论文阅读:MonoScene: Monocular 3D Semantic Scene Completion
Abstract
MonoScene提出了一个3D语义场景完成(SSC)框架,其中场景的密集几何形状和语义是从单个单目 RGB 图像中推断出来的。与SC文献不同,我们依靠2.5或3D输入,解决了2D到3D场景重建的复杂问题,同时联合推断其语义。我们的框架依赖于连续的2D和3D UNets,通过受光学启发的新型2D 3D特征投影来连接,并在强制执行空间语义一致性之前引入3D上下文关系。除了建筑贡献之外,我们还介绍了新颖的全局场景和local frustums 损失。实验表明,我们在所有指标和数据集上的表现都优于文献,同时甚至在相机视野之外也会产生看似合理的场景。我们的代码和经过训练的模型可在https://github.com/cv-rits/MonoScene上获取。
3. Method
三维语义场景补全( 3D Semantic Scene Completion,SSC )旨在通过预测标签 C = { c 0 , c 1 , … , c M } C=\{c_0,c_1,\ldots,c_M\} C={c0,c1,…,cM},即自由类 c 0 c_0 c0 和 M M M 个语义类,来联合推断三维场景( y ^ \hat{y} y^ )的几何和语义。这几乎完全由2.5 D或3D输入来解决[ 56 ],例如点云、深度或其他,它们充当强几何线索。
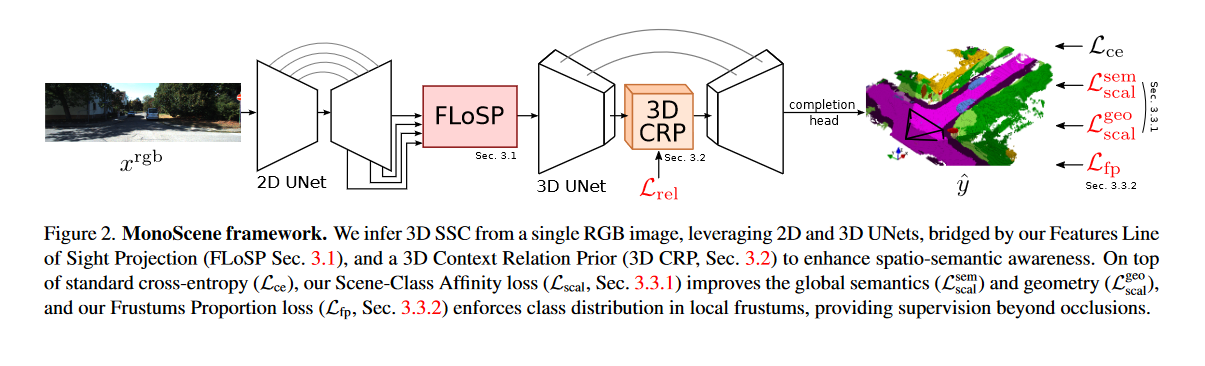
取而代之的是,MonoScene从单幅RGB图像 x r g b x^{rgb} xrgb中求解体素级SSC,学习 y ^ = f ( x r g b ) \hat{y} = f(x^{\mathrm{rgb}}) y^=f(xrgb) 。这显然是困难的,因为从2D恢复3D是很复杂的。在图2中,我们的流水线使用2D和3D UNets,由我们的特征视线投影模块( FLoSP , Sec。3.1 )桥接,将2D特征提升到合理的3D位置,这促进了信息流,并实现了2D - 3D解耦。受[ 71 ]的启发,我们在3D编码器和解码器之间插入3D Context Relation Prior组件( 3D CRP , Sec . 3.2 )来捕获长距离语义上下文。为了指导SSC训练,我们引入了新的补充损失。首先,场景类亲和性损失( Sec.3.3.1 )优化了类内和类间的场景度量。其次,Frustum Proportion Loss ( Sec.3.3.2 )在局部锥台中对齐类分布,提供了场景遮挡之外的监督。
2D - 3D backbond。我们依靠连续的具有标准跳跃连接的2D和3D UNet。2D UNet基于预训练的EfficientNetB7 [ 61 ],将图像 x r g b x^{rgb} xrgb 作为输入。3D UNet是一个2层的自定义浅层编码器解码器。SSC输出 y ^ \hat{y} y^ 是通过处理3D UNet输出特征得到的,我们的完井头带有一个3D ASPP [ 7 ]块和一个softmax层。
3.1. Features Line of Sight Projection (FLoSP)
将2D提升到3D是众所周知的不适定问题,因为单视点的尺度模糊[ 22 ]。我们从光学和背面投射多尺度2D特征推理出所有可能的3D对应关系,即沿着它们的光学射线,聚集在一个独特的3D表示中。我们的直觉是,用3D网络处理后者将从2D特征的集合中提供指导。我们的投影机制与文献[ 52 ]类似,但后者将每个2D地图投影到给定的3D地图- -作为2D - 3D跳跃连接。相反,我们的组件通过将多尺度2D特征提升到单个3D特征图来桥接2D和3D网络。我们认为这使得2D - 3D解耦表示成为可能,为3D网络提供了使用高级2D特征进行细粒度3D的自由
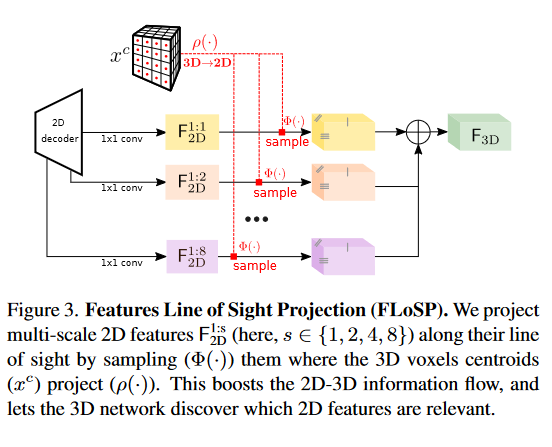
我们的过程如图3所示。在实际应用中,假设相机内参数已知,我们将3D体素质心(
x
c
x^c
xc )投影到2D,并从尺度为
1
:
s
1:s
1:s的2D解码器特征图
F
2
D
1
:
s
\mathsf{F^{1:s}_{2D}}
F2D1:s 中采样相应的特征。重复所有尺度
S
S
S 下的过程,写出最终的三维特征图
F
3
D
\mathsf{F_{3D}}
F3D
F
3
D
=
∑
s
∈
S
Φ
ρ
(
x
c
)
(
F
2
D
1
:
s
)
,
\mathsf{F_{3D}}=\sum_{s\in S}\Phi_{\rho(x^{\mathrm{c}})}(\mathsf{F_{2D}^{1:s}}) ,
F3D=s∈S∑Φρ(xc)(F2D1:s),
其中
Φ
a
(
b
)
\Phi_a(b)
Φa(b) 是
b
b
b 在坐标
a
a
a 处的采样
ρ
(
⋅
)
\rho(\cdot)
ρ(⋅)是透视投影.在实际应用中,我们从尺度
S
=
{
1
,
2
,
4
,
8
}
S = \{ 1,2,4,8 \}
S={1,2,4,8}中选择背面投射(backproject),并在采样前在二维地图上应用1x1 conv进行求和。投射到图像外部的体素其特征向量设置为0。输出图
F
3
D
\mathsf{F_{3D}}
F3D 作为3D UNet输入。
3.2. 3D Context Relation Prior (3D CRP)
由于SSC高度依赖于上下文[ 56 ],我们从CPNet [ 71 ]中得到启发,证明了二进制上下文先验对于二维分割的好处。在这里,我们提出了一个3D上下文关系先验( 3D Context Relation Prior,3D CRP )层,插入到3D UNet瓶颈处,该层学习n - way体素-体素语义场景关系图。这给网络提供了一个全局感受野,并由于关系发现机制增加了空间语义感知。
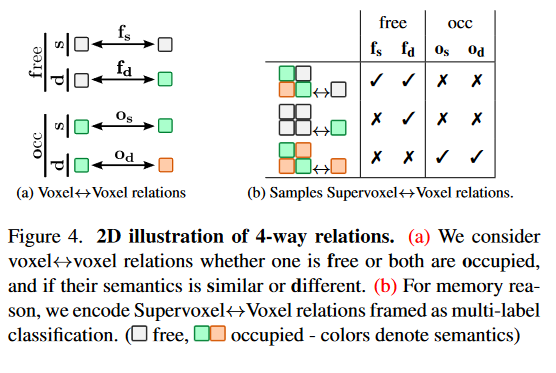
由于SSC是一个高度不平衡的任务,像文献[ 71 ]那样学习二进制(即n = 2 )关系是次优的。取而代之的是考虑n = 4个双侧体素的体素-体素关系,分组为空闲和占用,分别对应"至少一个体素空闲"和"两个体素都占用"。对于每个组,我们对体素语义类是否相似或不同进行编码,得到4个不重叠的关系: M = { f s , f d , o s , o d } \mathcal{M}=\{\mathbf{f_s,f_d,o_s,o_d}\} M={fs,fd,os,od}。图4a展示了2D (颜色含义见标题)中的关系。
由于体素关系与 N N N 个体素的 N 2 N^2 N2 关系是贪婪的,我们提出了更轻的超体素关系。
Supervoxel↔Voxel relation. 我们将超体素定义为每个
s
3
s^3
s3 个相邻体素的非重叠组,并学习更小的超体素-体素关系矩阵,其大小为
N
2
s
3
\frac{N^{2}}{s^{3}}
s3N2。考虑一个超体素
V
\mathcal{V}
V 有体素
{
ν
1
,
…
,
ν
s
3
}
\{\nu_{1},\ldots,\nu_{s^{3}}\}
{ν1,…,νs3} 和一个体素
ν
\nu
ν,存在
s
3
s^3
s3 对关系
{
ν
1
↔
ν
,
…
,
ν
s
3
↔
ν
}
\{\nu_{1}\leftrightarrow\nu,\ldots,\nu_{s^{3}}\leftrightarrow\nu\}
{ν1↔ν,…,νs3↔ν}。我们不是回归V Particiv中M关系的复杂计数,而是预测存在哪些M关系,如图4 b所示。这写道,
V
↔
ν
=
{
ν
1
↔
ν
,
…
,
ν
s
3
↔
ν
}
≠
\mathcal{V}\leftrightarrow\nu=\{\nu_1\leftrightarrow\nu,\ldots,\nu_{s^3}\leftrightarrow\nu\}_{\neq}
V↔ν={ν1↔ν,…,νs3↔ν}=
其中
{
⋅
}
≠
\{\cdot\}\neq
{⋅}= 返回集合的不同元素。
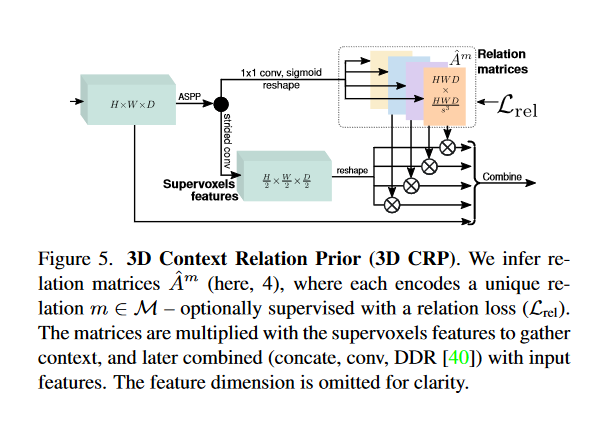
3D Context Relation Prior Layer. 图5说明了我们层的架构。它将空间维度 H × W × D H\times W \times D H×W×D 的3D地图作为输入,在其上应用一系列ASPP卷积[7]以收集大的感受野,然后分裂成 n = ∣ M ∣ n=|\mathcal{M}| n=∣M∣ 大小为 H W D × H W D s 3 HWD\times\frac{HWD}{s^{3}} HWD×s3HWD 的矩阵。
每个矩阵
A
^
m
\hat{A}^{m}
A^m 编码一个关系
m
∈
M
m{\in}M
m∈M ,由其基本真值
A
m
A^{m}
Am 监督。然后,我们优化加权多标签二进制交叉熵损失:
L
r
e
l
=
−
∑
m
∈
M
,
i
[
(
1
−
A
i
m
)
log
(
1
−
A
^
i
m
)
+
w
m
A
i
m
log
A
^
i
m
]
\mathcal{L}_{rel}=-\sum_{m\in\mathcal{M},i}[(1-A_{i}^{m})\log(1-\hat{A}_{i}^{m})+w_{m}A_{i}^{m}\log\hat{A}_{i}^{m}]
Lrel=−m∈M,i∑[(1−Aim)log(1−A^im)+wmAimlogA^im]
其中
i
i
i 循环通过关系矩阵的所有元素,并且
w
m
=
∑
i
(
1
−
A
i
m
)
∑
i
A
i
m
w_{m}=\frac{\sum_{i}(1-A_{i}^{m})}{\sum_{i}A_{i}^{m}}
wm=∑iAim∑i(1−Aim)。关系矩阵与重塑的超体素特征相乘以收集全球上下文。