目录
二叉搜索树
1. 概念
2. 二叉搜索树操作
2.1 基础结构
2.2 非递归版
1. 查找
2. 插入
3. 删除
2.3 递归版
1. 查找
2. 插入
3. 删除
2.4 拷贝构造函数
2.5 赋值运算符重载
2.6 析构函数
2.7 完整代码
3. 二叉搜索树的应用
4. 二叉搜索树的性能
二叉搜索树
1. 概念
二叉搜索树又称二叉排序树,它或者是一棵空树,或者是具有以下性质的二叉树:
- 若它的左子树不为空,则左子树上所有节点的值都小于根节点的值
- 若它的右子树不为空,则右子树上所有节点的值都大于根节点的值
- 它的左右子树也分别为二叉搜索树
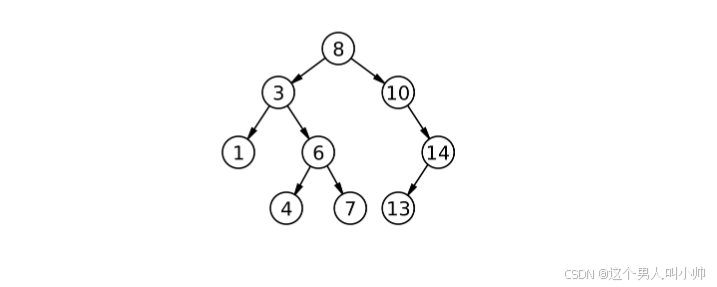
由于二叉搜索树的性质,该树的中序遍历就是递增序列
2. 二叉搜索树操作
2.1 基础结构
template<class K>
struct BSTreeNode
{
BSTreeNode<K>* _left;
BSTreeNode<K>* _right;
K _key;
BSTreeNode(const K& key)
:_key(key)
, _left(nullptr)
, _right(nullptr)
{}
};
template<class K>
class BSTree
{
typedef BSTreeNode<K> Node;
public:
BSTree()
:_root(nullptr)
{}
private:
Node* _root;
};
2.2 非递归版
1. 查找
- key小于cur->_key,则往左子树找
- key大于cur->_key,则往右子树找
bool Find(const K& key)
{
Node* cur = _root;
while (cur)
{
if (cur->_key > key)
{
cur = cur->_left;
}
else if (cur->_key < key)
{
cur = cur->_right;
}
else
{
return true;
}
}
return false;
}2. 插入
- 插入要先找到合适的空位
- 如果已经之前已经存在,那么return false
- 找到空位之后,new出一个新节点,在链接时我们要获取parent节点,这就需要我们提前记录parent节点
- 链接时还要判断 key 与 parent->_key大小关系,因为我们找到了合适的位置,但是没有记录是在左还是在右
bool Insert(const K& key)
{
//如果树为空,直接new一个根节点
if (_root == nullptr)
{
_root = new Node(key);
return true;
}
//记录父节点,最后链到父节点
Node* parent = nullptr;
Node* cur = _root;
//找到合适的空位置
while (cur)
{
if (cur->_key < key)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_key > key)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
//由于不知道插入的节点与父亲的key大小关系,所以再判断一下是插到左边还是右边
cur = new Node(key);
if (parent->_key < key)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
return true;
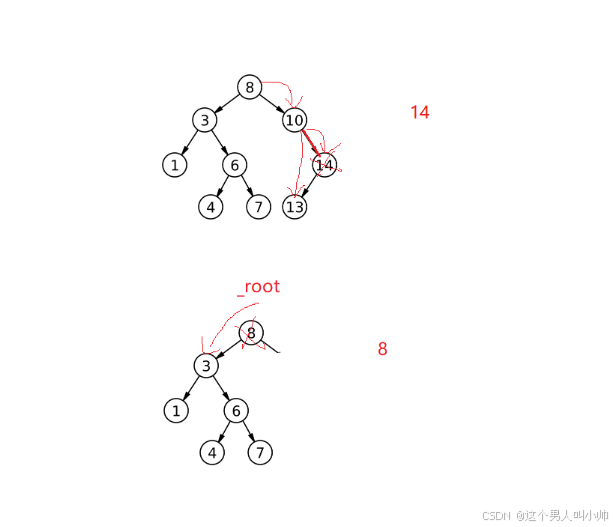
}3. 删除
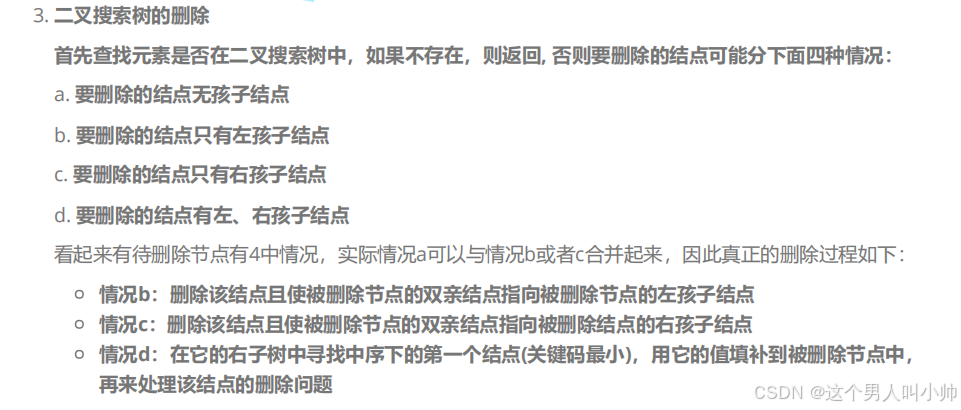
- 先查找该节点是否存在,如果存在,再看以下几点
- 删除节点情况分三种:该节点左孩子为空、该节点右孩子为空、该节点左右孩子都有
- 左孩子为空:将右节点链接到parent上即可,此时还要判断cur在parent的哪一边,如果cur在parent的右边,那么cur的所有孩子必然比parent的key大,所以将cur的right链接到parent的right即可
- 右孩子为空:同理
- 左右孩子都存在:此时我们可以找该节点左子树的最右节点,或右子树的最左节点,这两个节点都是最接近根节点key值的节点(因为二叉搜索树的性质,当节点无穷时,这两个节点的key值将从左和从右边无限趋近于根节点的key值),找到节点后与根节点交换key值,此时如果是左子树的最右节点,那么该节点是绝不可能存在右子树,所以此时将该节点的左子树链接到parent节点即可(提前记录parent,在判断cur在parent的哪一边)
- 最后不要忘了delete被删除的节点
bool Erase(const K& key)
{
Node* parent = nullptr;
Node* cur = _root;
//先看看能不能找到这个节点
while (cur)
{
if (cur->_key < key)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_key > key)
{
parent = cur;
cur = cur->_left;
}
else //找到节点了
{
//该节点左为空
if (cur->_left == nullptr)
{
if (cur == _root)
{
_root = cur->_right;
}
else //再看看cur在父节点parent的哪一边,在哪一边就把孤儿链接到哪一边
{
if (parent->_right == cur)
{
parent->_right = cur->_right;
}
else
{
parent->_left = cur->_right;
}
}
}
else if (cur->_right == nullptr) //该节点右为空
{
if (cur == _root)
{
_root = cur->_left;
}
else
{
if (parent->_right == cur)
{
parent->_right = cur->_left;
}
else
{
parent->_left = cur->_left;
}
}
}
else //该节点左右都不为空
{
Node* parent = cur;
Node* leftMax = cur->_left;
while (leftMax->_right)
{
parent = leftMax;
leftMax = leftMax->_right;
}
swap(leftMax->_key, cur->_key);
if (parent->_left == leftMax)
{
parent->_left = leftMax->_left;
}
else
{
parent->_right = leftMax->_left;
}
cur = leftMax;
}
delete cur;
return true;
}
}
return false;
}2.3 递归版
由于用户不传递root参数,所以FindR内层封装一个获取root参数的函数,其他函数同理
1. 查找
- 如果找不到返回false,找到了返回true。比key小,往右子树递归找;比key大,往左子树递归找。
bool FindR(const K& key)
{
return _FindR(_root, key);
}
bool _FindR(Node* root, const K& key)
{
if (root == nullptr)
return false;
if (root->_key < key)
{
return _FindR(root->_right, key);
}
else if (root->_key > key)
{
return _FindR(root->_left, key);
}
else
{
return true;
}
}2. 插入
- insert函数神之一手的地方就是参数类型 Node*&,当它递归下去时 root 其实是它的父节点的 left 或 right 的引用!它可以不用提前保存parent的信息,直接链接新节点!
bool InsertR(const K& key)
{
return _InsertR(_root, key);
}
//Node*& root,这里的引用是神之一手,因为在连接的时候可以不用再去记录parent
//在链接的时候,那个root是引用的父亲的root->_right或root->_left !!
bool _InsertR(Node*& root, const K& key)
{
if (root == nullptr)
{
//这个root是引用的父亲的root->_right或root->_left,这一步是直接链接了!
root = new Node(key);
return true;
}
if (root->_key < key)
{
return _InsertR(root->_right, key);
}
else if (root->_key > key)
{
return _InsertR(root->_left, key);
}
else
{
//已经有该节点了,返回false
return false;
}
}3. 删除
- 先找到要删除的节点,然后再提前保存该节点,为了后续的delete
- 同样的,erase的参数也是Node*&,它极大方便了节点的链接
- 找到节点后,如果该节点的左节点为空,那么直接root = root->_right;如果右节点为空,那么 root = root->_left,这就是Node* &的强大之处。那么可能有疑问,非递归版本为什么不能用引用?循环版本不能使用引用,是因为引用不能改变指向!递归可以使用引用是因为每次都是一个新的栈帧
- 如果左右节点都存在,找左子树最右节点,交换key值,再erase掉key的节点(注意,不能从root开始找,因为root此时已经被交换key值了,递归会往右边去找,这就会导致找错了
- 最后Erase()这里不能传leftMax->_left,因为leftMax是局部变量,最后子节点会链接不上真正的root
bool EraseR(const K& key)
{
return _EraseR(_root, key);
}
bool _EraseR(Node*& root, const K& key)
{
if (root == nullptr)
return false;
if (root->_key < key)
{
return _EraseR(root->_right, key);
}
else if (root->_key < key)
{
return _EraseR(root->_left, key);
}
else //找到了,开始删除
{
//提前记录
Node* del = root;
//左为空
if (root->_left == nullptr)
{
root = root->_right;
}
//右为空
else if (root->_right == nullptr)
{
root = root->_left;
}
//左右都不为空
else
{
Node* leftMax = root->_left;
while (leftMax->_right)
{
leftMax = leftMax->_right;
}
swap(leftMax->_key, root->_key);
//这里不能传leftMax->_left,因为是别名,leftMax是局部变量,最后子节点会链接不上真正的root
return _EraseR(root->_left, key);
}
delete del;
return true;
}
}2.4 拷贝构造函数
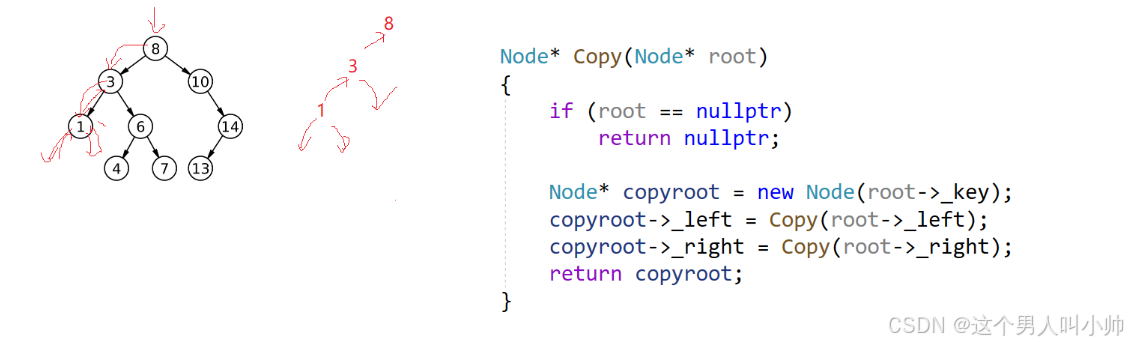
- 根据前序序列递归拷贝
- 该递归就是从最左边开始链接,再从最底层往上
BSTree(const BSTree<K>& t)
{
_root = Copy(t._root);
}
Node* Copy(Node* root)
{
//前序遍历拷贝
if (root == nullptr)
return nullptr;
Node* copyroot = new Node(root->_key);
copyroot->_left = Copy(root->_left);
copyroot->_right = Copy(root->_right);
return copyroot;
}2.5 赋值运算符重载
- 现代写法
BSTree<K>& operator=(BSTree<K> t)
{
swap(_root, t._root);
return *this;
}2.6 析构函数
- 递归式析构
~BSTree()
{
Destory(_root);
}
void Destory(Node*& root)
{
if (root == nullptr)
return;
Destory(root->_left);
Destory(root->_right);
delete root;
root = nullptr;
}2.7 完整代码
namespace key
{
template<class K>
struct BSTreeNode
{
BSTreeNode<K>* _left;
BSTreeNode<K>* _right;
K _key;
BSTreeNode(const K& key)
:_key(key)
, _left(nullptr)
, _right(nullptr)
{}
};
template<class K>
class BSTree
{
typedef BSTreeNode<K> Node;
public:
BSTree()
:_root(nullptr)
{}
BSTree(const BSTree<K>& t)
{
_root = Copy(t._root);
}
BSTree<K>& operator=(BSTree<K> t)
{
swap(_root, t._root);
return *this;
}
~BSTree()
{
Destory(_root);
}
bool Insert(const K& key)
{
//如果树为空,直接new一个根节点
if (_root == nullptr)
{
_root = new Node(key);
return true;
}
//记录父节点,最后链到父节点
Node* parent = nullptr;
Node* cur = _root;
//找到合适的空位置
while (cur)
{
if (cur->_key < key)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_key > key)
{
parent = cur;
cur = cur->_left;
}
else
{
return false;
}
}
//由于不知道插入的节点与父亲的key大小关系,所以再判断一下是插到左边还是右边
cur = new Node(key);
if (parent->_key < key)
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
return true;
}
bool Find(const K& key)
{
Node* cur = _root;
while (cur)
{
if (cur->_key > key)
{
cur = cur->_left;
}
else if (cur->_key < key)
{
cur = cur->_right;
}
else
{
return true;
}
}
return false;
}
bool Erase(const K& key)
{
Node* parent = nullptr;
Node* cur = _root;
//先看看能不能找到这个节点
while (cur)
{
if (cur->_key < key)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_key > key)
{
parent = cur;
cur = cur->_left;
}
else //找到节点了
{
//该节点左为空
if (cur->_left == nullptr)
{
if (cur == _root)
{
_root = cur->_right;
}
else //再看看cur在父节点parent的哪一边,在哪一边就把孤儿链接到哪一边
{
if (parent->_right == cur)
{
parent->_right = cur->_right;
}
else
{
parent->_left = cur->_right;
}
}
}
else if (cur->_right == nullptr) //该节点右为空
{
if (cur == _root)
{
_root = cur->_left;
}
else
{
if (parent->_right == cur)
{
parent->_right = cur->_left;
}
else
{
parent->_left = cur->_left;
}
}
}
else //该节点左右都不为空
{
Node* parent = cur;
Node* leftMax = cur->_left;
while (leftMax->_right)
{
parent = leftMax;
leftMax = leftMax->_right;
}
swap(leftMax->_key, cur->_key);
if (parent->_left == leftMax)
{
parent->_left = leftMax->_left;
}
else
{
parent->_right = leftMax->_left;
}
cur = leftMax;
}
delete cur;
return true;
}
}
return false;
}
void InOrder()
{
_InOrder(_root);
cout << endl;
}
bool FindR(const K& key)
{
return _FindR(_root, key);
}
bool InsertR(const K& key)
{
return _InsertR(_root, key);
}
bool EraseR(const K& key)
{
return _EraseR(_root, key);
}
private:
Node* Copy(Node* root)
{
//前序遍历拷贝
if (root == nullptr)
return nullptr;
Node* copyroot = new Node(root->_key);
copyroot->_left = Copy(root->_left);
copyroot->_right = Copy(root->_right);
return copyroot;
}
void Destory(Node*& root)
{
if (root == nullptr)
return;
Destory(root->_left);
Destory(root->_right);
delete root;
root = nullptr;
}
bool _EraseR(Node*& root, const K& key)
{
if (root == nullptr)
return false;
if (root->_key < key)
{
return _EraseR(root->_right, key);
}
else if (root->_key < key)
{
return _EraseR(root->_left, key);
}
else //找到了,开始删除
{
//提前记录
Node* del = root;
//左为空
if (root->_left == nullptr)
{
root = root->_right;
}
//右为空
else if (root->_right == nullptr)
{
root = root->_left;
}
//左右都不为空
else
{
Node* leftMax = root->_left;
while (leftMax->_right)
{
leftMax = leftMax->_right;
}
swap(leftMax->_key, root->_key);
//这里不能传leftMax->_left,因为是别名,leftMax是局部变量,最后子节点会链接不上真正的root
return _EraseR(root->_left, key);
}
delete del;
return true;
}
}
//Node*& root,这里的引用是神之一手,因为在连接的时候可以不用再去记录parent
//在链接的时候,那个root是引用的父亲的root->_right或root->_left !!
bool _InsertR(Node*& root, const K& key)
{
if (root == nullptr)
{
//这个root是引用的父亲的root->_right或root->_left,这一步是直接链接了!
root = new Node(key);
return true;
}
if (root->_key < key)
{
return _InsertR(root->_right, key);
}
else if (root->_key > key)
{
return _InsertR(root->_left, key);
}
else
{
//已经有该节点了,返回false
return false;
}
}
bool _FindR(Node* root, const K& key)
{
if (root == nullptr)
return false;
if (root->_key < key)
{
return _FindR(root->_right, key);
}
else if (root->_key > key)
{
return _FindR(root->_left, key);
}
else
{
return true;
}
}
void _InOrder(Node* root)
{
if (root == NULL)
{
return;
}
_InOrder(root->_left);
cout << root->_key << " ";
_InOrder(root->_right);
}
private:
Node* _root;
};
void TestBSTree1()
{
int a[] = { 8, 3, 1, 10, 6, 4, 7, 14, 13 };
BSTree<int> t;
for (auto e : a)
{
t.Insert(e);
}
t.InOrder();
t.EraseR(4);
t.InOrder();
t.EraseR(6);
t.InOrder();
t.EraseR(7);
t.InOrder();
t.EraseR(3);
t.InOrder();
for (auto e : a)
{
t.Erase(e);
}
t.InOrder();
}
}3. 二叉搜索树的应用
1. K模型:K模型即只有key作为关键码,结构中只需要存储Key即可,关键码即为需要搜索到的值。
比如:给一个单词word,判断该单词是否拼写正确,具体方式如下:
- 以单词集合中的每个单词作为key,构建一棵二叉搜索树
- 在二叉搜索树中检索该单词是否存在,存在则拼写正确,不存在则拼写错误。
2. KV模型:每一个关键码key,都有与之对应的值Value,即<Key, Value>的键值对。该种方式在现实生活中非常常见:比如英汉词典就是英文与中文的对应关系,通过英文可以快速找到与其对应的中文,英文单词与其对应的中文<word, chinese>就构成一种键值对;再比如统计单词次数,统计成功后,给定单词就可快速找到其出现的次数,单词与其出现次数就是<word, count>就构成一种键值对。
比如:实现一个简单的英汉词典dict,可以通过英文找到与其对应的中文,具体实现方式如下:
- <单词,中文含义>为键值对构造二叉搜索树,注意:二叉搜索树需要比较,键值对比较时只比较
- Key查询英文单词时,只需给出英文单词,就可快速找到与其对应的key
namespace key_value
{
template<class K, class V>
struct BSTreeNode
{
BSTreeNode<K, V>* _left;
BSTreeNode<K, V>* _right;
K _key;
V _value;
BSTreeNode(const K& key, const V& value)
:_left(nullptr)
, _right(nullptr)
, _key(key)
, _value(value)
{}
};
template<class K, class V>
class BSTree
{
typedef BSTreeNode<K, V> Node;
public:
BSTree()
:_root(nullptr)
{}
void InOrder()
{
_InOrder(_root);
cout << endl;
}
Node* FindR(const K& key)
{
return _FindR(_root, key);
}
bool InsertR(const K& key, const V& value)
{
return _InsertR(_root, key, value);
}
bool EraseR(const K& key)
{
return _EraseR(_root, key);
}
private:
bool _EraseR(Node*& root, const K& key)
{
if (root == nullptr)
return false;
if (root->_key < key)
{
return _EraseR(root->_right, key);
}
else if (root->_key > key)
{
return _EraseR(root->_left, key);
}
else
{
Node* del = root;
// 1、左为空
// 2、右为空
// 3、左右都不为空
if (root->_left == nullptr)
{
root = root->_right;
}
else if (root->_right == nullptr)
{
root = root->_left;
}
else
{
Node* leftMax = root->_left;
while (leftMax->_right)
{
leftMax = leftMax->_right;
}
swap(root->_key, leftMax->_key);
return _EraseR(root->_left, key);
}
delete del;
return true;
}
}
bool _InsertR(Node*& root, const K& key, const V& value)
{
if (root == nullptr)
{
root = new Node(key, value);
return true;
}
if (root->_key < key)
{
return _InsertR(root->_right, key, value);
}
else if (root->_key > key)
{
return _InsertR(root->_left, key, value);
}
else
{
return false;
}
}
Node* _FindR(Node* root, const K& key)
{
if (root == nullptr)
return nullptr;
if (root->_key < key)
{
return _FindR(root->_right, key);
}
else if (root->_key > key)
{
return _FindR(root->_left, key);
}
else
{
return root;
}
}
void _InOrder(Node* root)
{
if (root == NULL)
{
return;
}
_InOrder(root->_left);
cout << root->_key << ":" << root->_value << endl;
_InOrder(root->_right);
}
private:
Node* _root;
};
void TestBSTree1()
{
//BSTree<string, Date> carTree;
BSTree<string, string> dict;
dict.InsertR("insert", "插入");
dict.InsertR("sort", "排序");
dict.InsertR("right", "右边");
dict.InsertR("date", "日期");
string str;
while (cin >> str)
{
BSTreeNode<string, string>* ret = dict.FindR(str);
if (ret)
{
cout << ret->_value << endl;
}
else
{
cout << "无此单词" << endl;
}
}
}
void TestBSTree2()
{
// 统计水果出现的次数
string arr[] = { "西瓜", "西瓜", "苹果", "西瓜", "苹果", "苹果", "西瓜", "苹果", "香蕉", "苹果", "香蕉" };
BSTree<string, int> countTree;
for (auto& str : arr)
{
auto ret = countTree.FindR(str);
if (ret == nullptr)
{
countTree.InsertR(str, 1);
}
else
{
ret->_value++;
}
}
countTree.InOrder();
}
}相比只有key版本,key_value只是在结构体内多加了value而已,部分函数原理也没有变
4. 二叉搜索树的性能
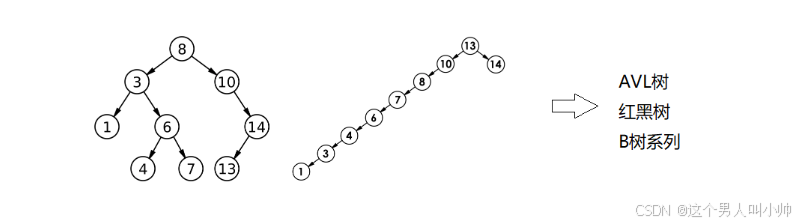
插入和删除操作都必须先查找,查找效率代表了二叉搜索树中各个操作的性能。
对有n个结点的二叉搜索树,若每个元素查找的概率相等,则二叉搜索树平均查找长度是结点在二叉搜索树的深度的函数,即结点越深,则比较次数越多。
但对于同一个关键码集合,如果各关键码插入的次序不同,可能得到不同结构的二叉搜索树: