前言
- 本系列教程旨在使用
UE5配置一个具备激光雷达+深度摄像机的仿真小车,并使用通过跨平台的方式进行ROS2和UE5仿真的通讯,达到小车自主导航的目的。 - 本教程默认有ROS2导航及其gazebo仿真相关方面基础,Nav2相关的学习教程可以参考本人的其他博客Nav2代价地图实现和原理–Nav2源码解读之CostMap2D(上)-CSDN博客
- 往期教程:
- 第一期:基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(一)—UnrealCV获取深度+分割图像-CSDN博客
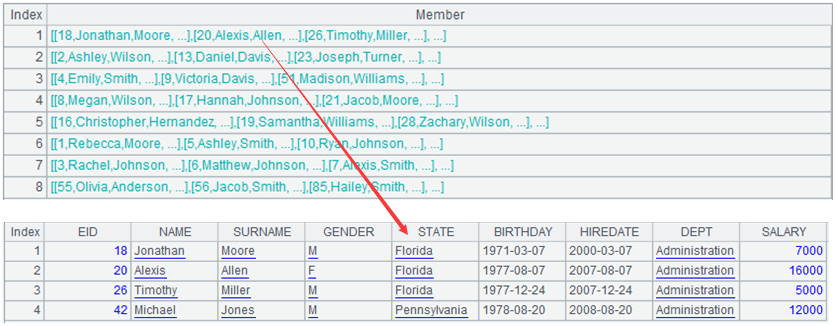
- 第二期:基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(二)—ROS2与UE5进行图像数据传输-CSDN博客
- UE5系列教程:
- 第一期:UE5-C++入门教程(一):使用代码创建一个指定目标的移动小球-CSDN博客
- 第二期:UE5-C++入门教程(二)—编写Editor类别的自定义模型实现小球规划路线的可视化-CSDN博客
- 本教程环境支持:
- UE5.43
- ubuntu 22.04 ros2 humble
- 前两期我们讲了如何使用
UnrealCV在UE5中捕获深度,分割,原始图像,并借助rosbridge将图像数据实时传输到ubuntu22.04 ros2 humble中。本期我们来讲讲如何在UE5中模拟激光雷达的仿真数据。
激光雷达
介绍
-
激光雷达(Lidar)是一种利用激光来探测和测量物体距离、速度、方位和形状的技术。它通过发射激光脉冲,并接收从目标反射回来的激光,从而计算出目标的位置和特性。激光雷达广泛应用于各种领域,如地理信息系统(GIS)、环境监测、遥感、自动驾驶汽车、考古学等。
-
激光雷达的基本工作原理如下:
- 发射激光:激光雷达系统发射激光脉冲,这些脉冲可以是连续波或者脉冲波。
- 反射激光:激光脉冲照射到目标物体后,部分光波会被反射回来。
- 接收反射光:激光雷达系统中的接收器会捕捉到反射回来的激光。
- 数据处理:系统通过计算激光发射和接收之间的时间差,以及激光的波长,来确定目标的距离。通过分析反射光的强度、频率变化等,还可以获取目标的速度、方位和形状等信息。
性能指标
-
这里我们借助
镭神智能公司旗下的16线机械式激光雷达来讲解激光雷达具备的基本参数(这里不是广告(迫真))
-
- 激光波长905nm:
- 激光波长是激光雷达发射的激光的波长,通常以纳米(nm)为单位。常用的波长包括905nm和1550nm。不同波长的激光具有不同的特性和应用,例如,905nm波长的激光雷达通常成本较低,但容易受到阳光和其他环境因素的干扰;而1550nm波长的激光雷达具有更好的抗干扰能力和较长的探测距离。
- 探测距离70/120/150/200m:
- 探测距离是指激光雷达能够有效测量目标的最远距离。探测距离受激光功率、目标反射率、大气条件等因素的影响。通常,激光雷达的探测距离从几米到几百米不等。
- 视场角(FOV)- 水平视场角:360°,垂直视场角:-15°~15° / -10°~10°:
- 视场角是指激光雷达能够覆盖的水平或垂直角度范围。水平视场角通常为360度,而垂直视场角则取决于激光雷达的具体设计。视场角越大,激光雷达能够感知的环境范围就越广。
- 测距精度±3cm:
- 测距精度是指激光雷达测量距离的准确程度,通常以厘米或毫米为单位。高精度的激光雷达可以提供非常准确的距离测量,这对于需要高精度定位和测量的应用至关重要。
- 角分辨率垂直:2°,水平:0.09°@5Hz, 0.18°@10Hz, 0.36°@20Hz:
- 角分辨率是指激光雷达能够分辨的最小角度变化。高角分辨率意味着激光雷达可以更细致地描绘目标的形状和轮廓。角分辨率通常分为水平角分辨率和垂直角分辨率。
- 出点数- 320,000点/秒(单回波):
- 出点数是指激光雷达每秒钟能够发射的激光点数。出点数越多,激光雷达获取的环境信息越丰富,扫描速度越快。
- 线束16线:
- 线束是指激光雷达在垂直方向上的激光束数量。多线激光雷达通过多个激光发射器在垂直方向上的分布,形成多条线束的扫描。线束越多,对环境的描述越充分。
- 安全等级 1级(人眼安全):
- 激光雷达的安全等级需要满足特定的安全标准,例如Class 1,以确保在正常使用条件下不会对用户造成伤害。
- 输出参数:
- 输出参数包括障碍物的位置、速度、方向、时间戳、反射率等,这些参数对于后续的数据处理和分析至关重要。
- IP防护等级IP67:
- IP防护等级表示激光雷达对固体颗粒和水的防护能力,对于在恶劣环境下工作的激光雷达尤为重要。
- 功率和供电电压:
- 功率和供电电压决定了激光雷达的能耗和适用场景。激光雷达的功率通常以瓦特(W)为单位,供电电压则取决于激光雷达的具体设计。
- 激光发射方式- 机械旋转:
- 激光发射方式分为机械旋转和固态两种。机械旋转激光雷达通过旋转发射器来扫描环境,而固态激光雷达则通过电子方式控制激光束的方向。
- 使用寿命:
- 使用寿命是指激光雷达在正常工作条件下的预期寿命。机械旋转激光雷达的使用寿命一般在几千小时,而固态激光雷达的使用寿命可高达10万小时。
题外话-旧版本UE5插件支持(不使用)
- 值得一提的是,在UE5的虚幻商城中,是存在一款免费的2D雷达仿真插件的,但是由于其支持的引擎版本,本期我们不使用该插件。

1.创建自定义雷达插件
- 本小结我们将借助激光雷达的原理,不借助任何现成插件,尝试在
UE5中借助内置函数,通过cpp代码实现完成上述激光雷达的仿真。
1-1 概念解析–插件
- Unreal Engine 5 (UE5) 提供了一个强大的插件系统,允许开发者扩展和定制引擎的功能。插件可以是社区创建的,也可以是 Epic Games 官方提供的,它们可以添加新的工具、功能、内容或集成到 Unreal Engine 中。
- UE5 插件的特点和优势包括:
- 模块化:插件通常以模块的形式集成到 Unreal Engine 中,这意味着它们可以独立于引擎的其他部分进行开发、编译和更新。
- 可定制性:开发者可以根据自己的需求定制插件,添加新的功能或改进现有功能。
- 可重用性:插件可以在不同的项目中重用,节省开发时间和资源。
- 易于安装:Unreal Engine 提供了一个插件市场,开发者可以轻松地浏览、安装和管理插件。
- 要使用 UE5 插件,我们只需要将其导入到 Unreal Engine 项目中。一旦插件被导入,开发者可以在项目的插件管理器中启用或禁用插件,并根据需要配置插件的设置。

1-2 创建自定义插件
-
新建一个新的项目(这里取名为
Plugins_project),选择C++而不是蓝图,否则我们将会只有一种类型的插件 -
打开你的新建的项目(记得确保是
C++),在左上角菜单栏点击编辑,在下拉菜单栏中找到插件,在新打开的插件窗口中选择+ 添加,会出现如下画面
-
这里我们把插件名字定义为
LaserScannerSim
- 作者:我www
- 描述为:a plugin which mantian at 2D laser scanning simualtion including laser displaying and laser messages publishing
-
VS2022打开项目(记得重新加载),在项目根目录下会多出一个Plugins文件夹
-
.uplugin文件是 Unreal Engine 中的插件描述文件,它定义了插件的各种元数据和设置,包括插件的名称、版本、描述、作者、加载阶段、模块列表等。这个文件是插件的重要组成部分,它告诉 Unreal Engine 如何加载、集成和管理插件。我们来关注LaserScannerSim.uplugin这个文件的结尾部分
"Modules": [
{
"Name": "LaserScannerSim",
"Type": "Runtime",
"LoadingPhase": "Default"
}
]
Name:LaserScannerSim这是模块的名称,它应该是独一无二的,并且会用作模块的标识符。在代码中,通常会与模块相关的文件和目录同名。
Type:"Runtime"这表示模块类型为运行时模块。运行时模块包含在游戏或应用程序的运行时阶段加载的代码和资源。LoadingPhase:"Default"- 这指定了模块的加载阶段。Default加载阶段意味着模块将在默认的加载时间点被加载,这对于大多数插件来说是合适的。如果需要更细粒度的控制,可以指定其他加载阶段,例如PostEngineInit、PreLoadMap或PostLoadMap。- 这里我们把这个插件的
LoadingPhase改为PostEngineInit,我希望模块在引擎初始化完成后加载。
"Modules": [
{
"Name": "LaserScannerSim",
"Type": "Runtime",
"LoadingPhase": "PostEngineInit"
}
]
- 紧接着我们来看看该插件文件夹下的两个文件夹
- Public:LaserScannerSim.hpp
// Copyright Epic Games, Inc. All Rights Reserved.
#pragma once
#include "CoreMinimal.h"
#include "Modules/ModuleManager.h"
class FLaserScannerSimModule : public IModuleInterface
{
public:
/** IModuleInterface implementation */
virtual void StartupModule() override;
virtual void ShutdownModule() override;
};
- Private:LaserScannerSim.cpp
// Copyright Epic Games, Inc. All Rights Reserved.
#include "LaserScannerSim.h"
#define LOCTEXT_NAMESPACE "FLaserScannerSimModule"
void FLaserScannerSimModule::StartupModule()
{
// This code will execute after your module is loaded into memory; the exact timing is specified in the .uplugin file per-module
}
void FLaserScannerSimModule::ShutdownModule()
{
// This function may be called during shutdown to clean up your module. For modules that support dynamic reloading,
// we call this function before unloading the module.
}
#undef LOCTEXT_NAMESPACE
IMPLEMENT_MODULE(FLaserScannerSimModule, LaserScannerSim)
StartupModule和ShutdownModule。这两个函数分别在模块加载到内存后和卸载前调用。稍后我们将讲述如何运用IModuleInterface类它定义了模块(Module)在Unreal Engine中加载和卸载时的行为。
1-3 报错提示-UE5.4版本BUG
-
值得注意的是,在UE5.4中,在上述创建自定义插件后在VS2022进行编译会出现下述报错

-
这是因为你不能在UE的
Live Coding enabled的时候进行编译,这时我们选择关闭UE的Live Coding enabled
-
重新编译,成功。
2 创建自定义Componet雷达组件
- 我们来快速思考以下,我们要创建的雷达插件应该是可以广泛运用到用户的各类模型(Actor)上,用户可以根据调用我们的雷达组件,根据其喜好参数,把此组件运用到任意模组中,可以是车辆,或者是雷达模型上。因此我们要创建一个
Componet组件,它可以被套用到用户希望的Actor上
2-1 创建自定义雷达组件Components
-
创建组件的详细教程见->UE5-C++入门教程(一):使用代码创建一个指定目标的移动小球-CSDN博客
-
这里我们快速创建一个组件,选择
ActorComponent作为父类
-
为新的组件取名为
LaserScanner2D,注意添加到我们的插件模块下(并设置为私有)
2-2 激光雷达实现函数
-
这里介绍一个
UE5提供的内置函数LineTraceSingleByChannel,我们打开官方API手册,搜索得到相关关于这个函数的API实现
-
函数
LineTraceSingleByChannel用于执行光线投射(Line Tracing)。这个函数可以用来检测从起点到终点之间是否有碰撞,并返回碰撞信息。FHitResult & OutHit用于存储光线投射的结果。如果检测到碰撞,这个参数会被填充碰撞信息,例如碰撞的位置、碰撞的物体等。const FVector & Start这是光线投射的起点,类型为FVector,表示三维空间中的一个点。const FVector & End: 这是光线投射的终点,类型同样为FVector。ECollisionChannel TraceChannel这是一个枚举类型,用于指定需要检测的碰撞通道。const FCollisionQueryParams & Params:这是一个引用参数,用于配置光线投射的查询参数,允许你设置诸如忽略特定的Actor、检测隐藏的Actor等选项。const FCollisionResponseParams & ResponseParam:允许你设置碰撞后的响应行为
bool LineTraceSingleByChannel
&40;
struct FHitResult & OutHit,
const FVector & Start,
const FVector & End,
ECollisionChannel TraceChannel,
const FCollisionQueryParams & Params,
const FCollisionResponseParams & ResponseParam
&41; const
2-3 激光雷达可视化
-
这里我们使用
DrawDebugLine对雷达的射线进行可视化
-
WorldContextObject: 表示当前世界上下文的对象。通常,你会传递GetWorld()的返回值给这个参数,它会返回一个指向当前游戏世界的指针。
LineStart: 直线的起始位置,它是一个FVector类型,表示三维空间中的一个点。LineEnd: 直线的结束位置,它也是一个FVector类型,表示三维空间中的另一个点。LineColor: 直线的颜色,它是一个FLinearColor类型,允许你设置红、绿、蓝和透明度。Duration: 直线在游戏世界中显示的时间(以秒为单位)。如果设置为-1.0f,直线会一直显示直到下一帧或显式地被清除。Thickness: 直线的厚度(以世界单位为单位)。这允许你设置直线的宽度。
static void DrawDebugLine
&40;
const UObject &42; WorldContextObject,
const FVector LineStart,
const FVector LineEnd,
FLinearColor LineColor,
float Duration,
float Thickness
&41;
2-4 编写雷达组件基本逻辑
- 那么我们来编写一下雷达组件的实现逻辑
- LaserScanner2D.hpp,我们为雷达组件添加以下逻辑的代码
FVector StartRelativeLocation;//起始位置bool bScanEnabled = true;//是否使能int32 Resolution = 1;// 分辨率,每1度检测一次float ScanHz = 30.0f;// 扫描频率,每秒30次float LaserMinDistance = 0.1f;// 最近检测距离float LaserMaxDistance = 100.0f;// 最远检测距离float debugLineStayDuration = 1.0f;// 射线持续时间
// Fill out your copyright notice in the Description page of Project Settings.
#pragma once
#include "CoreMinimal.h"
#include "Components/ActorComponent.h"
#include "LaserScanner2D.generated.h"
UCLASS( ClassGroup=(Custom), meta=(BlueprintSpawnableComponent) )
class ULaserScanner2D : public UActorComponent
{
GENERATED_BODY()
public:
// Sets default values for this component's properties
ULaserScanner2D();
protected:
// Called when the game starts
virtual void BeginPlay() override;
public:
void ScanForObjects();
public:
// Called every frame
virtual void TickComponent(float DeltaTime, ELevelTick TickType, FActorComponentTickFunction* ThisTickFunction) override;
private:
UPROPERTY(EditAnywhere)
FVector StartRelativeLocation; //起始位置
UPROPERTY(EditAnywhere)
bool bScanEnabled = true; //是否使能
UPROPERTY(EditAnywhere)
int32 Resolution = 1; // 分辨率,每10度检测一次
UPROPERTY(EditAnywhere)
float ScanHz = 30.0f; // 扫描频率,每秒30次
UPROPERTY(EditAnywhere)
float LaserMinDistance = 0.1f; // 最近检测距离
UPROPERTY(EditAnywhere)
float LaserMaxDistance = 100.0f; // 最远检测距离
UPROPERTY(EditAnywhere)
float debugLineStayDuration = 1.0f; // 射线持续时间
};
- LaserScanner2D.cpp
- 我们在
BeginPlay()初始化一个起始位置
#include "LaserScanner2D.h"
ULaserScanner2D::ULaserScanner2D()
{
PrimaryComponentTick.bCanEverTick = true;
}
void ULaserScanner2D::BeginPlay()
{
Super::BeginPlay();
StartRelativeLocation = FVector(0.0f, 0.0f, 0.0f);
}
TickComponent将会一直运行,我们让其根据我们指定的频率去调用我们写的雷达扫描函数
void ULaserScanner2D::TickComponent(float DeltaTime, ELevelTick TickType, FActorComponentTickFunction* ThisTickFunction)
{
Super::TickComponent(DeltaTime, TickType, ThisTickFunction);
static float AccumulatedTime = 0.0f; // 累积时间
AccumulatedTime += DeltaTime; // 累加Delta Time
// 当累积时间达到扫描周期时,执行扫描
if (AccumulatedTime >= 1.0f / ScanHz)
{
ScanForObjects();
AccumulatedTime -= 1.0f / ScanHz;
}
}
- 雷达扫描函数
for (int32 i = 0; i < 360; i += Resolution)我们按照指定分辨率去选择扫描Rotation: 这个FRotator对象表示当前射线发射的方向。它是一个绕Y轴旋转的旋转器,其Z轴和X轴的值为0,Y轴的值为当前的角度i。
EndLocation: 这是当前射线的结束位置。它通过将StartLocation与Rotation的向量相加以LaserMaxDistance的长度来计算得出。FMath::Clamp函数确保这个距离不会超过LaserMaxDistance的最远距离,也不会小于LaserMinDistance的最近距离。OutHit: 这是一个FHitResult对象,它用于存储射线与场景中其他对象碰撞的信息。Params: 这是一个FCollisionQueryParams对象,它定义了射线检测的参数。AddIgnoredActor(GetOwner())调用确保激光雷达不会与自己所在的Actor发生碰撞。- 如果检测到膨胀,则绘制一条从
StartLocation到OutHit.Location的绿色直线。OutHit.Location是射线碰撞点的位置。如果没有检测到碰撞,则绘制一条从StartLocation到EndLocation的红色直线。
GetWorld():- 在Unreal Engine中,
GetWorld()是一个成员函数,用于获取当前Actor或Component所在的World对象。World对象是Unreal Engine中的一个核心概念,它代表了游戏世界的环境,包括场景中的所有Actor、地形、光照、音效等。
- 在Unreal Engine中,
UWorld* GetWorld() const;
GetWorld()成员函数是许多类的接口的一部分,尤其是那些与游戏世界直接交互的类。以下是一些常见的具有GetWorld()函数的类:AActor: 代表游戏世界中的可移动对象。UActorComponent: 代表附加到Actor上的组件,它们通常需要访问游戏世界来进行各种操作。UGameInstance: 代表游戏会话的单例,它可以访问当前的游戏世界。ULevel: 代表游戏世界中的一个关卡。APlayerController: 代表玩家控制器,它可以访问游戏世界来控制玩家视角和输入。AGameModeBase: 代表游戏模式,它定义了游戏的基本规则和流程。UUserWidget: 代表游戏中的用户界面元素,它可能需要访问游戏世界来获取数据或执行操作。UFieldSystem: 代表场系统,用于在游戏世界中模拟物理场。
- 然而,并不是所有的类都有GetWorld()函数。
void ULaserScanner2D::ScanForObjects()
{
const FVector StartLocation = StartRelativeLocation;
for (int32 i = 0; i < 360; i += Resolution)
{
FRotator Rotation = FRotator(0.0f, i, 0.0f);
FVector EndLocation = StartLocation + Rotation.Vector() * FMath::Clamp(LaserMaxDistance, LaserMinDistance, LaserMaxDistance);
FHitResult OutHit;
FCollisionQueryParams Params;
Params.AddIgnoredActor(GetOwner());
if (GetWorld()->LineTraceSingleByChannel(OutHit, StartLocation, EndLocation, ECC_Visibility, Params))
{
DrawDebugLine(GetWorld(), StartLocation, OutHit.Location, FColor::Green, false, debugLineStayDuration);
}
else
{
DrawDebugLine(GetWorld(), StartLocation, EndLocation, FColor::Red, false, debugLineStayDuration);
}
}
}
2-5 编译与验证
-
点击VS2022的绿色透明小箭头,编译代码
-
在内容处创建一个蓝图类
Lidar(UE教程我们详细见过了,这里快速通过)
-
为蓝图类添加LaserScanner2D组件

-
我们把新的
Lidar蓝图类添加到常见中,并为主场景添加一些基本的物体
-
我们可以在雷达类下修改一些基本的参数

-
运行,可以看到我们的雷达成功完成目标

小结
- 本期我们通过自定义插件的方式实现了激光雷达的仿真
- 下一期我们将讲述如何对雷达数据进行打包并转发给
ubuntu的ROS2 - 感谢大家对本教程的支持!如有错误,欢迎指出!
















![[星瞳科技]OpenMV是否属于单片机?](https://img-blog.csdnimg.cn/img_convert/960856f3b2d564ef0608e5e12317b303.png)
