一、引言
在现代科技高速发展的今天,机器人技术作为自动化和智能化领域的重要分支,正以前所未有的速度改变着我们的生活和生产方式。其中,无线通信技术作为机器人远程控制的关键技术之一,其重要性不言而喻。蓝牙技术,凭借其低功耗、短距离通信、易于集成等优点,在小型机器人、智能家居、医疗设备等领域得到了广泛应用。本学习笔记将深入探讨如何通过蓝牙模块实现与机器人的通讯,进而控制其电机转动,从硬件选型、电路设计、软件编程、调试测试到实际应用,全方位解析这一过程。
二、硬件准备与选型
2.1 蓝牙模块
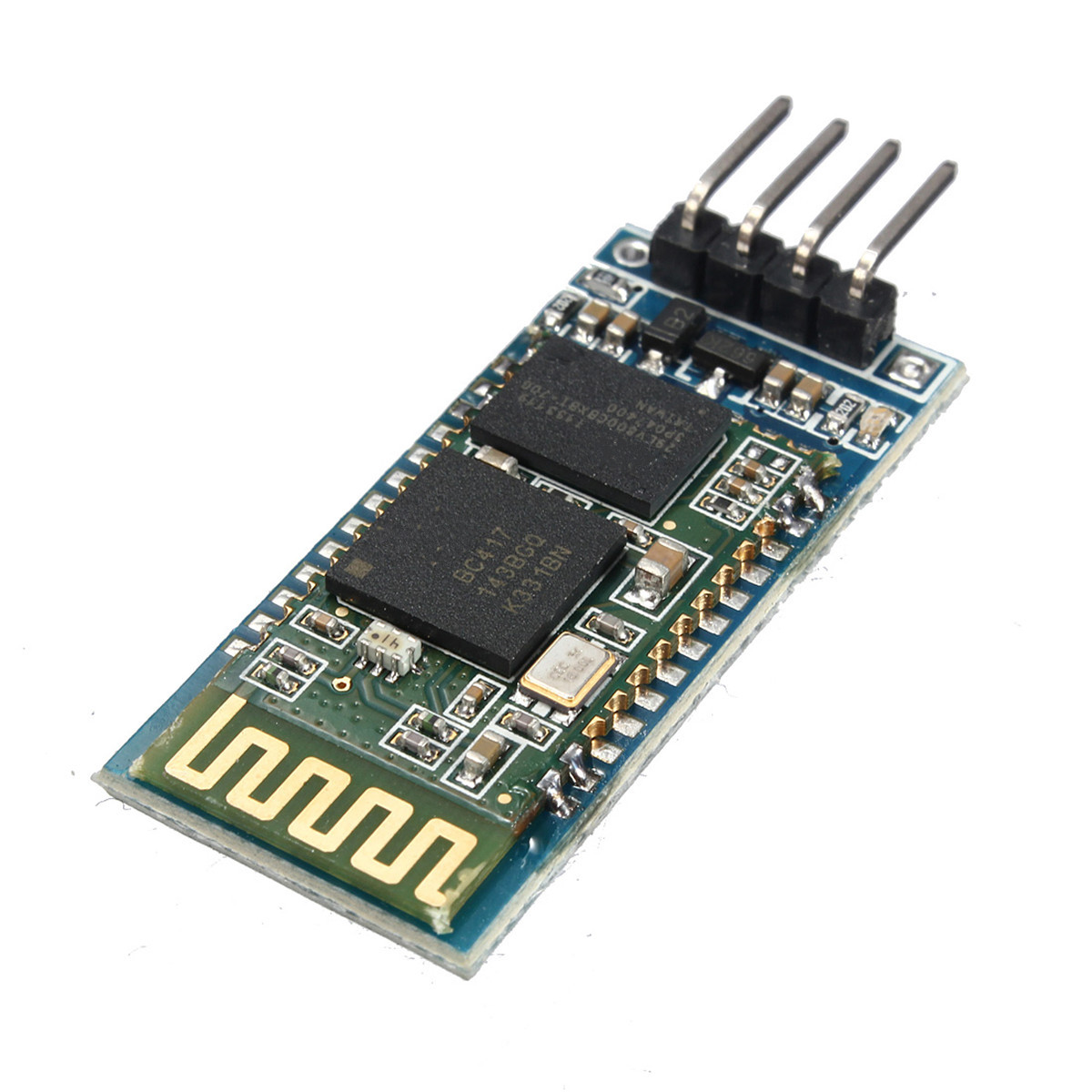
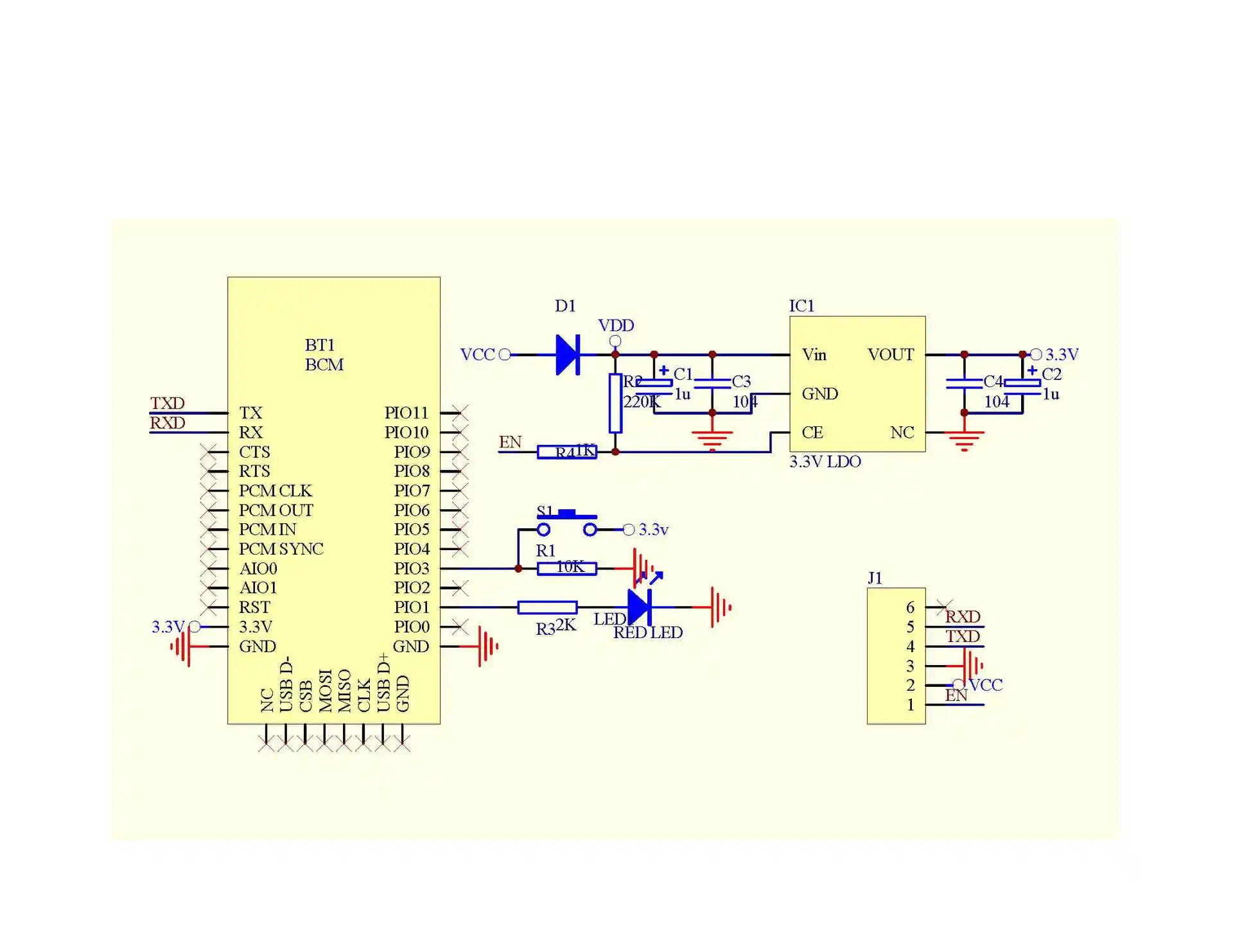
蓝牙模块是实现无线通信的核心部件。在选择蓝牙模块时,我们需要考虑多个因素,包括通信距离、功耗、传输速率、兼容性和成本等。常见的蓝牙模块有HC-05、HC-06等,它们基于蓝牙2.0或蓝牙4.0标准,具有稳定可靠的通信性能。HC-05模块因其高性价比和易于使用的特点,在DIY和教学中广受欢迎。该模块支持主从机模式,可以通过串口与微控制器(如Arduino)进行通信,实现数据的发送和接收。 您可以在电子元件供应商的网站(如某宝某东)上找到蓝牙模块(如HC-05或HC-06)的图片。通常,这些图片会清晰地展示模块的外观、尺寸和引脚定义。
2.2 电机与驱动板
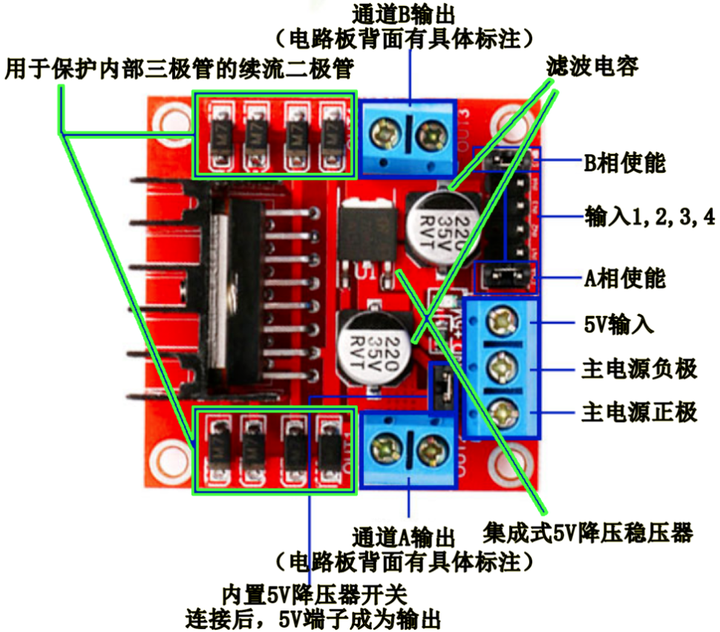
电机是机器人执行动作的动力来源,而驱动板则是控制电机转动的关键部件。在选择电机时,我们需要根据机器人的应用场景和需求,选择适当的电机类型(如直流电机、步进电机、伺服电机等)和规格。驱动板则负责将微控制器的控制信号转换为电机能够理解的驱动信号,常见的驱动板有L298N、TB6612等。L298N驱动板是一款双H桥电机驱动芯片,能够同时驱动两个直流电机,具有电流大、驱动能力强、发热量低等优点。

2.3 微控制器
微控制器是整个系统的“大脑”,负责接收蓝牙模块传来的指令,解析指令内容,并控制驱动板驱动电机转动。Arduino作为一款开源的电子原型平台,以其简单易学、功能强大、扩展性好等优点,在机器人制作中得到了广泛应用。Arduino Uno是Arduino系列中最经典的型号之一,具有14个数字输入输出引脚(其中6个可作为PWM输出)、6个模拟输入引脚、一个USB接口等,能够满足大多数基础项目的需求。
点击机器人入门系列:《通过蓝牙模块通讯控制机器人电机转动》——古月居可查看全文













![QQ频道机器人零基础开发详解(基于QQ官方机器人文档)[第三期]](https://i-blog.csdnimg.cn/direct/62b8466c976f4faf94948cc92391a4cb.png#pic_center)