transformer死亡20问
- 1. Transformer为何使用多头注意力机制?
- 2. Transformer为什么Q和K使用不同的权重矩阵生成,为何不能使用同一个值进行自身的点乘
- 3. Transformer计算attention的时候为何选择点乘而不是加法?两者计算复杂度和效果上有什么区别
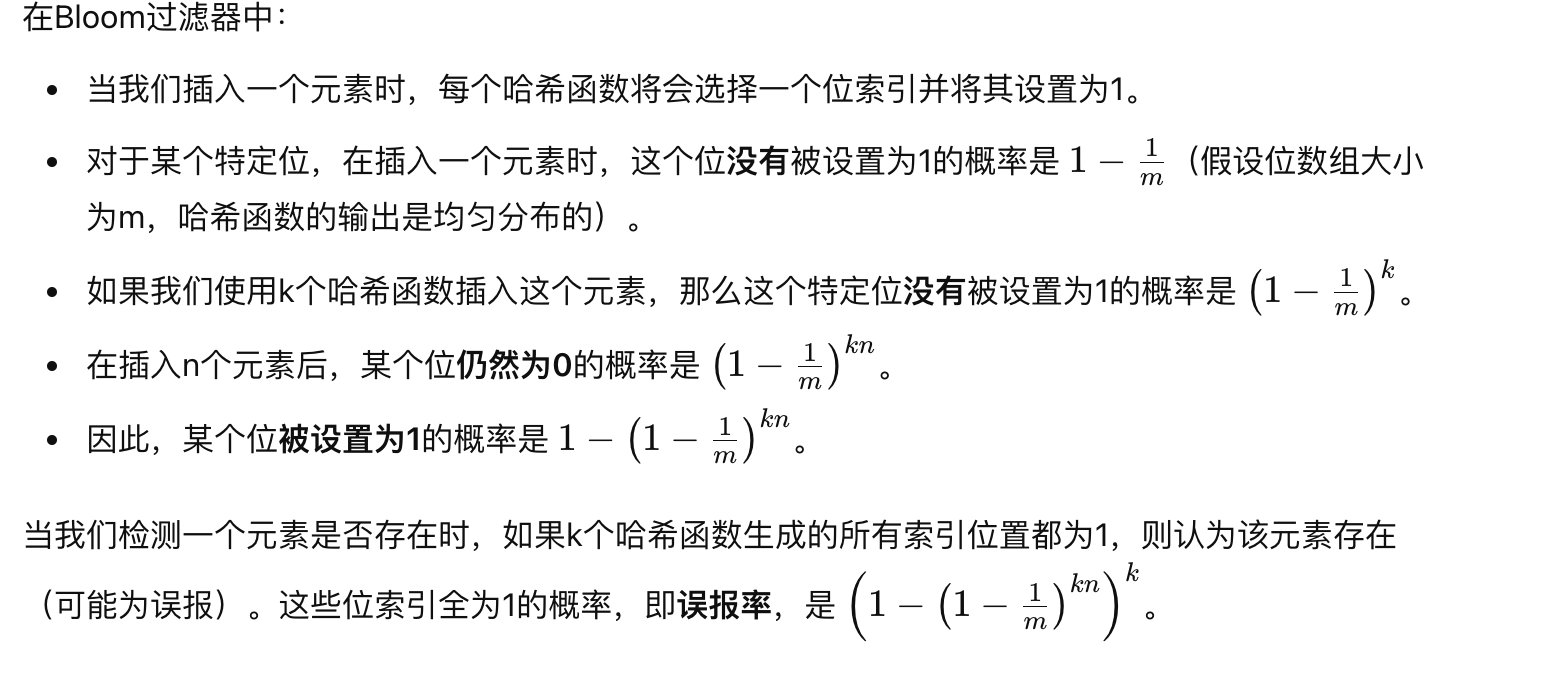
- 4. 为什么在进行softmax之前需要对attention进行scaled(为什么除以dk的平方根),并使用公式推导进行讲解
- 5.在计算attention score的时候如何对padding做mask操作
- 6. Transformer中的残差结构以及意义。
- 7. 为什么transformer块使用LayerNorm而不是BatchNorm?LayerNorm 在Transformer的位置是哪里?
- 7.1为什么使用LayerNorm而不是BatchNorm?
- 7.2LayerNorm在Transformer中的位置
- 8. 简单描述一下Transformer中的前馈神经网络?使用了什么激活函数?相关优缺点?
- 9.Decoder阶段的多头自注意力和encoder的多头自注意力有什么区别?(为什么需要decoder自注意力需要进行 sequence mask)
- 9.1 Encoder阶段的多头自注意力机制
- 9.2 Decoder阶段的多头自注意力机制
- 9.3 为什么Decoder的自注意力需要进行序列掩码(sequence mask)
1. Transformer为何使用多头注意力机制?
Transformer模型使用多头注意力机制(Multi-Head Attention)而不是单头注意力(Single-Head Attention),主要有以下几个原因:
-
捕捉不同的特征:多头注意力机制可以通过不同的注意力头来学习输入序列的不同子空间中的不同特征。每个头都有自己的一组权重,这使得模型能够从不同的角度看待数据,从而捕捉到更多的信息和模式。
-
更好的表示能力:通过并行计算多个注意力头,可以增强模型的表示能力。每个头可以关注不同的位置和上下文,综合起来的表示更丰富、更全面。
-
降低计算复杂度:虽然多个头意味着更多的计算,但每个头的计算可以在较低维度的-子空间中进行。将输入分成多个子空间来计算注意力,然后再拼接起来,这样的方式在并行计算硬件上效率更高。
-
缓解过拟合:单个注意力头可能会过度集中在某些特定的特征或模式上,而忽略其他重要的信息。多头注意力机制通过同时考虑多个头的输出,能够更好地泛化到不同的输入,从而缓解过拟合的问题。
-
提升模型的稳定性:多头注意力机制有助于减小模型对某一个特定头的依赖,提高模型的鲁棒性和稳定性。
具体来说,在Transformer模型中,多头注意力机制的工作流程如下:
- 线性变换:对于每个注意力头,将输入通过线性变换得到查询(Query)、键(Key)和值(Value)的向量。
- 计算注意力权重:对于每个头,计算查询和键之间的点积,并通过softmax函数归一化得到注意力权重。
- 加权求和:使用注意力权重对值进行加权求和,得到每个头的输出。
- 拼接输出:将所有头的输出拼接起来,并通过线性变换得到最终的多头注意力输出。
这样,通过多头注意力机制,Transformer模型能够更好地处理序列数据中的复杂模式和关系,从而在自然语言处理等任务中取得优异的表现。
- 多头注意力机制的代码例子
import torch
import torch.nn as nn
import torch.nn.functional as F
class MultiHeadAttention(nn.Module):
def __init__(self, embed_size, heads):
super(MultiHeadAttention, self).__init__()
self.embed_size = embed_size
self.heads = heads
self.head_dim = embed_size // heads
assert (
self.head_dim * heads == embed_size
), "Embedding size needs to be divisible by heads"
self.values = nn.Linear(self.head_dim, embed_size, bias=False)
self.keys = nn.Linear(self.head_dim, embed_size, bias=False)
self.queries = nn.Linear(self.head_dim, embed_size, bias=False)
self.fc_out = nn.Linear(embed_size, embed_size)
def forward(self, values, keys, query, mask):
N = query.shape[0]
value_len, key_len, query_len = values.shape[1], keys.shape[1], query.shape[1]
# Split the embedding into self.heads different pieces
values = values.reshape(N, value_len, self.heads, self.head_dim)
keys = keys.reshape(N, key_len, self.heads, self.head_dim)
queries = query.reshape(N, query_len, self.heads, self.head_dim)
values = self.values(values)
keys = self.keys(keys)
queries = self.queries(queries)
# Reshape for batch matrix multiplication
queries = queries.permute(0, 2, 1, 3).reshape(N * self.heads, query_len, self.head_dim)
keys = keys.permute(0, 2, 1, 3).reshape(N * self.heads, key_len, self.head_dim)
# Attention score
energy = torch.bmm(queries, keys.permute(0, 2, 1)).reshape(N, self.heads, query_len, key_len)
if mask is not None:
energy = energy.masked_fill(mask == 0, float("-1e20"))
attention = torch.softmax(energy / (self.embed_size ** (1 / 2)), dim=3)
# Reshape values for batch matrix multiplication
values = values.permute(0, 2, 1, 3).reshape(N * self.heads, value_len, self.head_dim)
out = torch.bmm(attention.reshape(N * self.heads, query_len, key_len), values).reshape(N, self.heads, query_len, self.head_dim)
out = out.permute(0, 2, 1, 3).reshape(N, query_len, self.embed_size)
out = self.fc_out(out)
return out
# Testing the MultiHeadAttention
if __name__ == "__main__":
embed_size = 256
heads = 8
values = torch.randn(1, 10, embed_size)
keys = torch.randn(1, 10, embed_size)
query = torch.randn(1, 10, embed_size)
mask = None
attention = MultiHeadAttention(embed_size, heads)
out = attention(values, keys, query, mask)
print(out.shape)
2. Transformer为什么Q和K使用不同的权重矩阵生成,为何不能使用同一个值进行自身的点乘
在Transformer模型中,查询(Q, Query)和键(K, Key)使用不同的权重矩阵生成是为了更灵活和有效地捕捉输入序列中的不同特征和关系。这种设计有几个重要的原因:
-
不同的功能需求
查询(Query):用于获取输入序列中某个位置的信息。
键(Key):用于表示输入序列中所有位置的信息,与查询进行对比来计算相似度。
如果查询和键使用同一个权重矩阵,模型在区分和捕捉不同类型的信息时会受到限制。使用不同的权重矩阵允许模型更灵活地调整每个输入位置的信息,从而提高模型的表达能力。 -
增强模型的表达能力
使用不同的权重矩阵能够让查询和键在不同的子空间中进行变换,从而捕捉到更丰富和多样的特征。如果使用相同的权重矩阵,查询和键在相同的子空间中进行变换,可能会丧失这种灵活性,影响模型的性能。 -
避免退化到简单的自相关
如果查询和键使用相同的权重矩阵,注意力机制可能会退化成简单的自相关操作,丧失了对复杂模式和关系的捕捉能力。而使用不同的权重矩阵可以确保注意力机制能够有效区分和处理复杂的序列关系。 -
提高模型的鲁棒性和稳定性
不同的权重矩阵能够提供更多的学习参数,增加模型的容量,使其在面对不同类型的输入数据时更加鲁棒和稳定。这样模型在训练时能够更好地适应和泛化。 -
总结
使用不同的权重矩阵生成查询和键,使得模型可以在不同的子空间中变换输入,捕捉更丰富和多样的特征,并且避免退化成简单的自相关操作。这样不仅增强了模型的表达能力,还提高了模型的鲁棒性和稳定性
3. Transformer计算attention的时候为何选择点乘而不是加法?两者计算复杂度和效果上有什么区别
Transformer模型在计算注意力时选择点乘(点积)而不是加法有几个关键的原因,这涉及到计算复杂度、效果以及理论基础的差异。
- 点乘 vs 加法:计算复杂度
- 点乘注意力(Scaled Dot-Product Attention):
计算复杂度:O(n^2 * d)
其中 n 是序列长度,d 是每个向量的维度。具体步骤包括:计算 Q 和 K 的点积,得到一个 n x n 的矩阵;进行缩放和 softmax 操作;将结果与 V 进行矩阵乘法。 - 加法注意力(Additive Attention):
计算复杂度:O(n^2 * d)
加法注意力通常使用一个小的前馈神经网络来计算注意力分数。具体步骤包括:计算 Q 和 K 的加法,然后通过一个前馈神经网络(通常是一个单隐藏层的MLP);进行 softmax 操作;将结果与 V 进行矩阵乘法。
尽管两者的时间复杂度在形式上相同,但点乘注意力的计算更容易并行化,因为矩阵乘法可以通过优化的线性代数库高效实现。
- 点乘 vs 加法:效果
- 点乘注意力:
更适合在高维空间中操作。点乘注意力在高维空间中能更好地捕捉输入向量间的相似性,因为点乘计算的结果本质上是两个向量的相似度度量。
计算简单,易于实现并行化,因此在实践中通常更高效。 - 加法注意力:
通常用于较低维度的表示(例如在 RNN 中),因为在低维空间中,点乘可能不太稳定或效果不好。
计算复杂,需要通过前馈神经网络来计算相似性度量,增加了模型的复杂度和计算时间。
- 总结
点乘注意力在计算复杂度、实现的并行化和高维度表示上具有优势,是Transformer模型的首选。
加法注意力在低维度表示中表现较好,但计算复杂度更高,实现较为复杂。
点乘注意力易于在现代硬件(如GPU和TPU)上高效实现,使其成为处理大规模数据和训练深度模型的更好选择。
4. 为什么在进行softmax之前需要对attention进行scaled(为什么除以dk的平方根),并使用公式推导进行讲解
在计算Transformer的注意力时,对点积注意力进行缩放(scaled)的主要原因是为了稳定训练过程,防止输入数据的范围过大,导致softmax输出的梯度变得非常小,从而影响训练效率和模型性能。

5.在计算attention score的时候如何对padding做mask操作
在计算注意力分数(attention scores)时,处理填充(padding)是一个重要的步骤,因为填充的部分应该对计算结果没有影响。通常,我们使用掩码(mask)来忽略这些填充位置。
- 掩码的作用
- 防止填充位置影响计算:填充的位置不应该对注意力分数产生影响,因此在计算注意力分数时需要将这些位置的注意力权重设为0。
- 保持模型的一致性:确保模型只关注实际的输入部分,而不是填充的部分。
- 掩码的实现
通常,掩码是一个与注意力分数矩阵形状相同的矩阵,其中填充位置用特定值(如负无穷大)标记,这样在计算softmax时,填充位置的权重会变为0。- 创建掩码
掩码通常是一个布尔矩阵,表示哪些位置是填充的。例如,掩码矩阵的形状为 (batch_size, seq_len, seq_len),其中填充的位置标记为 False,非填充的位置标记为 True。 - 应用掩码
在计算注意力分数时,将掩码应用于点积结果中。具体来说,将掩码中的填充位置设置为一个非常小的值(如 -1e9),这样在进行softmax时,这些位置的注意力权重会变为0
- 创建掩码
- 总结
- 创建掩码:根据填充位置创建掩码矩阵,并将其扩展到正确的形状,以便与注意力分数矩阵对齐。
- 应用掩码:在计算注意力分数时,将掩码应用于点积结果,将填充位置的分数设为一个非常小的值(如 -1e9),这样在进行softmax时,这些位置的注意力权重会变为0。
6. Transformer中的残差结构以及意义。
Transformer中的残差结构(Residual Connection)是一种关键的设计理念,用于提高深度神经网络的训练稳定性和收敛速度。它主要用于每个子模块(如自注意力机制和前馈神经网络)的输出中,将输入直接添加到输出上。
- 残差结构的意义
- 缓解梯度消失问题:
在深度神经网络中,梯度可能在反向传播过程中逐渐消失,使得训练变得困难。残差连接通过直接将输入添加到输出上,使得梯度可以直接通过这些连接流动,从而缓解梯度消失问题。 - 提高训练稳定性:
残差结构使得每一层只需学习输入与输出之间的残差(即变化量),而不是学习完整的映射。这种方式可以更容易地训练深层网络,因为学习残差通常比直接学习完整映射要简单得多。 - 加速收敛:
残差连接可以让模型更快地收敛,因为它使得信息在网络中流动时更为顺畅。网络能够更快地找到合适的表示,进而提高训练效率。 - 支持深层网络:
使用残差连接,网络可以更容易地堆叠更多的层。残差连接通过提供直接路径,使得深层网络更容易训练,并保持较好的性能
- 缓解梯度消失问题:
7. 为什么transformer块使用LayerNorm而不是BatchNorm?LayerNorm 在Transformer的位置是哪里?
在Transformer中使用Layer Normalization(LayerNorm)而不是Batch Normalization(BatchNorm)主要是因为它们的工作原理和适用场景有所不同。以下是详细的解释以及LayerNorm在Transformer中的具体位置。
7.1为什么使用LayerNorm而不是BatchNorm?
- 适用场景不同:
- BatchNorm:BatchNorm通过对每个mini-batch的特征进行归一化来稳定训练过程。这种方法依赖于mini-batch的大小和分布,在处理变长序列或不规则批次大小时可能会出现问题。
- LayerNorm:LayerNorm对每个样本的特征进行归一化,不依赖于mini-batch的大小和分布。这使得LayerNorm在处理变长序列和不规则批次大小时更加稳定和有效。
- 计算方式:
- BatchNorm:在mini-batch内计算均值和方差进行归一化。在RNN或Transformer这样的序列模型中,不同序列的长度可能不同,导致batch内的数据不一致,影响BatchNorm的效果。
- LayerNorm:在单个样本的特征维度上计算均值和方差进行归一化。这使得LayerNorm在处理序列数据时更加一致和可靠。
- 处理序列数据:
- BatchNorm的计算依赖于批次内的统计信息,而序列数据的长度和顺序可能会变化,这使得BatchNorm在处理序列数据时表现不佳。
- LayerNorm在每个样本的特征维度上进行归一化,独立于序列的长度和顺序,因此在处理序列数据时更加适合。
7.2LayerNorm在Transformer中的位置
在Transformer中,LayerNorm通常用于每个子模块(子层)的输出和残差连接(Residual Connection)之间。具体来说,LayerNorm出现在以下两个主要位置:
- 自注意力机制之后:
自注意力机制的输出通过残差连接加回到输入上,然后经过LayerNorm进行归一化。
attn_output, _ = self.multihead_attention(x, x, x, attn_mask=src_mask)
x = self.layer_norm1(x + self.dropout(attn_output))
- 前馈神经网络之后:
前馈神经网络的输出通过残差连接加回到输入上,然后经过LayerNorm进行归一化。
ffn_output = self.ffn(x)
x = self.layer_norm2(x + self.dropout(ffn_output))
8. 简单描述一下Transformer中的前馈神经网络?使用了什么激活函数?相关优缺点?
Transformer中的前馈神经网络(Feed-Forward Neural Network,FFN)是每个Encoder和Decoder层中的一个重要组成部分。它用于对每个位置的特征表示进行进一步的非线性变换。以下是对Transformer中前馈神经网络的简单描述、所使用的激活函数以及其相关优缺点。
- 前馈神经网络的结构
Transformer中的前馈神经网络通常由两个线性变换(全连接层)和一个激活函数组成。每个位置的特征表示都会独立地通过相同的前馈神经网络进行处理。其结构可以表示为:
F F N ( x ) = m a x ( 0 , x W 1 + b 1 ) W 2 + b 2 FFN(x) = max(0, xW_1 + b_1)W_2 + b_2 FFN(x)=max(0,xW1+b1)W2+b2
其中,
x 是输入特征表示。
W 1 , W 2 W_1, W_2 W1,W2是权重矩阵。
b 1 , b 2 b_1, b_2 b1,b2是偏置向量。
m a x ( 0 , . ) max(0, .) max(0,.) 表示ReLU激活函数。
在Transformer的前馈神经网络中,通常使用的是ReLU(Rectified Linear Unit)激活函数。ReLU激活函数的定义为:

ReLU函数将所有负值映射为零,并保留正值。
- 前馈神经网络的优点
- 计算效率高:ReLU激活函数的计算非常简单,只需要比较输入值与零,计算效率高。
- 减轻梯度消失问题:与传统的激活函数(如Sigmoid和Tanh)相比,ReLU激活函数在正值区间具有恒定的梯度,减轻了梯度消失问题,使得深层网络更容易训练。
- 简单且效果好:前馈神经网络结构简单,但在实践中效果很好,能够有效地对特征表示进行非线性变换。
- 前馈神经网络的缺点
- 稀疏激活:ReLU会将负值区域的激活设置为零,可能导致一些神经元永远不被激活,尤其是在初始权重设置不当的情况下。
- 非平滑性:ReLU在零点处不可导,尽管这在大多数情况下不是问题,但在某些优化算法中可能会引发问题。
- 总结
Transformer中的前馈神经网络由两个线性变换和一个ReLU激活函数组成,主要用于对每个位置的特征表示进行非线性变换。ReLU激活函数具有计算效率高、减轻梯度消失问题等优点,但也存在稀疏激活和非平滑性的问题。前馈神经网络在结构上非常简单,但在实践中效果显著,有助于模型提取更高层次的特征表示。
9.Decoder阶段的多头自注意力和encoder的多头自注意力有什么区别?(为什么需要decoder自注意力需要进行 sequence mask)
在Transformer模型中,Decoder阶段的多头自注意力机制和Encoder阶段的多头自注意力机制有一些关键区别,主要在于它们处理数据的方式和目的。以下是详细的解释:
9.1 Encoder阶段的多头自注意力机制
在Encoder阶段,每个位置的输入特征都可以在整个输入序列中进行自注意力计算。这意味着每个词(或标记)都能够关注输入序列中所有其他词的信息,以便更好地捕捉全局上下文信息。
- 主要特点:
- 全局自注意力:每个词可以与输入序列中的任何其他词交互,没有遮掩(masking)。
- 并行处理:所有位置可以并行处理,因为它们没有顺序依赖。
9.2 Decoder阶段的多头自注意力机制
在Decoder阶段,每个位置的输入特征只能关注目标序列中当前位置及其之前的位置。这是因为Decoder在生成每个词时,只能依赖于之前生成的词,而不能“看到”未来的词(即当前正在生成的词的后续部分)。这需要通过序列掩码(sequence mask)来实现。
- 主要特点:
- 局部自注意力:每个词只能关注目标序列中当前位置及其之前的词,不能看到未来的词。
- 顺序依赖:由于序列生成的顺序依赖,每个位置的计算依赖于之前的位置,因此需要使用序列掩码。
9.3 为什么Decoder的自注意力需要进行序列掩码(sequence mask)
序列掩码(sequence mask)在Decoder的自注意力机制中起到了关键作用,用于屏蔽未来的信息,以确保Decoder在生成目标序列时只能依赖于之前生成的词。这种屏蔽机制被称为causal masking或look-ahead masking。
- 原因:
- 防止信息泄露:在序列生成任务中(如机器翻译),Decoder在生成当前词时,不应该看到未来的词,以避免信息泄露。这意味着,生成每个词时,Decoder只能访问该词之前的词。
- 保持顺序依赖:生成目标序列时,Decoder需要按顺序逐词生成。因此,当前词的生成只能依赖之前生成的词,不能依赖未来的词。这需要通过掩码机制来实现。