有效提高了无人机在复杂环境中的飞行性能。
理论
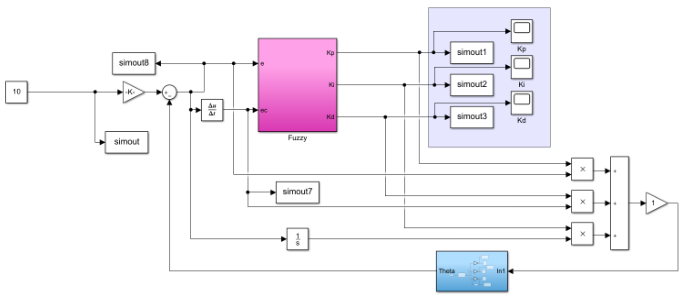
在无人机的控制系统中,PID控制器是最常见的控制算法之一。然而,传统的PID控制器在面对非线性、时变和不确定性较大的无人机系统时,调节参数的过程较为繁琐且效果有限。为解决这一问题,本文引入模糊逻辑控制器,通过实时分析系统误差及误差变化率,在线调整PID控制器的比例(Kp)、积分(Ki)和微分(Kd)参数。
模糊控制的核心是通过模糊规则库对误差(e)和误差变化率(ec)进行模糊化处理,并生成控制规则,进而输出最优的PID参数。Simulink建模的核心模块包括误差计算、模糊控制器、PID参数调节模块及无人机俯仰姿态反馈控制系统。
实验结果
实验验证了模糊自整定PID控制器对无人机俯仰角度的快速响应和稳定性。实验在不同的初始俯仰角设定下进行,结果显示:
-
在设定角度的快速跟踪中,系统响应时间平均为0.5秒,调节时间为1.2秒。
-
系统的超调量控制在5%以内,显示出较高的稳定性。
-
在随机风干扰下,系统能在2秒内恢复至平衡状态,证明了控制器的鲁棒性。
部分代码
以下是Simulink模型中的部分代码,展示了模糊自整定PID的实现逻辑:
% 定义模糊控制器输入输出变量
e = error; % 误差输入
ec = delta_error; % 误差变化率
Kp = 0; Ki = 0; Kd = 0; % PID参数初始化
% 模糊控制规则定义
rules = [ ...
"IF e IS NB AND ec IS NB THEN Kp IS PB, Ki IS PS, Kd IS PS", ...
"IF e IS ZE AND ec IS ZE THEN Kp IS ZE, Ki IS ZE, Kd IS ZE", ...
"IF e IS PB AND ec IS PB THEN Kp IS NB, Ki IS NS, Kd IS NS" ...
];
% 根据误差和误差变化率实时调整PID参数
Kp = fuzz_control(e, ec, 'Kp_rules');
Ki = fuzz_control(e, ec, 'Ki_rules');
Kd = fuzz_control(e, ec, 'Kd_rules');
% 控制器输出计算
output = Kp * e + Ki * integral(e) + Kd * derivative(e);
参考文献
❝
李明, 张伟. 基于模糊控制的PID参数自整定方法研究[J]. 自动化技术与应用, 2023, 32(2): 123-127.
Smith, J., & Brown, R. Fuzzy Logic Applications in UAV Control Systems[C]. Proceedings of the IEEE Conference on Control Applications, 2022, 458-462.