文章目录
- 前言
- 一、SPI协议
- 1、应用
- 2、组成
- 二、OLED屏显和汉字点阵编码原理
- 1、汉字点阵编码原理
- 2、OLED屏显
- 三、OLED模块
- 四、显示自己的学号和姓名
- 五、显示温湿度&滑动显示长字符
- 六、总结
- 七、参考资料
前言
- 硬件:stm32f103c8t6 核心板
- 软件:keil5 mdk
- 软件:野火串口调试助手
- 0.96寸SPI_OLED模块配套资料包:
链接:https://pan.baidu.com/s/1mdLUqBqQZ_gMOzDHM7rU2g
提取码:1234 - 本次实验的demo程序:
链接:https://pan.baidu.com/s/15L1ATxV3cVhf0LFWDMRErg
提取码:1234 - 取字模的工具
链接:https://pan.baidu.com/s/1ZSrDvhP-mwLQB9F0X_uLlQ
提取码:1234
一、SPI协议
1、应用
SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串行外围设备接口,是一种高速全双工的通信总线。它被广泛地使用在 ADC、LCD 等设备与 MCU 间,要求通讯速率较高的场合。
2、组成
与I2C协议相同,把它分为物理层和协议层。
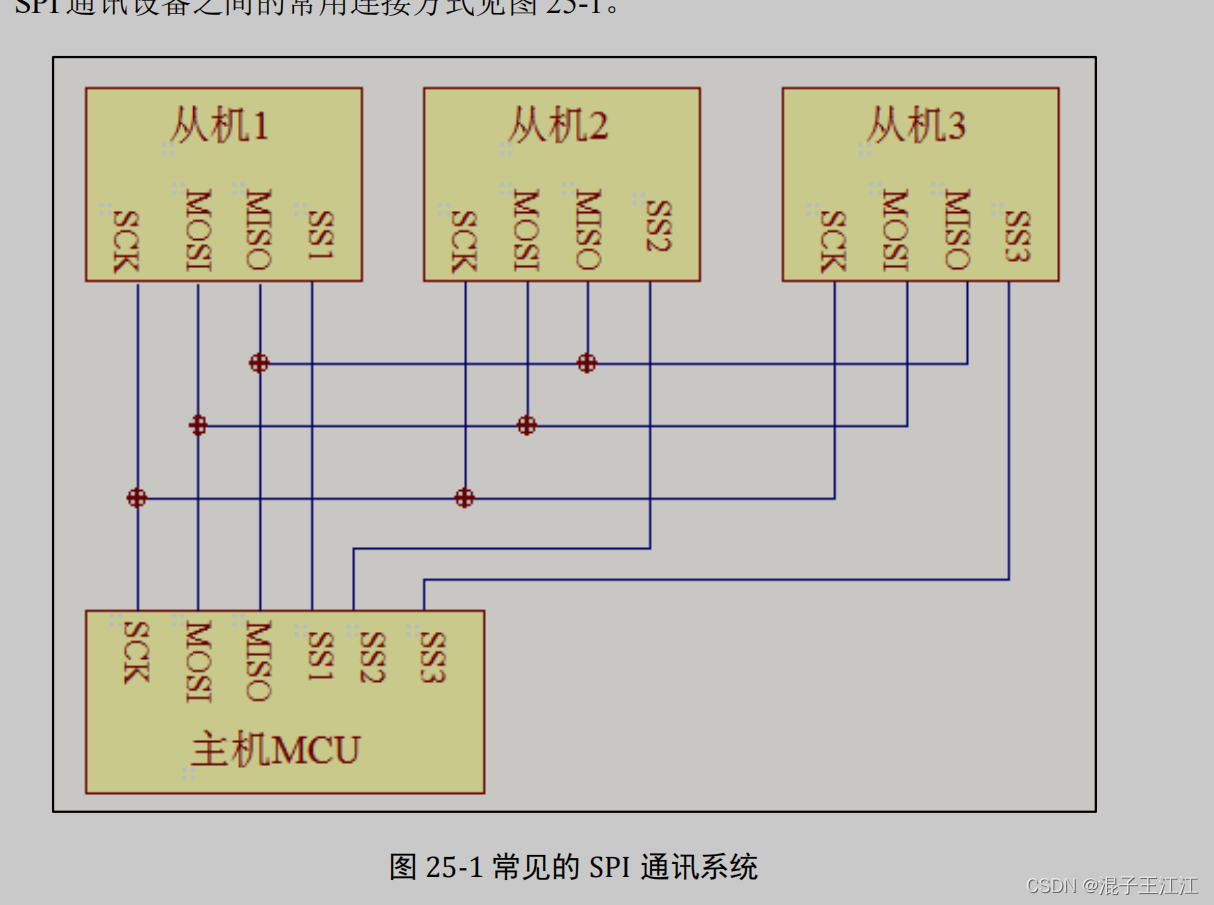
- SPI通讯设备之间的常用连接方式
- 物理层
SPI 通讯使用 3 条总线及片选线,3 条总线分别为 SCK、MOSI、MISO,片选线为 NSS。
NSS :SPI 协议中没有设备地址,它使用 NSS 信号线来寻址,当主机要选择从设备时,把该从设备的 NSS 信号线设置为低电平,该从设备即被选中,即片选有效,接着主机开始与被选中的从设备进行 SPI通讯。
SCK (Serial Clock):时钟信号线,用于通讯数据同步。
MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。
MISO(Master Input,,Slave Output):主设备输入/从设备输出引脚。
- 协议层
与 I2C 的类似,SPI 协议定义了通讯的起始和停止信号、数据有效性、时钟同步等环节。
- STM32的SPI架构:
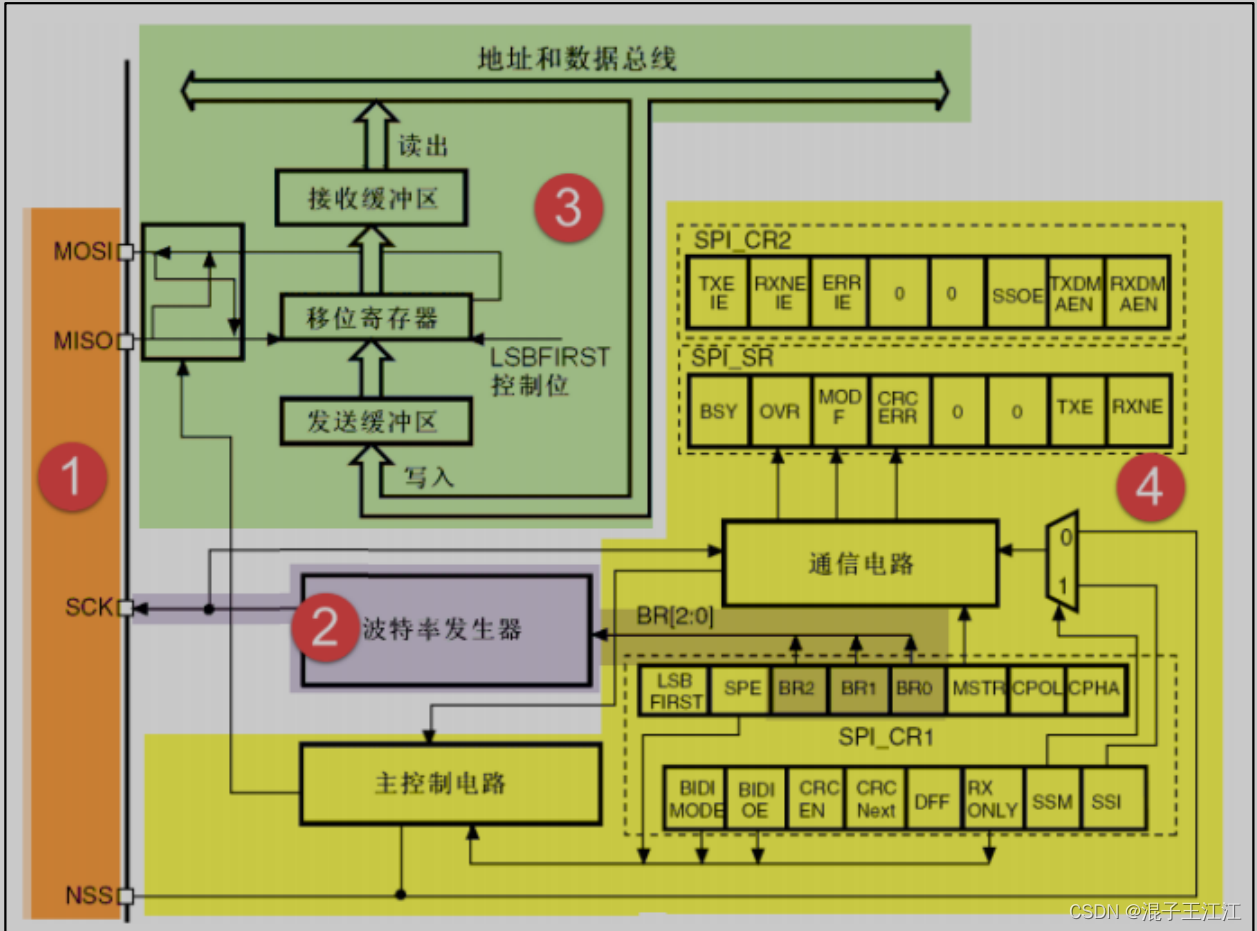
-
基本通讯过程
-
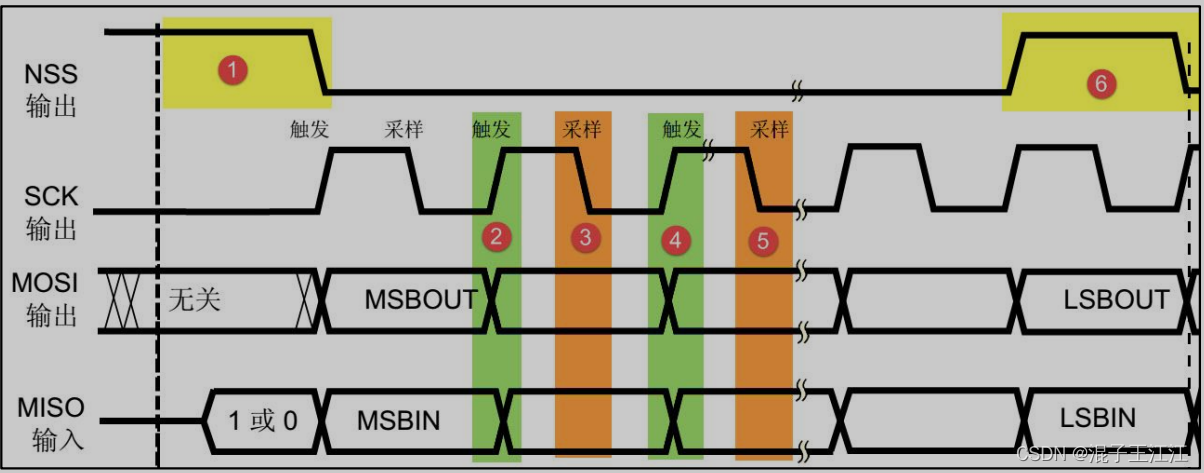
通讯的起始和停止信号
NSS 信号线由高变低,是 SPI 通讯的起始信号。NSS 是每个从机各自独占的信号线,当从机在自己的 NSS 线检测到起始信号后,就知道自己被主机选中了,开始准备与主机通讯。NSS 信号由低变高,是 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
- 数据的有效性
MOSI 及 MISO 的数据在 SCK 的上升沿期间变化输出,在SCK 的下降沿时被采样。即在 SCK 的下降沿时刻MOSI 及 MISO 的数据有效,高电平时表示数据“1”,为低电平时表示数据“0”。在其它时刻,数据无效,MOSI及 MISO 为下一次表示数据做准备。(这只是对上图情况的分析,上图并不是唯一的通讯模式。)
- SPI的四种模式
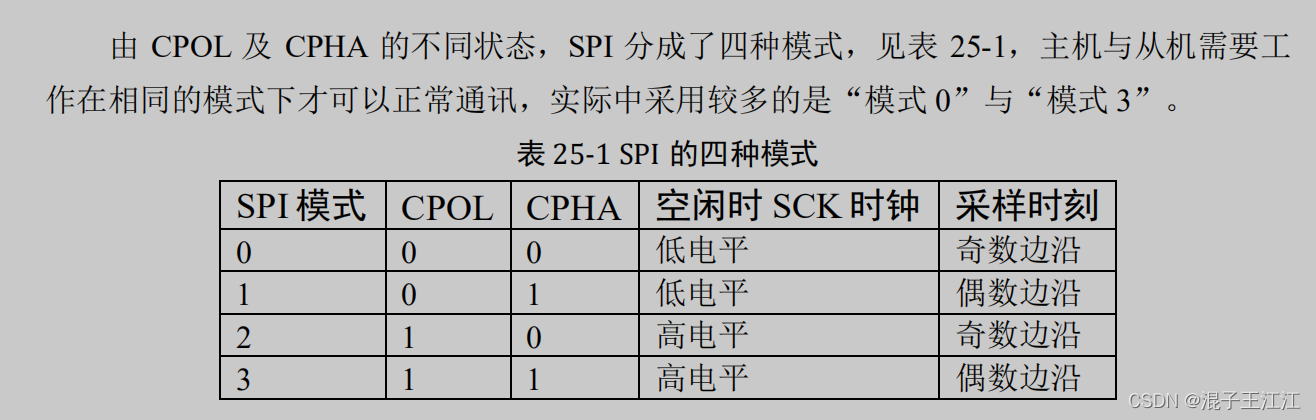
这里知识简单回顾一下大致内容,详细见后面的参考资料。
二、OLED屏显和汉字点阵编码原理
1、汉字点阵编码原理
1、 在汉字的点阵字库中,每个字节的每个位都代表一个汉字的一个点,每个汉字都是由一个矩形的点阵组成,0代表没有,1代表有点,将0和1分别用不同颜色画出,就形成了一个汉字,常用的点阵矩阵有12x12, 14x14, 16x16三种字库。
2、 字库根据字节所表示点的不同有分为横向矩阵和纵向矩阵,目前多数的字库都是横向矩阵的存储方式(用得最多的应该是早期UCDOS字库),纵向矩阵一般是因为有某些液晶是采用纵向扫描显示法,为了提高显示速度,于是便把字库矩阵做成纵向,省得在显示时还要做矩阵转换。我们接下去所描述的都是指横向矩阵字库。
详细-------->汉字点阵原理
2、OLED屏显
OLED(Organic Light Emitting Display,中文名有机发光显示器)是指有机半导体材料和发光材料在电场驱动下,通过载流子注入和复合导致发光的现象。其原理是用ITO透明电极和金属电极分别作为器件的阳极和阴极,在一定电压驱动下,电子和空穴分别从阴极和阳极注入到电子和空穴传输层,电子和空穴分别经过电子和空穴传输层迁移到发光层,并在发光层中相遇,形成激子并使发光分子激发,后者经过辐射弛豫而发出可见光。
来自------->百度百科
三、OLED模块
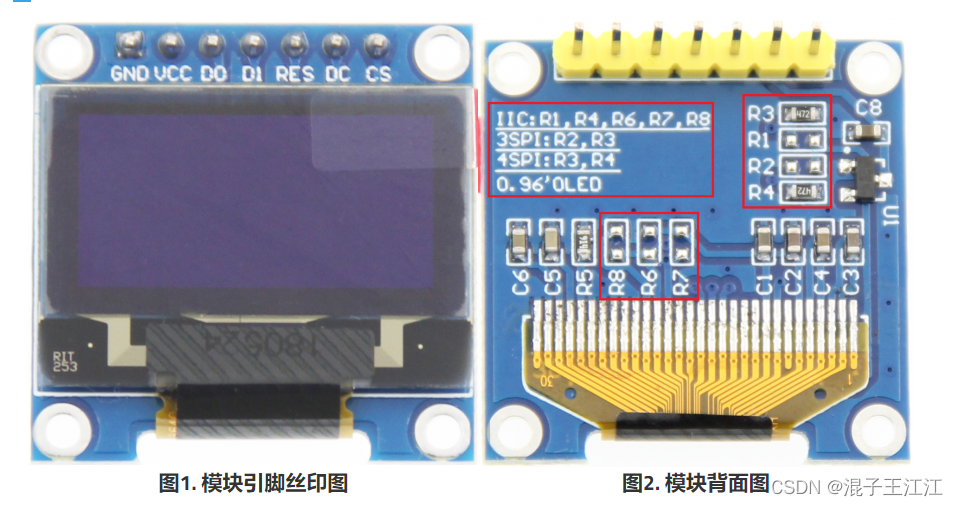
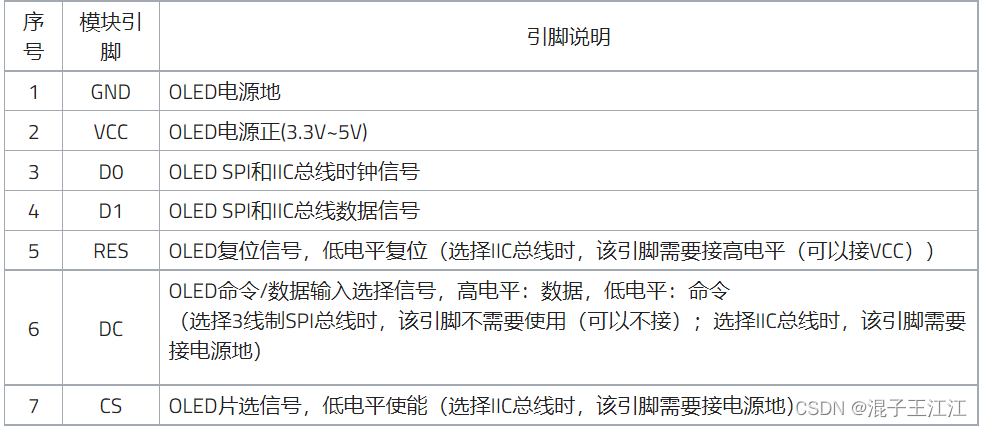
其他版本或详见:http://www.lcdwiki.com/zh/0.96inch_SPI_OLED_Module
四、显示自己的学号和姓名
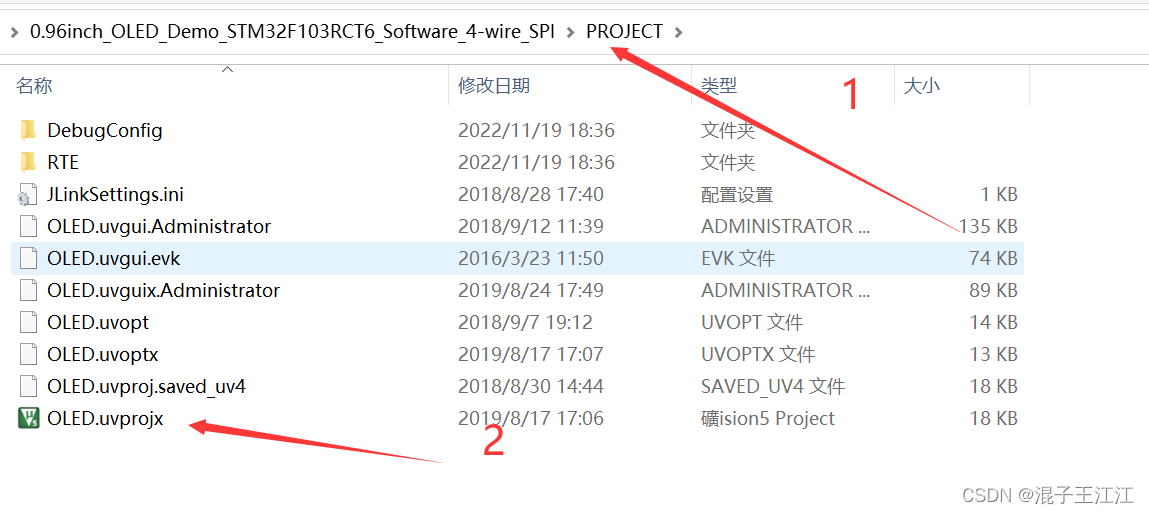
将此次实验所需要的demo下载下来。
- 解压进入到工程目录下,双击文件打开keil进行代码修改
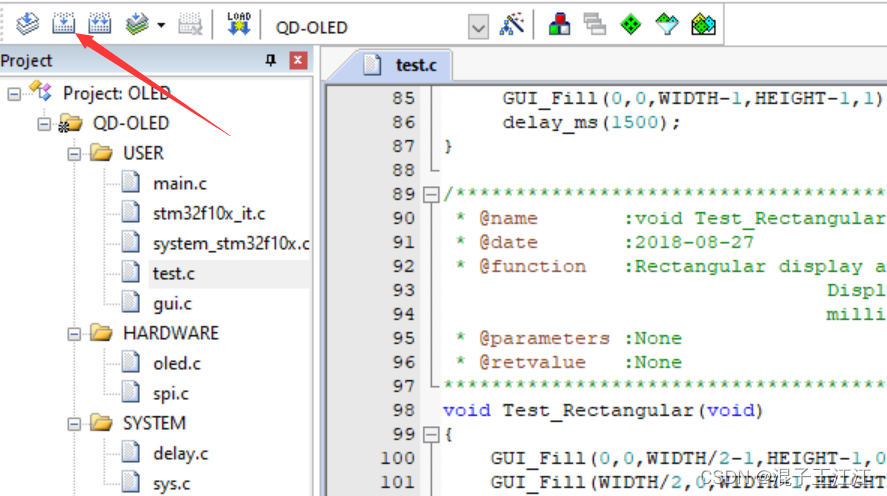
- 编译一次,这样.c文件下的文件才出来
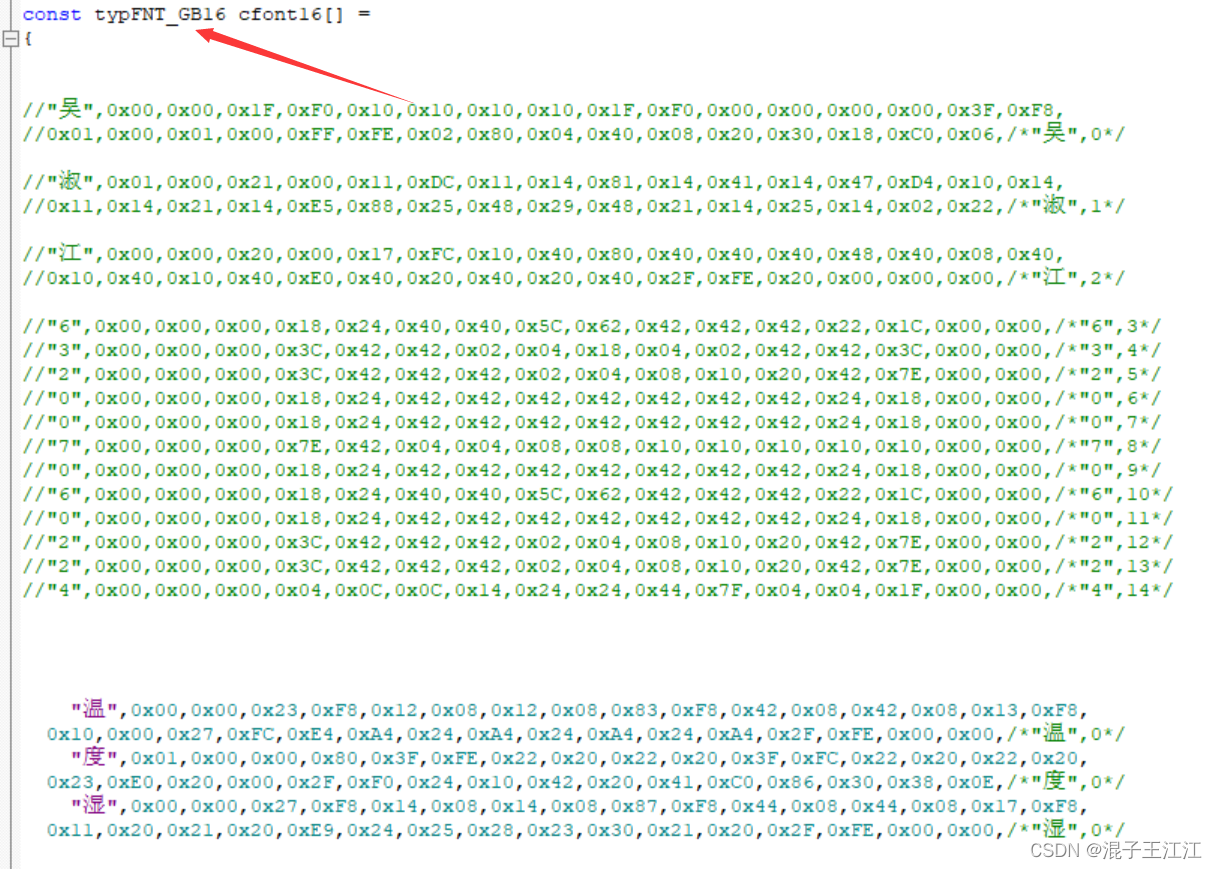
- 通过取字模软件,取到相应的汉字。
设置C51格式

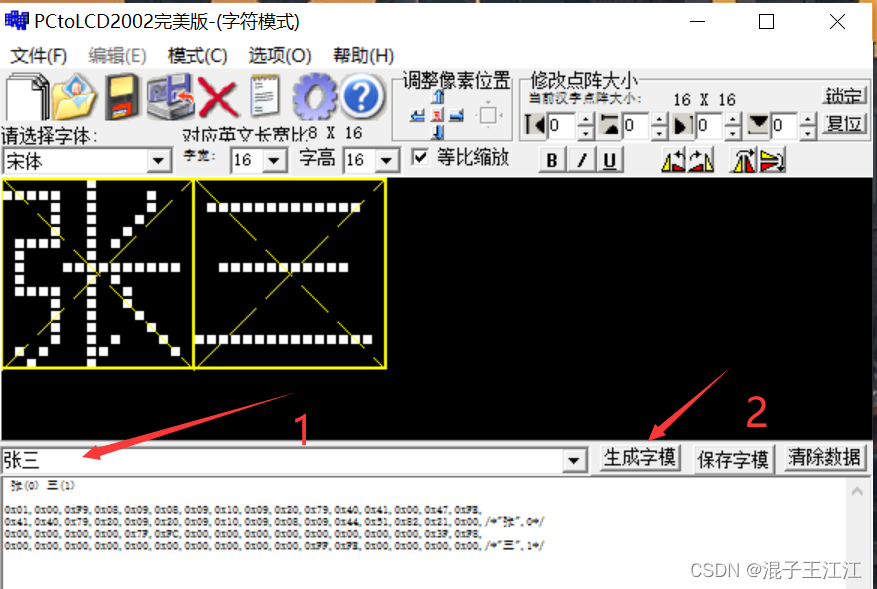
- 将取到的字模复制,放到gui.c下的oledfont.h
在每一个取到的字模前面用英文的引号对真实的字修饰。
- 打开test.c,修改TEST_MainPage函数
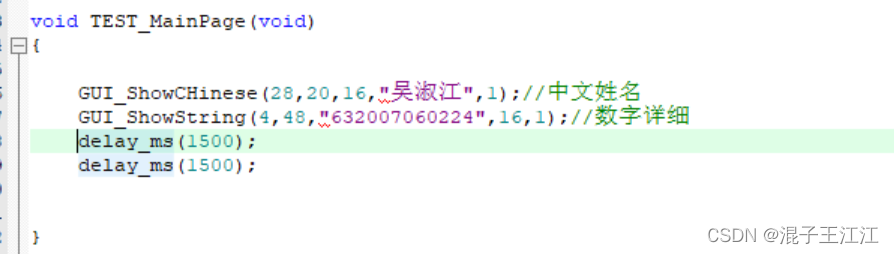
GUI_ShowString() 的参数
参数一:X 坐标
参数二:Y 坐标
参数三:字符串(ASCLL码中的)
参数四:bit (表示字符显示格式,这里我用的 16 ,和汉字一样高)
参数五:显示样式(1:白字黑底;0:黑字白底)
GUI_ShowChinese() 的参数
参数一:X 坐标
参数二:Y 坐标
参数三:汉字点阵大小(这里使用的是 16×16 的,参数应该是 16)
参数四:要显示的汉字
参数五:显示样式(1:白字黑底;0:黑字白底)
- 修改main.c文件的main函数
delay_init(); //延时函数初始化
OLED_Init(); //初始化OLED
OLED_Clear(0); //清屏(全黑)
AHT20_Init();
Delay_1ms(500);
if((AHT20_Read_Status()&0x18)!=0x18)
{
AHT20_Start_Init(); //重新初始化寄存器
Delay_1ms(10);
}
while(1)
{
TEST_MainPage();
}
编译烧录均无问题。
- 效果

五、显示温湿度&滑动显示长字符
这是我上篇没用oled的串口输出温湿度:通过STM32Cube配置完成基于I2C协议的AHT20温湿度传感器的数据采集
- 为了读取温湿度我们需要将温湿度传感器厂商(奥松AHT20)提供的文件进行配置,方便后续调用
-
新建一个AHT20文件夹,在里面创建AHT20-21_DEMO_V1_3.c和AHT20-21_DEMO_V1_3.h两个空白文件。放到下面文件夹中:
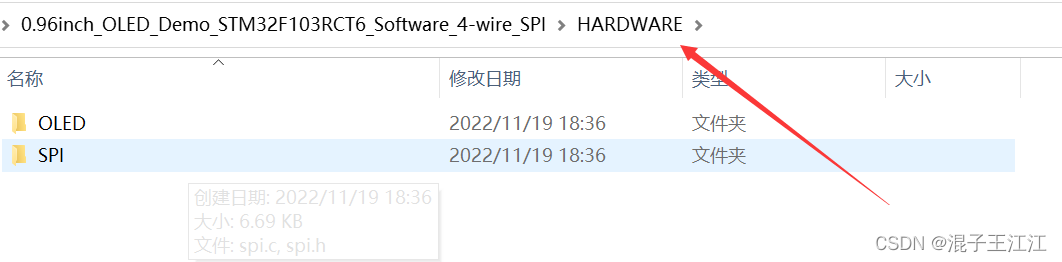
2. 添加文件到项目中
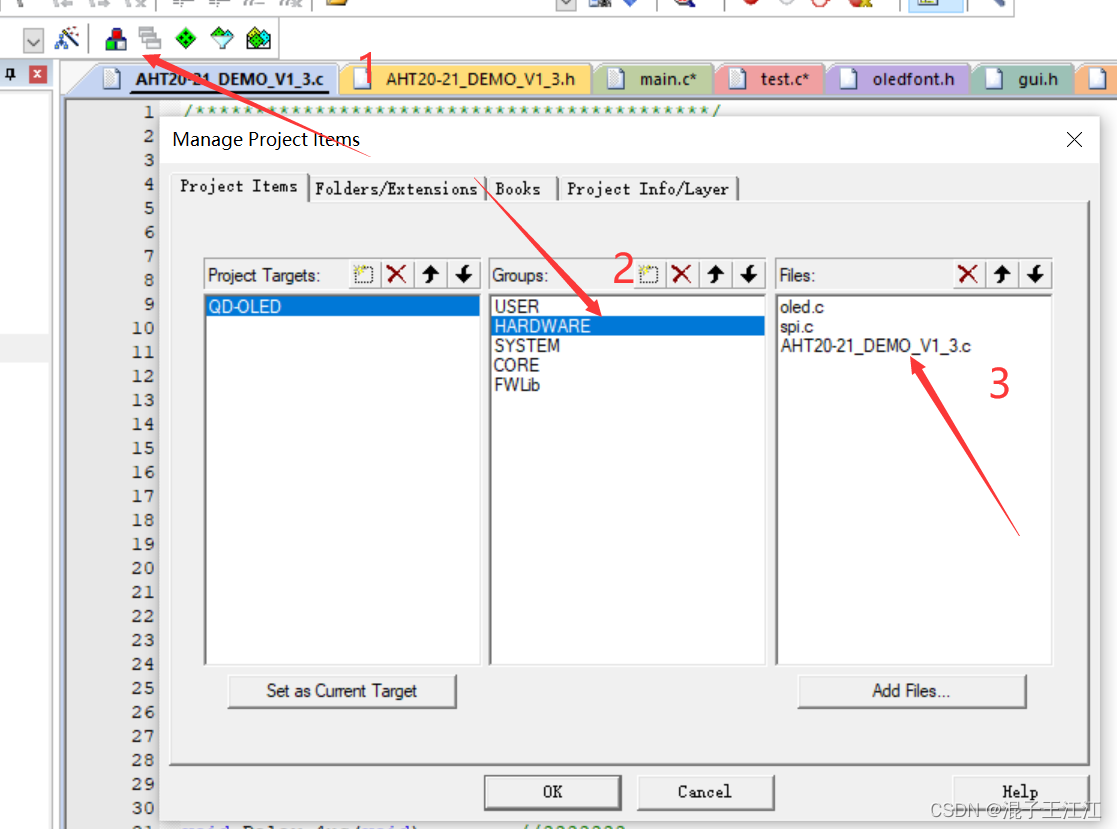
3. 添加文件路径
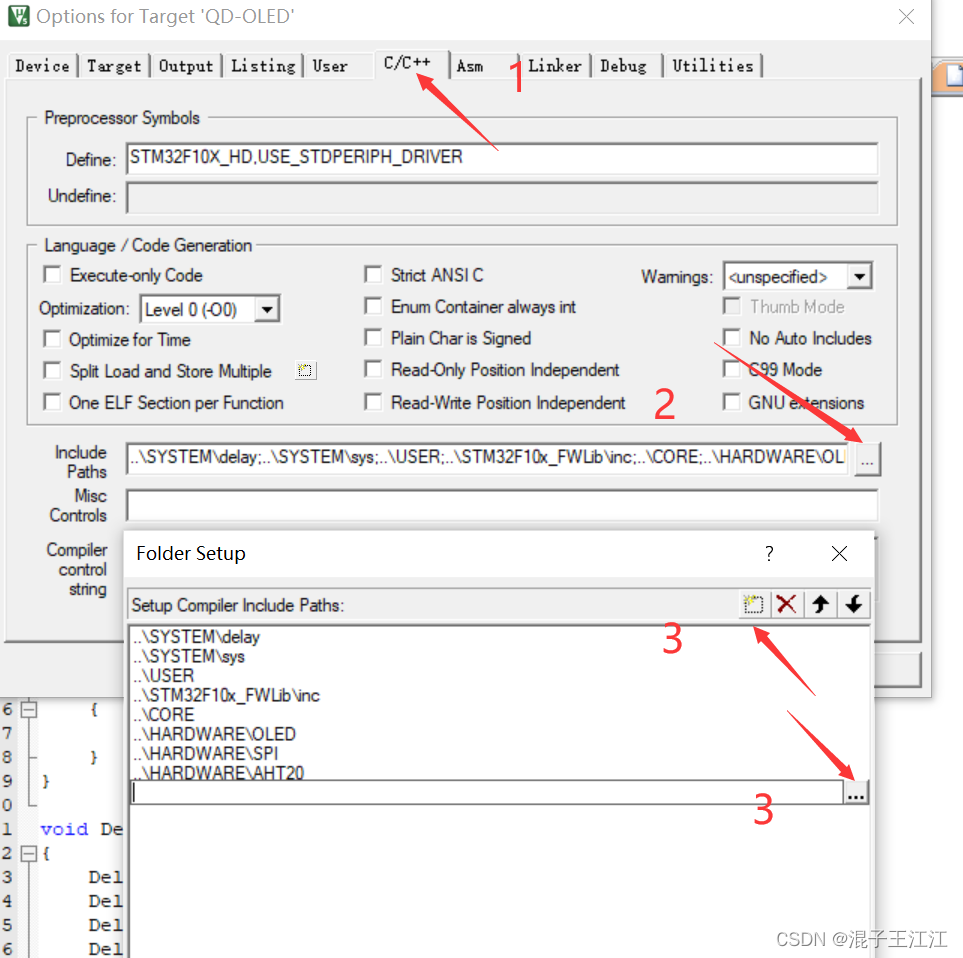
-
写入AHT20-21_DEMO_V1_3.c文件
/*******************************************/
/*@??????У????????????????? */
/*@???????????????????? */
/*@?汾??V1.2 */
/*******************************************/
#include "AHT20-21_DEMO_V1_3.h"
void Delay_N10us(uint32_t t)//???????
{
uint32_t k;
while(t--)
{
for (k = 0; k < 2; k++);//110
}
}
void SensorDelay_us(uint32_t t)//???????
{
for(t = t-2; t>0; t--)
{
Delay_N10us(1);
}
}
void Delay_4us(void) //???????
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_5us(void) //???????
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_1ms(uint32_t t) //???????
{
while(t--)
{
SensorDelay_us(1000);//???1ms
}
}
//void AHT20_Clock_Init(void) //???????
//{
// RCC_APB2PeriphClockCmd(CC_APB2Periph_GPIOB,ENABLE);
//}
void SDA_Pin_Output_High(void) //??PB7???????? ?? ????????????? PB7???I2C??SDA
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//???????
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,& GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_7);
}
void SDA_Pin_Output_Low(void) //??P7???????? ???????????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//???????
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,& GPIO_InitStruct);
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
}
void SDA_Pin_IN_FLOATING(void) //SDA?????????????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB,&GPIO_InitStruct);
}
void SCL_Pin_Output_High(void) //SCL?????????P6???I2C??SCL
{
GPIO_SetBits(GPIOB,GPIO_Pin_6);
}
void SCL_Pin_Output_Low(void) //SCL???????
{
GPIO_ResetBits(GPIOB,GPIO_Pin_6);
}
void Init_I2C_Sensor_Port(void) //?????I2C???,????????
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//???????
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,& GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_15);//???????
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//???????
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,& GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_15);//???????
}
void I2C_Start(void) //I2C????????START???
{
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
}
void AHT20_WR_Byte(uint8_t Byte) //??AHT20д??????
{
uint8_t Data,N,i;
Data=Byte;
i = 0x80;
for(N=0;N<8;N++)
{
SCL_Pin_Output_Low();
Delay_4us();
if(i&Data)
{
SDA_Pin_Output_High();
}
else
{
SDA_Pin_Output_Low();
}
SCL_Pin_Output_High();
Delay_4us();
Data <<= 1;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
uint8_t AHT20_RD_Byte(void)//??AHT20?????????
{
uint8_t Byte,i,a;
Byte = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
for(i=0;i<8;i++)
{
SCL_Pin_Output_High();
Delay_5us();
a=0;
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)) a=1;
Byte = (Byte<<1)|a;
SCL_Pin_Output_Low();
Delay_5us();
}
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
return Byte;
}
uint8_t Receive_ACK(void) //??AHT20????л??ACK
{
uint16_t CNT;
CNT = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
while((GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7)) && CNT < 100)
CNT++;
if(CNT == 100)
{
return 0;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
return 1;
}
void Send_ACK(void) //???????ACK???
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
void Send_NOT_ACK(void) //?????????ACK
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
}
void Stop_I2C(void) //???Э?????
{
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
}
uint8_t AHT20_Read_Status(void)//???AHT20?????????
{
uint8_t Byte_first;
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
return Byte_first;
}
uint8_t AHT20_Read_Cal_Enable(void) //???cal enableλ????????
{
uint8_t val = 0;//ret = 0,
val = AHT20_Read_Status();
if((val & 0x68)==0x08)
return 1;
else return 0;
}
void AHT20_SendAC(void) //??AHT20????AC????
{
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xac);//0xAC???????
Receive_ACK();
AHT20_WR_Byte(0x33);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
}
//CRCУ???????CRC8/MAXIM
//???????X8+X5+X4+1
//Poly??0011 0001 0x31
//??λ?????????? 1000 1100 0x8c
//C???????
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num)
{
uint8_t i;
uint8_t byte;
uint8_t crc=0xFF;
for(byte=0; byte<Num; byte++)
{
crc^=(message[byte]);
for(i=8;i>0;--i)
{
if(crc&0x80) crc=(crc<<1)^0x31;
else crc=(crc<<1);
}
}
return crc;
}
void AHT20_Read_CTdata(uint32_t *ct) //???CRCУ?飬?????AHT20?????????????
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
AHT20_SendAC();//??AHT10????AC????
Delay_1ms(80);//???80ms????
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//?????bit[7]?0?????????????????1????????
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_1th = AHT20_RD_Byte();//?????????????0x98,?????????bit[7]?1?????0x1C??????0x0C??????0x08????????????bit[7]?0
Send_ACK();
Byte_2th = AHT20_RD_Byte();//???
Send_ACK();
Byte_3th = AHT20_RD_Byte();//???
Send_ACK();
Byte_4th = AHT20_RD_Byte();//???/???
Send_ACK();
Byte_5th = AHT20_RD_Byte();//???
Send_ACK();
Byte_6th = AHT20_RD_Byte();//???
Send_NOT_ACK();
Stop_I2C();
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//???
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //???
}
void AHT20_Read_CTdata_crc(uint32_t *ct) //CRCУ??????AHT20?????????????
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
volatile uint8_t Byte_7th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
// uint8_t CRCDATA=0;
uint8_t CTDATA[6]={0};//????CRC????????
AHT20_SendAC();//??AHT10????AC????
Delay_1ms(80);//???80ms????
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//?????bit[7]?0?????????????????1????????
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
CTDATA[0]=Byte_1th = AHT20_RD_Byte();//?????????????0x98,?????????bit[7]?1?????0x1C??????0x0C??????0x08????????????bit[7]?0
Send_ACK();
CTDATA[1]=Byte_2th = AHT20_RD_Byte();//???
Send_ACK();
CTDATA[2]=Byte_3th = AHT20_RD_Byte();//???
Send_ACK();
CTDATA[3]=Byte_4th = AHT20_RD_Byte();//???/???
Send_ACK();
CTDATA[4]=Byte_5th = AHT20_RD_Byte();//???
Send_ACK();
CTDATA[5]=Byte_6th = AHT20_RD_Byte();//???
Send_ACK();
Byte_7th = AHT20_RD_Byte();//CRC????
Send_NOT_ACK(); //???: ????????NAK
Stop_I2C();
if(Calc_CRC8(CTDATA,6)==Byte_7th)
{
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//???
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //???
}
else
{
ct[0]=0x00;
ct[1]=0x00;//У??????????????????????????????
}//CRC????
}
void AHT20_Init(void) //?????AHT20
{
Init_I2C_Sensor_Port();
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xa8);//0xA8????NOR??????
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//???10ms????
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xbe);//0xBE?????????AHT20????????????0xBE, AHT10????????????0xE1
Receive_ACK();
AHT20_WR_Byte(0x08);//???????bit[3]??1???У????
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//???10ms????
}
void JH_Reset_REG(uint8_t addr)
{
uint8_t Byte_first,Byte_second,Byte_third;
I2C_Start();
AHT20_WR_Byte(0x70);//?????0x70
Receive_ACK();
AHT20_WR_Byte(addr);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(5);//???5ms????
I2C_Start();
AHT20_WR_Byte(0x71);//
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_ACK();
Byte_second = AHT20_RD_Byte();
Send_ACK();
Byte_third = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
Delay_1ms(10);//???10ms????
I2C_Start();
AHT20_WR_Byte(0x70);///
Receive_ACK();
AHT20_WR_Byte(0xB0|addr);?????????
Receive_ACK();
AHT20_WR_Byte(Byte_second);
Receive_ACK();
AHT20_WR_Byte(Byte_third);
Receive_ACK();
Stop_I2C();
Byte_second=0x00;
Byte_third =0x00;
}
void AHT20_Start_Init(void)
{
JH_Reset_REG(0x1b);
JH_Reset_REG(0x1c);
JH_Reset_REG(0x1e);
}
- 写入AHT20-21_DEMO_V1_3.h文件
#ifndef _AHT20_DEMO_
#define _AHT20_DEMO_
#include "stm32f10x.h"
void Delay_N10us(uint32_t t);//???????
void SensorDelay_us(uint32_t t);//???????
void Delay_4us(void); //???????
void Delay_5us(void); //???????
void Delay_1ms(uint32_t t);
void AHT20_Clock_Init(void); //???????
void SDA_Pin_Output_High(void) ; //??PB15???????? ?? ????????????? PB15???I2C??SDA
void SDA_Pin_Output_Low(void); //??P15???????? ???????????
void SDA_Pin_IN_FLOATING(void); //SDA?????????????
void SCL_Pin_Output_High(void); //SCL?????????P14???I2C??SCL
void SCL_Pin_Output_Low(void); //SCL???????
void Init_I2C_Sensor_Port(void); //?????I2C???,????????
void I2C_Start(void); //I2C????????START???
void AHT20_WR_Byte(uint8_t Byte); //??AHT20д??????
uint8_t AHT20_RD_Byte(void);//??AHT20?????????
uint8_t Receive_ACK(void); //??AHT20????л??ACK
void Send_ACK(void) ; //???????ACK???
void Send_NOT_ACK(void); //?????????ACK
void Stop_I2C(void); //???Э?????
uint8_t AHT20_Read_Status(void);//???AHT20?????????
uint8_t AHT20_Read_Cal_Enable(void); //???cal enableλ????????
void AHT20_SendAC(void); //??AHT20????AC????
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num);
void AHT20_Read_CTdata(uint32_t *ct); //???CRCУ?飬?????AHT20?????????????
void AHT20_Read_CTdata_crc(uint32_t *ct); //CRCУ??????AHT20?????????????
void AHT20_Init(void); //?????AHT20
void JH_Reset_REG(uint8_t addr);///???ü????
void AHT20_Start_Init(void);///?????????????????????
#endif
- 修改main.c文件
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "gui.h"
#include "test.h"
#include "AHT20-21_DEMO_V1_3.h"
void TEST_MainPage1(int c1,int t1)
{
GUI_ShowCHinese(30,0,16,"月薪过万",1);
GUI_ShowCHinese(5,30,16,"湿度",1);
GUI_ShowCHinese(5,45,16,"温度",1);
GUI_ShowNum(35,30,c1/10,4,16,1);
GUI_ShowNum(35,45,t1/10,4,16,1);
Delay_1ms(1000);
}
volatile int c1,t1;
uint32_t CT_data[2]={0,0};
u8 temp[10];
u8 hum[10];
int main(void)
{
delay_init(); //延时函数初始化
OLED_Init(); //初始化OLED
OLED_Clear(0); //清屏(全黑)
/***********************************************************************************/
/**///①刚上电,产品芯片内部就绪需要时间,延时100~500ms,建议500ms
/***********************************************************************************/
AHT20_Init();
Delay_1ms(500);
/***********************************************************************************/
/**///②上电第一次发0x71读取状态字,判断状态字是否为0x18,如果不是0x18,进行寄存器初始化
/***********************************************************************************/
if((AHT20_Read_Status()&0x18)!=0x18)
{
AHT20_Start_Init(); //重新初始化寄存器
Delay_1ms(10);
}
//NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
OLED_WR_Byte(0x2E,OLED_CMD); //关闭滚动
OLED_WR_Byte(0x27,OLED_CMD); //水平向左或者右滚动 26/27
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0x00,OLED_CMD); //起始页 0
OLED_WR_Byte(0x07,OLED_CMD); //滚动时间间隔
OLED_WR_Byte(0x09,OLED_CMD); //终止页 2
OLED_WR_Byte(0x00,OLED_CMD); //虚拟字节
OLED_WR_Byte(0xFF,OLED_CMD); //虚拟字节
while(1)
{
//AHT20_Read_CTdata(CT_data); //不经过CRC校验,直接读取AHT20的温度和湿度数据 推荐每隔大于1S读一次
AHT20_Read_CTdata_crc(CT_data); //crc校验后,读取AHT20的温度和湿度数据
c1 = CT_data[0]*100*10/1024/1024; //计算得到湿度值c1(放大了10倍)
t1 = CT_data[1]*200*10/1024/1024-500;//计算得到温度值t1(放大了10倍)
TEST_MainPage1(c1,t1); //界面显示
OLED_WR_Byte(0x2F,OLED_CMD); //开启滚动
Delay_1ms(2000);
}
}
在修改main.c时要确定屏幕输出的文字已经进行取模并放置好。然后就是编译、烧录均无问题。
- 效果:
QQ视频20221120184252
六、总结
因为前面都是用的Cube写的,想着用Cube做简单些,做到后面都是问题,像个无头苍蝇一样到处找资料,但是网上资料极少数是用hal库写的,于是兜兜转转又回到了标准库。后面发现我们只是需要在模板上进行适当的增加删除即可,很快就做完了。前面虽然浪费了挺多时间但是在查找资料过程中也学到了许多。对于本次实验主要是复习了SPI协议和汉字点阵的原理及应用。
七、参考资料
https://blog.csdn.net/weixin_51087836/article/details/111488021
https://blog.csdn.net/qq_43279579/article/details/111414037
https://blog.csdn.net/Mouer__/article/details/121515031?spm=1001.2014.3001.5502
![[附源码]计算机毕业设计JAVA基于JSP技术的新电商助农平台](https://img-blog.csdnimg.cn/e1e0e8cd1e9c4d2c904077787f324ed9.png)
![[附源码]计算机毕业设计JAVA基于JSP学生信息管理系统](https://img-blog.csdnimg.cn/b36ea57a8658499baeac5937628e87b1.png)