秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转
💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡
专栏目录: 《YOLOv5入门 + 改进涨点》专栏介绍 & 专栏目录 |目前已有70+篇内容,内含各种Head检测头、损失函数Loss、Backbone、Neck、NMS等创新点改进
Transformers在视觉任务上表现出色,但扩大感受野会带来计算成本和注意力分散的问题。为此,文章介绍了一种可变形自注意力模块,它能根据数据选择关键位置,专注于相关区域。可变形注意力Transformers是适用于图像分类和密集预测的通用模型。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。以帮助您更好地学习深度学习目标检测YOLO系列的挑战。
专栏地址: YOLOv5改进+入门——持续更新各种有效涨点方法 点击即可跳转
目录
1. 原理
2. 将C3_DAttention添加到yolov8网络中
2.1 C3_DAttention 代码实现
2.2 新增yaml文件
2.3 注册模块
2.4 执行程序
3. 完整代码分享
4. GFLOPs
5. 进阶
6. 总结
1. 原理

论文地址:Vision Transformer with Deformable Attention——点击即可跳转
官方代码: 官方代码仓库——点击即可跳转
可变形注意力 (DA) 是对 Transformers 中传统自注意力机制的增强,旨在提高其灵活性和效率,特别是在视觉任务中。以下是对其主要原理的解释:
Transformers,尤其是 Vision Transformers (ViTs),由于其能够对长距离依赖关系进行建模,在各种视觉识别任务中表现出巨大的潜力。然而,Transformers 中的标准注意力机制在计算上可能很昂贵,并且还可能关注不相关的区域,尤其是当接受域太大时。为了解决这个问题,可变形注意力引入了一种机制,可以更有效地将注意力集中在输入的相关部分。
可变形注意力的关键原理
数据依赖注意力:
-
Transformers 中的传统注意力机制通常与数据无关,这意味着无论具体输入如何,它们都会应用相同的注意力模式。然而,可变形注意力以数据依赖的方式选择键和值的位置。这使得模型能够根据正在处理的图像或数据的具体内容,动态地关注输入中最相关的区域。
可变形采样:
-
受 CNN 中使用的可变形卷积网络 (DCN) 的启发,可变形注意力将可变形采样的概念引入自注意力机制。该模型不是统一地关注所有可能的位置,而是学习调整键和值位置的偏移量,有效地变形注意力模式以更好地捕捉重要特征。
偏移学习:
-
可变形注意力的核心创新是偏移量的学习。对于每个查询,都会学习一个偏移量,它会移动键和值的位置。此偏移量由以查询特征为输入的轻量级网络生成。由此产生的变形位置使注意力机制能够关注特征图中更具信息量的部分。
效率和灵活性:
-
通过将注意力集中在更小、更相关的位置集上,与传统的密集注意力相比,可变形注意力减少了计算负担。此外,它保持了灵活性,因为注意力模式可以适应不同的输入,而不是固定不变。
实际实施:
-
在实践中,可变形注意力使用双线性插值从特征图上的变形位置采样特征。这使得该机制保持可区分性并无缝集成到训练过程中。整体结构类似于多头注意力,但由于可变形采样而增加了灵活性。
在视觉变换器中的应用
可变形注意力在视觉任务中特别有用,其中模型需要关注图像的特定区域。可变形注意力变换器 (DAT) 利用这种机制,通过更高效和更好地捕捉重要的视觉特征,超越了 Swin Transformer 等其他模型。
结论
可变形注意力机制增强了传统的自注意力机制,使其更加高效和适应性强。它允许 Transformers 动态地关注输入的相关区域,从而降低计算成本并提高视觉任务的性能。
2. 将C3_DAttention添加到yolov8网络中
2.1 C3_DAttention 代码实现
关键步骤一: 将下面的代码粘贴到\yolov5\models\common.py中
import einops
from timm.models.layers import trunc_normal_
import numpy as np
class LayerNormProxy(nn.Module):
def __init__(self, dim):
super().__init__()
self.norm = nn.LayerNorm(dim)
def forward(self, x):
x = einops.rearrange(x, 'b c h w -> b h w c')
x = self.norm(x)
return einops.rearrange(x, 'b h w c -> b c h w')
class DAttention(nn.Module):
# Vision Transformer with Deformable Attention CVPR2022
# fixed_pe=True need adujust 640x640
def __init__(
self, channel, q_size, n_heads=8, n_groups=4,
attn_drop=0.0, proj_drop=0.0, stride=1,
offset_range_factor=4, use_pe=True, dwc_pe=True,
no_off=False, fixed_pe=False, ksize=3, log_cpb=False, kv_size=None
):
super().__init__()
n_head_channels = channel // n_heads
self.dwc_pe = dwc_pe
self.n_head_channels = n_head_channels
self.scale = self.n_head_channels ** -0.5
self.n_heads = n_heads
self.q_h, self.q_w = q_size
# self.kv_h, self.kv_w = kv_size
self.kv_h, self.kv_w = self.q_h // stride, self.q_w // stride
self.nc = n_head_channels * n_heads
self.n_groups = n_groups
self.n_group_channels = self.nc // self.n_groups
self.n_group_heads = self.n_heads // self.n_groups
self.use_pe = use_pe
self.fixed_pe = fixed_pe
self.no_off = no_off
self.offset_range_factor = offset_range_factor
self.ksize = ksize
self.log_cpb = log_cpb
self.stride = stride
kk = self.ksize
pad_size = kk // 2 if kk != stride else 0
self.conv_offset = nn.Sequential(
nn.Conv2d(self.n_group_channels, self.n_group_channels, kk, stride, pad_size, groups=self.n_group_channels),
LayerNormProxy(self.n_group_channels),
nn.GELU(),
nn.Conv2d(self.n_group_channels, 2, 1, 1, 0, bias=False)
)
if self.no_off:
for m in self.conv_offset.parameters():
m.requires_grad_(False)
self.proj_q = nn.Conv2d(
self.nc, self.nc,
kernel_size=1, stride=1, padding=0
)
self.proj_k = nn.Conv2d(
self.nc, self.nc,
kernel_size=1, stride=1, padding=0
)
self.proj_v = nn.Conv2d(
self.nc, self.nc,
kernel_size=1, stride=1, padding=0
)
self.proj_out = nn.Conv2d(
self.nc, self.nc,
kernel_size=1, stride=1, padding=0
)
self.proj_drop = nn.Dropout(proj_drop, inplace=True)
self.attn_drop = nn.Dropout(attn_drop, inplace=True)
if self.use_pe and not self.no_off:
if self.dwc_pe:
self.rpe_table = nn.Conv2d(
self.nc, self.nc, kernel_size=3, stride=1, padding=1, groups=self.nc)
elif self.fixed_pe:
self.rpe_table = nn.Parameter(
torch.zeros(self.n_heads, self.q_h * self.q_w, self.kv_h * self.kv_w)
)
trunc_normal_(self.rpe_table, std=0.01)
elif self.log_cpb:
# Borrowed from Swin-V2
self.rpe_table = nn.Sequential(
nn.Linear(2, 32, bias=True),
nn.ReLU(inplace=True),
nn.Linear(32, self.n_group_heads, bias=False)
)
else:
self.rpe_table = nn.Parameter(
torch.zeros(self.n_heads, self.q_h * 2 - 1, self.q_w * 2 - 1)
)
trunc_normal_(self.rpe_table, std=0.01)
else:
self.rpe_table = None
@torch.no_grad()
def _get_ref_points(self, H_key, W_key, B, dtype, device):
ref_y, ref_x = torch.meshgrid(
torch.linspace(0.5, H_key - 0.5, H_key, dtype=dtype, device=device),
torch.linspace(0.5, W_key - 0.5, W_key, dtype=dtype, device=device),
indexing='ij'
)
ref = torch.stack((ref_y, ref_x), -1)
ref[..., 1].div_(W_key - 1.0).mul_(2.0).sub_(1.0)
ref[..., 0].div_(H_key - 1.0).mul_(2.0).sub_(1.0)
ref = ref[None, ...].expand(B * self.n_groups, -1, -1, -1) # B * g H W 2
return ref
@torch.no_grad()
def _get_q_grid(self, H, W, B, dtype, device):
ref_y, ref_x = torch.meshgrid(
torch.arange(0, H, dtype=dtype, device=device),
torch.arange(0, W, dtype=dtype, device=device),
indexing='ij'
)
ref = torch.stack((ref_y, ref_x), -1)
ref[..., 1].div_(W - 1.0).mul_(2.0).sub_(1.0)
ref[..., 0].div_(H - 1.0).mul_(2.0).sub_(1.0)
ref = ref[None, ...].expand(B * self.n_groups, -1, -1, -1) # B * g H W 2
return ref
def forward(self, x):
B, C, H, W = x.size()
dtype, device = x.dtype, x.device
q = self.proj_q(x)
q_off = einops.rearrange(q, 'b (g c) h w -> (b g) c h w', g=self.n_groups, c=self.n_group_channels)
offset = self.conv_offset(q_off).contiguous() # B * g 2 Hg Wg
Hk, Wk = offset.size(2), offset.size(3)
n_sample = Hk * Wk
if self.offset_range_factor >= 0 and not self.no_off:
offset_range = torch.tensor([1.0 / (Hk - 1.0), 1.0 / (Wk - 1.0)], device=device).reshape(1, 2, 1, 1)
offset = offset.tanh().mul(offset_range).mul(self.offset_range_factor)
offset = einops.rearrange(offset, 'b p h w -> b h w p')
reference = self._get_ref_points(Hk, Wk, B, dtype, device)
if self.no_off:
offset = offset.fill_(0.0)
if self.offset_range_factor >= 0:
pos = offset + reference
else:
pos = (offset + reference).clamp(-1., +1.)
if self.no_off:
x_sampled = F.avg_pool2d(x, kernel_size=self.stride, stride=self.stride)
assert x_sampled.size(2) == Hk and x_sampled.size(3) == Wk, f"Size is {x_sampled.size()}"
else:
pos = pos.type(x.dtype)
x_sampled = F.grid_sample(
input=x.reshape(B * self.n_groups, self.n_group_channels, H, W),
grid=pos[..., (1, 0)], # y, x -> x, y
mode='bilinear', align_corners=True) # B * g, Cg, Hg, Wg
x_sampled = x_sampled.reshape(B, C, 1, n_sample)
q = q.reshape(B * self.n_heads, self.n_head_channels, H * W)
k = self.proj_k(x_sampled).reshape(B * self.n_heads, self.n_head_channels, n_sample)
v = self.proj_v(x_sampled).reshape(B * self.n_heads, self.n_head_channels, n_sample)
attn = torch.einsum('b c m, b c n -> b m n', q, k) # B * h, HW, Ns
attn = attn.mul(self.scale)
if self.use_pe and (not self.no_off):
if self.dwc_pe:
residual_lepe = self.rpe_table(q.reshape(B, C, H, W)).reshape(B * self.n_heads, self.n_head_channels, H * W)
elif self.fixed_pe:
rpe_table = self.rpe_table
attn_bias = rpe_table[None, ...].expand(B, -1, -1, -1)
attn = attn + attn_bias.reshape(B * self.n_heads, H * W, n_sample)
elif self.log_cpb:
q_grid = self._get_q_grid(H, W, B, dtype, device)
displacement = (q_grid.reshape(B * self.n_groups, H * W, 2).unsqueeze(2) - pos.reshape(B * self.n_groups, n_sample, 2).unsqueeze(1)).mul(4.0) # d_y, d_x [-8, +8]
displacement = torch.sign(displacement) * torch.log2(torch.abs(displacement) + 1.0) / np.log2(8.0)
attn_bias = self.rpe_table(displacement) # B * g, H * W, n_sample, h_g
attn = attn + einops.rearrange(attn_bias, 'b m n h -> (b h) m n', h=self.n_group_heads)
else:
rpe_table = self.rpe_table
rpe_bias = rpe_table[None, ...].expand(B, -1, -1, -1)
q_grid = self._get_q_grid(H, W, B, dtype, device)
displacement = (q_grid.reshape(B * self.n_groups, H * W, 2).unsqueeze(2) - pos.reshape(B * self.n_groups, n_sample, 2).unsqueeze(1)).mul(0.5)
attn_bias = F.grid_sample(
input=einops.rearrange(rpe_bias, 'b (g c) h w -> (b g) c h w', c=self.n_group_heads, g=self.n_groups),
grid=displacement[..., (1, 0)],
mode='bilinear', align_corners=True) # B * g, h_g, HW, Ns
attn_bias = attn_bias.reshape(B * self.n_heads, H * W, n_sample)
attn = attn + attn_bias
attn = F.softmax(attn, dim=2)
attn = self.attn_drop(attn)
out = torch.einsum('b m n, b c n -> b c m', attn, v)
if self.use_pe and self.dwc_pe:
out = out + residual_lepe
out = out.reshape(B, C, H, W)
y = self.proj_drop(self.proj_out(out))
return y
class Bottleneck_DAttention(Bottleneck):
"""Standard bottleneck with DAttention."""
def __init__(self, c1, c2, fmapsize, shortcut=True, g=1, k=(3, 3), e=0.5): # ch_in, ch_out, shortcut, groups, kernels, expand
super().__init__(c1, c2, shortcut, g, k, e)
c_ = int(c2 * e) # hidden channels
self.attention = DAttention(c2, fmapsize)
def forward(self, x):
return x + self.attention(self.cv2(self.cv1(x))) if self.add else self.attention(self.cv2(self.cv1(x)))
class C3_DAttention(C3):
def __init__(self, c1, c2, n=1, fmapsize=None, shortcut=False, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e) # hidden channels
self.m = nn.Sequential(*(Bottleneck_DAttention(c_, c_, fmapsize, shortcut, g, k=(1, 3), e=1.0) for _ in range(n)))Deformable Attention在处理图像时,主要通过引入可变形的采样机制来增强传统注意力机制的性能,具体原理如下:
自适应注意力:
与传统的自注意力机制不同,Deformable Attention不是对所有像素(或特征点)进行均匀的全局关注,而是根据图像的具体内容,动态选择更为重要的特征点。通过学习可变形的偏移量,模型可以在特征图上找到最相关的部分并集中注意力,从而更加有效地处理图像信息。
可变形采样:
处理图像时,Deformable Attention会对每个查询点(即需要获取上下文信息的特征点)计算一个偏移量,然后在特征图上进行偏移后的采样。这种采样方式借鉴了可变形卷积网络的思想,使得模型能够灵活地调整关注的位置,以适应不同的图像结构和内容。
高效计算:
通过集中注意力于更少、更相关的图像区域,Deformable Attention大大降低了计算复杂度。传统的全局自注意力机制需要计算所有位置之间的相似度,计算量随输入图像的大小呈平方增长,而Deformable Attention只对少数关键位置进行采样,因此更加高效。
位置灵活性:
Deformable Attention能够适应不同尺度和不同形状的图像区域,因为它可以通过学习的偏移量灵活地调整关注的区域,而不再局限于固定的网格或特定的分割方式。这使得模型在处理多样化的图像场景时表现更为出色,特别是在需要聚焦于特定目标或区域时。
特征重构:
通过在特征图上的可变形采样,Deformable Attention能够重构输入图像的特征表示。这种重构不是简单的线性变换,而是通过关注图像中更具代表性和重要性的区域,从而生成更有用的特征表示,提升了后续任务(如分类、检测)的效果。
总之,Deformable Attention在处理图像时,通过灵活、动态的注意力机制,更有效地聚焦图像中重要区域,降低计算复杂度的同时,提高了模型对图像细节的捕捉能力和整体表现。

2.2 新增yaml文件
关键步骤二:在下/yolov5/models下新建文件 yolov5_C3_DAttention.yaml并将下面代码复制进去
- 目标检测yaml文件
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
anchors:
- [10, 13, 16, 30, 33, 23] # P3/8
- [30, 61, 62, 45, 59, 119] # P4/16
- [116, 90, 156, 198, 373, 326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3_DAttention, [1024, [20, 20]]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head: [
[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, "nearest"]],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, "nearest"]],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
- 语义分割yaml文件
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
anchors:
- [10, 13, 16, 30, 33, 23] # P3/8
- [30, 61, 62, 45, 59, 119] # P4/16
- [116, 90, 156, 198, 373, 326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3_DAttention, [1024, [20, 20]]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head: [
[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, "nearest"]],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, "nearest"]],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Segment, [nc, anchors, 32, 256]], # Detect(P3, P4, P5)
]
温馨提示:本文只是对yolov5基础上添加模块,如果要对yolov5n/l/m/x进行添加则只需要指定对应的depth_multiple 和 width_multiple。
# YOLOv5n
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
# YOLOv5s
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# YOLOv5l
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# YOLOv5m
depth_multiple: 0.67 # model depth multiple
width_multiple: 0.75 # layer channel multiple
# YOLOv5x
depth_multiple: 1.33 # model depth multiple
width_multiple: 1.25 # layer channel multiple2.3 注册模块
关键步骤三:在yolo.py的parse_model函数替换添加C3_DAttention

2.4 执行程序
在train.py中,将cfg的参数路径设置为yolov5_C3_DAttention.yaml的路径
建议大家写绝对路径,确保一定能找到

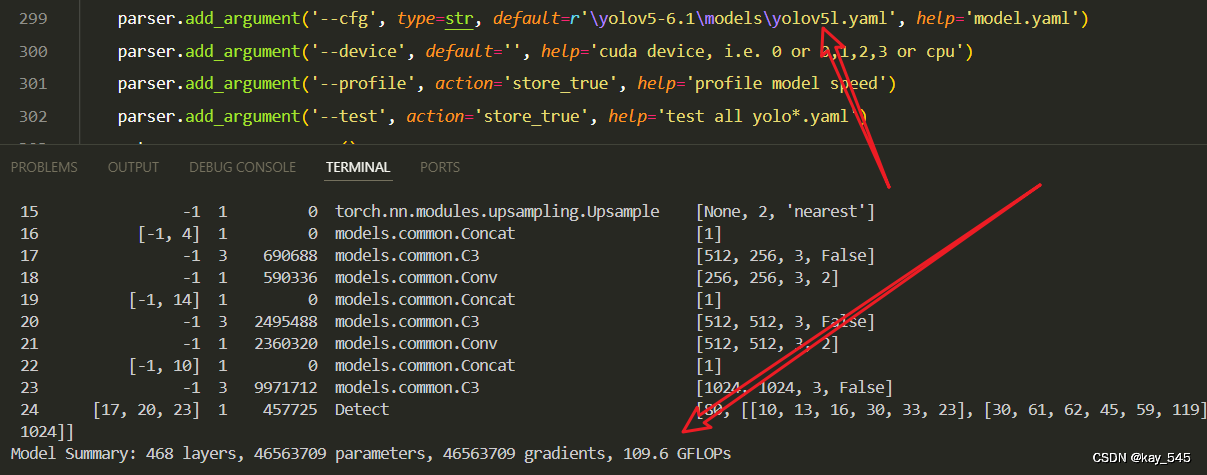
🚀运行程序,如果出现下面的内容则说明添加成功🚀
from n params module arguments
0 -1 1 7040 models.common.Conv [3, 64, 6, 2, 2]
1 -1 1 73984 models.common.Conv [64, 128, 3, 2]
2 -1 3 156928 models.common.C3 [128, 128, 3]
3 -1 1 295424 models.common.Conv [128, 256, 3, 2]
4 -1 6 1118208 models.common.C3 [256, 256, 6]
5 -1 1 1180672 models.common.Conv [256, 512, 3, 2]
6 -1 9 6433792 models.common.C3 [512, 512, 9]
7 -1 1 4720640 models.common.Conv [512, 1024, 3, 2]
8 -1 3 13144320 models.common.C3_DAttention [1024, 1024, 3, [20, 20]]
9 -1 1 2624512 models.common.SPPF [1024, 1024, 5]
10 -1 1 525312 models.common.Conv [1024, 512, 1, 1]
11 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
12 [-1, 6] 1 0 models.common.Concat [1]
13 -1 3 2757632 models.common.C3 [1024, 512, 3, False]
14 -1 1 131584 models.common.Conv [512, 256, 1, 1]
15 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
16 [-1, 4] 1 0 models.common.Concat [1]
17 -1 3 690688 models.common.C3 [512, 256, 3, False]
18 -1 1 590336 models.common.Conv [256, 256, 3, 2]
19 [-1, 14] 1 0 models.common.Concat [1]
20 -1 3 2495488 models.common.C3 [512, 512, 3, False]
21 -1 1 2360320 models.common.Conv [512, 512, 3, 2]
22 [-1, 10] 1 0 models.common.Concat [1]
23 -1 3 9971712 models.common.C3 [1024, 1024, 3, False]
24 [17, 20, 23] 1 457725 Detect [80, [[10, 13, 16, 30, 33, 23], [30, 61, 62, 45, 59, 119], [116, 90, 156, 198, 373, 326]], [256, 512, 1024]]
YOLOv5_C3_DAttention summary: 410 layers, 49736317 parameters, 49736317 gradients3. 完整代码分享
https://pan.baidu.com/s/10FfD6tO-kohOHOc3v66tow?pwd=e5ee提取码: e5ee
4. GFLOPs
关于GFLOPs的计算方式可以查看:百面算法工程师 | 卷积基础知识——Convolution
未改进的GFLOPs
改进后的GFLOPs
现在手上没有卡了,等过段时候有卡了把这补上,需要的同学自己测一下
5. 进阶
可以结合损失函数或者卷积模块进行多重改进
YOLOv5改进 | 损失函数 | EIoU、SIoU、WIoU、DIoU、FocuSIoU等多种损失函数——点击即可跳转
6. 总结
Deformable Attention通过引入可变形采样的机制,增强了传统自注意力机制的灵活性和效率。具体来说,它通过学习偏移量,动态调整查询所关注的键和值的位置,使得注意力模式能够根据输入数据的特定内容自适应地集中在更相关的区域。这种数据依赖的注意力方式相比传统的全局或局部注意力,不仅减少了计算开销,还能够更有效地捕捉到图像中的重要特征。同时,Deformable Attention在实现过程中使用双线性插值对偏移位置的特征进行采样,保持了模型的可微性,确保其能够无缝集成到训练过程中。总体而言,Deformable Attention在视觉任务中表现出色,特别是在需要模型专注于图像中特定区域的情况下,通过有效减少不必要的计算,实现了更好的性能表现。