目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1课题研究背景及其意义 1
1.2三自由度机器人的发展与现状 1
1.3三自由度机器人的原理和介绍 3
1.4三自由度机器人目前存在问题 4
1.5三自由度机器人的力控制问题 4
1.6三自由度机器人的发展趋势 5
第2章 总体技术方案及系统组成 7
2.1原始数据 7
2.2工作要求 7
2.3系统组成 8
2.4总体技术方案 8
2.4.1 动作分析 10
2.4.2 手部 10
第3章 机器人的液压部分 11
3.1液压系统的工作原理 11
3.2液压传动的工作特性 11
3.3液压系统的组成 12
第4章 回转装置的总体设计 14
4.1执行件 14
4.2传递件 14
4.3驱动件 15
4.4控制系统 16
第5章 机械传动方案的设计与计算 17
5.1小车的主要组成部分 17
5.2同步带传动方式优缺点 17
5.3驱动动力源 18
5.4机械传动方案的设计计算 19
5.4.1设计数据确定 19
5.4.2同步带结构的设计计算 21
第6章 零件加工编程 27
6.1数控车床加工程序编制基础 27
6.2程序编制 28
总 结 39
参考文献 40
致 谢 41
第2章 总体技术方案及系统组成
2.1原始数据
负载重量:10kg
重复定位精度:±1mm
自由度:3(Z的移动,R轴的平动,θ轴的转动)
Z:大臂的升降
R:大臂的伸缩
θ:腰轴
各轴最大运动速度:
Z轴上下:200mm/s
θ轴回转:30°/s
R轴伸缩:200mm/s
各轴最大运动范围:
Z轴上下:550mm
θ轴回转:90°
R轴伸缩:400mm
2.2工作要求
机器人的工艺流程:
机器人原位→机器人前伸→机器人上升→机器人抓取并夹紧→机器人后退→机器人前进(小车)→小车停止→机器人左转90°→机器人前伸→机器人松开→机器人后退(小车)→机器人下降→机器人右转90°→小车后退→退至原位
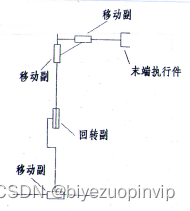
机构简图
2.3系统组成
本基械手系统由机体,传送机构,动力源和控制装置四部分组成。其中机体由小车及本体等部分组成;传送机构主要由伸缩臂及抓紧机构所组成;动力源由液压驱动和机械驱动两种形式构成控制装置主要由自动控制和手动控制两部分组成。
2.4总体技术方案
毕业设计的目的就是要把我们所学的比较分散的知识综合起来,并进行灵活运用。现在的发展趋势是机电一体化,因此,我们的毕业设计是要我们将“机”、“电”、“液”三者合并起来。“机”即是指机械,机器人的动作过程可以分五部分,即机器人的上升下降、机器人的前伸后缩、机器人的加紧放松、机器人的左转右转、小车的前进后退。这五部分中我们靠机械完成机器人的上升下降动作,即本课题所做的机器人采用电动机带动丝杠螺母机构来实现手臂的上升、下降方面。
滚珠螺旋传动是在丝杠和螺母滚道之间放入适量的滚珠,使螺纹间产生滚动摩擦。丝杆传动是带动滚珠沿螺纹轨道滚动。滚珠螺旋传动与滑动螺旋传动或者其他直线运动副相比,有以下特点:
1) 传动效率高 一般滚珠丝杠副的传动效率达85%-98%,为滑动丝杠副的3-4倍。
2) 运动平稳 滚动摩擦系数接近常数,启动与工作摩擦力矩差别很小。启动时无冲击,低速时无爬行。
3) 能源预紧 预紧后可消除间隙产生过盈,提高接触刚度和传动精度。同时增加的摩擦力矩相对不大。
4) 工作寿命长 滚珠丝杠螺母副的摩擦表面为高硬度、高精度,具有较长的工作寿命和精度保持性。寿命约为滑动丝杠副的4-10倍以上.
5) 定位精度和重复定位精度高 由于滚珠丝杠副摩擦小、温升小、无爬行、无间隙,通过预紧进行预拉伸的补偿的膨胀,因此,可以达到较高的定位精度和重复定位精度。
6) 同步性好 用几套相同的滚珠丝杠副同时传动几个相同的运动部件。可以得到较好的同步运动。
7) 可靠性高 润滑密封装置结构简单,维修方便。
8) 不自锁 用于垂直运动,必须在系统中附加自锁或制动装置。
9) 经济性差,成本高 由于结构工艺复杂,故制造成本高价格往往以 mm计。
经过计算,选择如下:
电动机型号: Y802-2
功率: 1.1W
丝杠型号: Tr40×7
2.4.1 动作分析
三自由度机器人的机械机构是指它的执行系统,是机器人抓持工件、进行操作及各种运动的机械部件。机械部件主要包括手部,手臂前后伸缩部分,手臂上下升降部分腰转部分以及机座和行走机构。
2.4.2 手部
手部:包括杠杆手指,单向作用式握紧油缸等。其工作原理:物体进入手指后,拉杆手油缸作用,通过拉杆带动杠杆手指回转,实现握紧或松开动作。
- 手臂的前后伸缩部分
手臂的前后伸缩部分由直线油缸带动实现。
当直线油缸工作时通过活塞杆行程的变化,完成手臂的伸缩运动。 - 手臂的上下升降部分
手臂的上下升降部分是由电动机、丝杆传动副、立柱等部分组成。
当电动机工作时,通过联轴器转动丝杆,由于丝杆螺母周受到立柱的径向转动限制,使得螺母及手臂架只能作上下运动。 - 腰转部分
腰转部分主要由转盘和回转油缸组成。当压力油进入回转油缸时,回转油缸的回转轴回转,通过活塞杆的伸缩带动转盘的转动,从而实现机器人的左右转动, - 行走机构
行走机构主要是由电动机、齿轮、带轮等组成。
当电动机工作时,通过齿轮、带轮的传动,带动小车的轮子转动,从而实现行走。














![[附源码]SSM计算机毕业设计电子病历信息管理系统JAVA](https://img-blog.csdnimg.cn/ef1a6f7297e94e8ba0c7f955cb57666a.png)

![[附源码]java毕业设计四六级考试管理系统](https://img-blog.csdnimg.cn/8bd26e21ce9f4b1f96b83f4f545fcba8.png)