一、可视化数据的基本特点
- 离散性:为了让计算机能够获取、处理和分析数据,必须对无限、连续的空间体进行采样,生成有限的采样数据点,这些数据以离散点的形式存储,采样的过程是一个离散化的过程。
- 数据具有规则或不规则的结构(结构化与非结构化):可视化数据可以分为规则(Regular)和不规则(Irreguar)或者说结构化(Structured)和非结构化(Unstructured)。规则结构数据点之间有固定的关联关系,可以通过这些关联确定每个点的坐标,不规则结构数据之间没有固定的关联关系。
- 数据具有维度:可视化数据具有零维、一维、二维、三维等任意维度
二、数据对象和数据集
1、vtkDataObject
在 VTK 中,数据一般以数据对象(Data Object,类 vtkDataObject)的形式表现,这是VTK 里可视化数据最常用的表达形式。

2、vtkDataSet
VTK里与数据集对应的类是vtkDataSet,该类从vtkDataObject直接派生。
vtkDataSet的组织结构由拓扑结构(Topology)和几何结构(Geometry)两部分组成。拓扑结构描述了对象的构成形式,几何结构描述了对象的空间位置关系。
比如,想要在屏幕上显示一个三角形,首先必须定义三角形三个点的坐标(即Point Data,记三个点为P1、P2和P3),然后将这三个点按照一定的顺序连接起来(P1-P2-P3,或者是P3-P2-P1的顺序),这三个点定义了数据集的几何结构,它们的连接就构成了数据集的拓扑结构,亦即点数据定义了数据集的几何结构,单元数据定义数据集的拓扑结构,要形成完整的数据集,必须有几何和拓扑两种结构。
拓扑结构具有几何变换不变性(旋转、平移和放缩),属性数据是对拓扑结构和几何结构信息的补充,属性数据可以是某个空间点的温度值,也可以是某个单元的质量等。

示例代码:
//创建三个坐标点
vtkSmartPointer<vtkPoints> points = vtkSmartPointer<vtkPoints>::New();
points->InsertNextPoint ( 1.0, 0.0, 0.0 ); //返回第一个点的ID:0
points->InsertNextPoint ( 0.0, 0.0, 1.0 ); //返回第二个点的ID:1
points->InsertNextPoint ( 0.0, 0.0, 0.0 ); //返回第三个点的ID:2
//每两个坐标点之间分别创建一条线
//SetId()的第一个参数是线段的端点ID,第二个参数是连接的点的ID
vtkSmartPointer<vtkLine> line0 = vtkSmartPointer<vtkLine>::New();
line0->GetPointIds()->SetId ( 0,0 );
line0->GetPointIds()->SetId ( 1,1 );
vtkSmartPointer<vtkLine> line1 = vtkSmartPointer<vtkLine>::New();
line1->GetPointIds()->SetId ( 0,1 );
line1->GetPointIds()->SetId ( 1,2 );
vtkSmartPointer<vtkLine> line2 = vtkSmartPointer<vtkLine>::New();
line2->GetPointIds()->SetId ( 0,2 );
line2->GetPointIds()->SetId ( 1,0 );
//创建Cell数组,用于存储以上创建的线段
vtkSmartPointer<vtkCellArray> lines = vtkSmartPointer<vtkCellArray>::New();
lines->InsertNextCell ( line0 );
lines->InsertNextCell ( line1 );
lines->InsertNextCell ( line2 );
vtkSmartPointer<vtkPolyData> polydata = vtkSmartPointer<vtkPolyData>::New();
//将点和线加入到数据集中,前者指定数据集的几何,后者指定其拓扑
polydata->SetPoints ( points );
polydata->SetLines ( lines );
vtkSmartPointer<vtkPolyDataWriter> writer = vtkSmartPointer<vtkPolyDataWriter>::New();
writer->SetFileName ( "TriangleLines.vtk" );
writer->SetInputData ( polydata );
writer->Write();
三、单元类型
数据集由一个或多个单元组成。一系列有序的点按指定类型连接所定义的结构就是单元(Cell),单元是VTK可视化系统的基础。
1、线性单元
| 类型 | 图示 | 说明 |
|---|---|---|
| VTK_VERTEX |
| 顶点,由一个点定义,是零维的基本类型 |
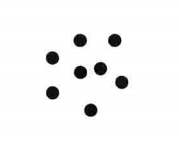
| VTK_POLY_VERTEX |
| 多顶点,多个顶点组合而成,是零维的组合单元,其定义不受顶点顺序的限制 |
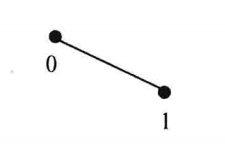
| VTK_LINE |
| 直线,一维的基本类型,由两个点定义,方向是从第一个点指向第二个点 |
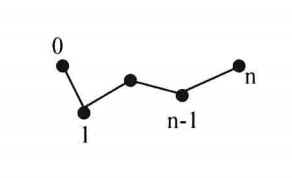
| VTK_POLY_LINE |
| 折线,由一个或多个线段组合成,一维的类型。由n+1个有序的点连接定义的,n表示折线的线段条数,每两个点(i, i+1)定义一条线段 |
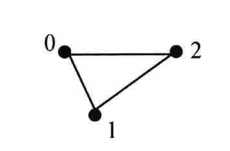
| VTK_TRIANGLE |
| 三角形,二维的基本类型,由三个点按逆时针的方向连接定义,点的连接方向和表面法向量符合右手法则 |
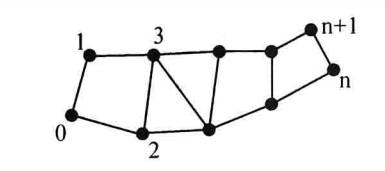
| VTK_TRIANGLE_STRIP |
| 三角形条带,由一个或多个三角形组合而成,二维类型。由n+2个有序的点连接定义的,n表示三角形条带里三角形的个数,定义三角形条带的点不需要共面。 |
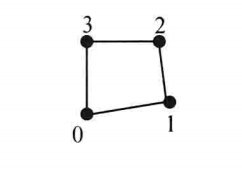
| VTK_QUAD |
| 四边形,二维的基本类型,是由共面的四个点按逆时针的方向连接定义的。四边形要求是非自交的凸多边形,利用右手法则可以得到改四边形的表面法向量 |
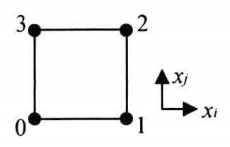
| VTK_PIXEL |
| 二维的基本类型,是由共面的四个点按一定的顺序连接定义的。该类型的单元与四边形的区别在拓扑结构上,Pixel类型要求相邻的两条边必须垂直,而且相对的两条边要与坐标轴平行,因此Pixel的表面法向量也与其中的一条坐标轴平行。定义Pixel的四个顶点的顺序与四边形不同,Pixel顶点的计数是先沿着X轴的方向,然后是Y轴,最后是Z轴方向。Pixel是四边形类型的特殊形式,注:Pixel是一种单元类型,与图像像素(Pixel)的概念不同 |
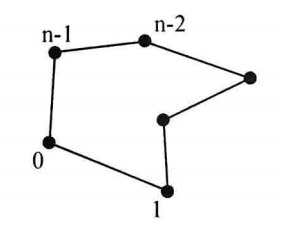
| VTK_POLYGON |
| 多边形,二维的基本类型,是由共面的三个或三个以上的点按逆时针方向的顺序连接定义的,多边形的表面法向量方向由右手法则确定。该类型要求多边形可以是非凸的,但是不能含有内部循环或者出现相交的边。多边形有n条边,n就是组成多边形的点的个数。 |
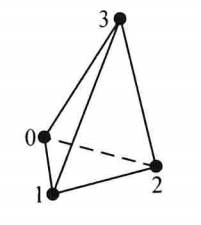
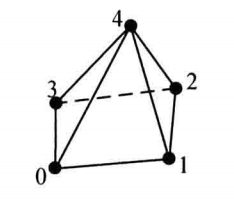
| VTK_TETRA |
| 四面体,三维的基本类型,是由不共面的四个点两两连接定义的,四面体有6条边4个面 |
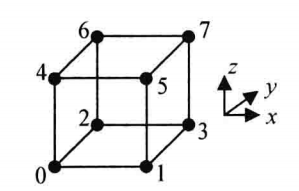
| VTK_HEXAHEDRON |
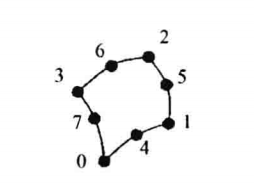
| 六面体,三维的基本类型,包含六个四边形表面、12条边和8个顶点,顶点连接顺序如图,六面体要求必须是凸的 |
| VTK_VOXEL |
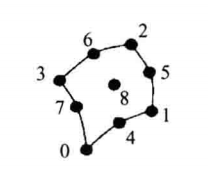
| 三维的基本类型,与六面体的拓扑不一样,但几何上有所区别。Voxel要求相邻的两个面必须垂直,点的连接顺序如图。Voxel是六面体的特殊形式。与Pixel类似,Voxel与三维图像体素的概念是不同的 |
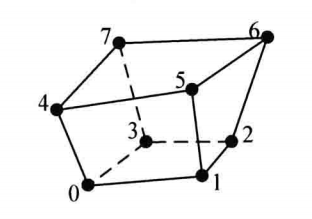
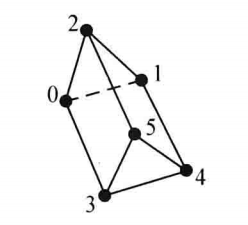
| VTK_WEDGE |
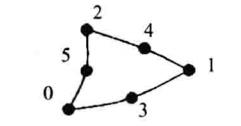
| 楔形,三维的基本类型,由3个四边形面、2个三角形面、9条边和6个顶点构成。六个点的连接顺序如图,要求面和边不能与其他的相交,且楔形必须是凸的 |
| VTK_PYRAMID |
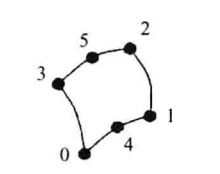
| 角锥体,三维基本类型,由1个四边形面、4个三角形面、8条边和5个顶点构成。构成角锥体的点的连接顺序如图。定义四边形的点要求是共面的,且四个点构成的四边形必须是凸的,第五个点与其他四个点不在一个面上 |
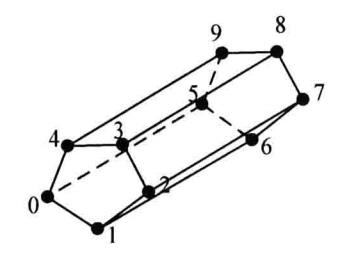
| VTK_PENTAGONAL_PRISM |
| 五棱柱,三维基本类型,由五个四边形面、两个五边形面、15条边和10个顶点构成。点的连接顺序如图,五棱柱的面和边不能与其他的相交且五棱柱必须是凸的 |
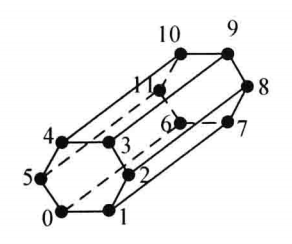
| VTK_HEXAGONAL_PRISM |
| 六角柱,三维基本类型,由6个四边形面、两个六边形面、18条边和12个顶点构成。点的连接顺序如图,六角柱的面和边不能与其他的相交且六角柱必须是凸的 |

2、非线性单元
| 类型 | 图示 | 说明 |
|---|---|---|
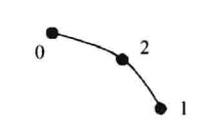
| VTK_QUADRATIC_EDGE |
| 二次曲线,一维基本类型,由三个点定义,其中前两个点分别对应曲线的端点,第三个点位于曲线的中间位置,曲线的方向是由第一个点指向第二个点 |
| VTK_QUADRATIC_TRIANGLE |
| 二次三角形,二维的基本类型之一,由六个点定义,其中前三个点对应三角形的三个顶点,另外三点分别对应三条边的中点 |
| VTK_QUADRATIC_ LINEAR_QUAD |
| 二次线性四边形,二维的基本类型之一,由六个点定义,其中前四个点对应四边形顶点,另外两个点位于第一和第三条边的中点处 |
| VTK_QUADRATIC_QUAD |
| 二次四边形,二维的基本类型之一,由八个点定义,其中前四个点对应四个顶点,后四点分别对应四条边的中点 |
| VTK_BIQUADRATIC_QUAD |
| 双二次四边形,二维的基本类型之一,由九个点定义,其中前四个点对应四个顶点,后四点分别对应四条边的中心,最后一个点位于该二次四边形的中心位置 |
| VTK_QUADRATIC_TETRA |
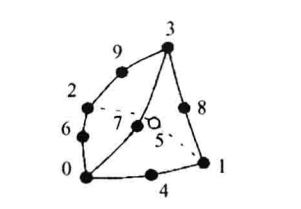
| 二次四面体,三维的基本类型之一,由10个点定义,其中前四个点对应四面体的四个顶点,其余六个点分别对应六条边的中点 |
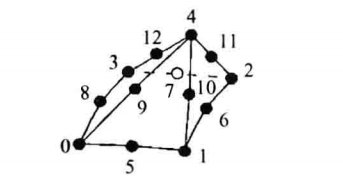
| VTK_QUADRATIC_PYRAMID |
| 二次角锥体,三维的基本类型之一,由13个点定义,其中前五个点对应角锥体的五个顶点,其余八个点分别对应八条边的中点 |
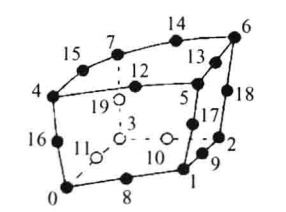
| VTK_QUADRATIC_ HEXAHEDRON |
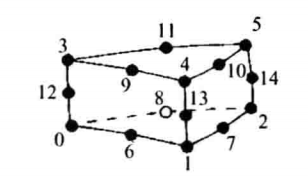
| 二次六面体,三维的基本类型之一,由20个点定义,其中前八个点对应六面体的八个顶点,其余12个点分别对应12条边的中点 |
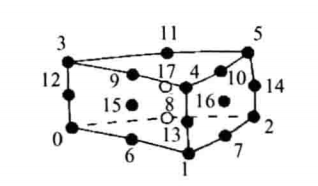
| VTK_BIQUADRATIC_ QUADRATIC_HEXAHEDRON |
| 双二次六面体,三维的基本类型之一,由24个点定义,其中前八个点对应六面体的八个顶点,其余12个点分别对应12条边的中点,最后4个点位于前4面的中心位置 |
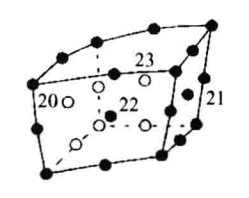
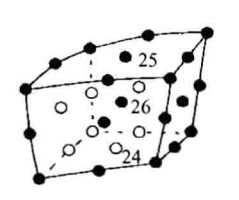
| VTK_TRIQUADRATIC_ HEXAHEDRON |
| 三次六面体,三维的基本类型之一,由27个点定义,其中前八个点对应六面体的八个顶点,其余12个点分别对应12条边的中点,另外6个点位于6个面的中心位置,最后一个点位于六面体的中心 |
| VTK_QUADRATIC_ LINEAR_WEDGE |
| 二次线性楔形体,三维的基本类型之一,由12个点定义,其中前六个点对应楔形体的六个顶点,其余六个点分别对应组成上下面两个面的三角形边的中点 |
| VTK_QUADRATIC_WEDGE |
| 二次楔形体,三维的基本类型之一,由15个点定义,其中前六个点对应楔形体的六个顶点,其余九个点分别对应九条边的中点 |
| VTK_BIQUADRATIC_ QUADRATIC_WEDGE |
| 双二次楔形体,三维的基本类型之一,由18个点定义,其中前六个点对应楔形体的六个顶点,九个点分别对应九条边的中点,最后三个点位于每个二次曲面的中心位置 |

四、数据属性
属性数据(Attribute Data)是与数据集组织结构相关联的信息。

1、标量数据
标量数据是数据集里的每个位置具有单值的数据,它只表示数据的大小,例如温度、压力、密度、高度等。标量数据是最简单也是最普遍的可视化数据。
2、矢量数据
与物理学的矢量概念一样,VTK的矢量数据也是指既有大小也有方向的量,三维方向上用三元组(Triple)表示为(u,v,w),如速度、应力、位移等。
3、纹理坐标
为了使物体看起来更加真实,计算机图形学通常对显示的三维物体采用纹理映射。纹理坐标可以将点从笛卡儿坐标空间映射到一维、二维或三维的纹理空间中。
4、张量数据
张量是矢量和矩阵通过复杂的数学算法得到的,一个k阶的张量可当作一个k维的表格。零阶的张量是标量,一阶的张量是矢量,二阶的张量是纹理坐标,三阶的张量是一个三维阵列 。
五、不同类型的数据集
1、vtklmageData
vtkImageData 类型的数据是按规则排列在矩形方格中的点和单元的集合。
2、vtkPolyData
多边形数据集 vtkPolyData由顶点(Vertex)、多顶点(Polyvertex)、线(Line)、折线(Polyline)和三角形条带(Triangle Strip)等单元构成,多边形数据是不规则结构的,并且多边形数据集的单元在拓扑维度上有多种类型。
3、vtkRectilinearGrid
vtkRectilinearGrid 类型的数据是排列在矩形方格中的点和单元的集合。
4、vtkStructuredGrid
vtkStructuredGrid 是结构化网格数据,具有规则的拓扑结构和不规则的几何结构,但是单元没有重叠或交叉。
5、vtkUnstructuredGrid
vtkUnstructuredGrid 是非结构化网格,是最常见的数据集类型,它的拓扑结构和几何结构都是非结构化的,在此数据集中,所有单元类型都可以组成任意组合,所有单元的拓扑结构从零维延伸至三维。
6、vtkUnstructuredPoints
vtkUnstructuredPoints 为非结构化点集,是指不规则地分布在空间的点集。非结构化点集具有不规则的几何结构,不具有拓扑结构,非结构化点集用离散点来表达。

六、数据的存储与表达
1、vtkDataArray
VTK 中的内存分配采用连续内存,可以快速地创建、删除和遍历,称之为数据数组(DataArray),用类 vtkDataArray 实现。数组数据的访问是基于索引的,与C++一样,从零开始计数。

2、数据对象的表达
VTK 里的数据对象是作为vtkDataArray的数组(即数据数组的数组)实现的。vtkDataObiect是一种通用的可视化数据的表达,可视化算法基本都没有直接处理vtkDataObiect 类型的数据,在处理某一类数据时,一般都要求数据内部具有某种组织结构。vtkDataObiect 内部封装了与可视化管线的执行相关的变量和方法,包括表达数据。在vtkDataObiect 内部有一个 vkFieldData(场数据)的实例,负责对数据的表达。场数据可以看作数据数组的数组,数组里的每一个元素都是一个数组,数组的类型、长度、元组的大小和名称等都可以各不相同。




















