基于卡尔曼滤波器的PID控制系统结构如图1所示。
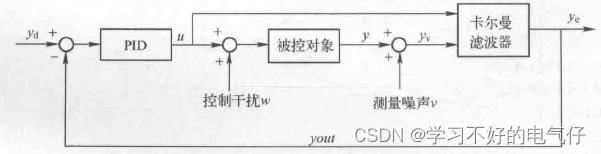
图1 基于卡尔曼滤波器的PID控制
被控对象为二阶传递函数:

离散化结果与“基于卡尔曼滤波器的PID控制-1”的仿真实例相同。采样时间为1ms。控制干扰信号w(k)和测量噪声信号v(k)幅值均为0.002的白噪声信号,输入信号为一阶跃信号。采用卡尔曼滤波器实现信号的滤波,取 =1,R=1。仿真时间为1s。分两种情况进行仿真:M=1时为未加滤波,M=2时为加滤波。在PID控制器中,取kp=8.0 ,ki =0.80 ,kd= 0.20。加入滤波器前后PID阶跃响应如图2和图3所示,仿真结果表明,通过采用滤波器使控制效果明显改善。
本方法的不足之处是设计卡尔曼滤波器时需要被控对象的精确模型。
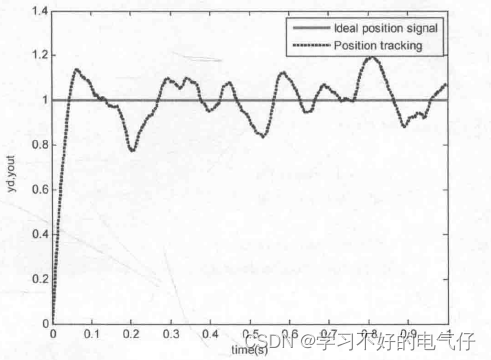
图2 无滤波器时PID控制阶跃响应(M=1)
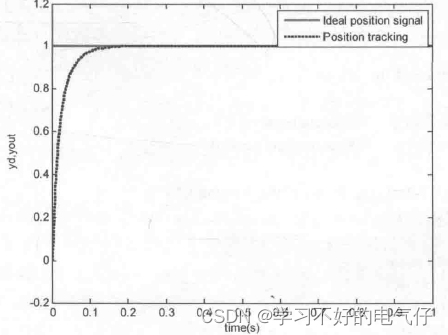
图3 加入滤波器后PID控制阶跃响应(M=2)
仿真程序:
%Discrete Kalman filter for PID control
%Reference kalman_2rank.m
%x=Ax+B(u+w(k));
%y-Cx+DHv(k)
clear all;
close all;
ts=0.001;
%Continuous Plant
a=25;b=133;
sys=tf(b,[1,a,0]);
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v);
A1=[0 1;0 -a];
B1=[0;b];C1=[1 0];D1=[0];
[A,B.C,D]=c2dm(A1,B1,C1,D1,ts,z);
Q=1; %Covariances of w
R=1; %Covariances ofv
P=B*Q*B'; %Initial crror covariance
x=zeros(2,1); %Initial condition on the state
u_1=0;u_2=0;
y_1=0;y_2=0;
ei=0;
error_1=0;
for k=1:1:1000
time(k)=k*ts;
yd(k)=1;
kp=8.0;ki=0.80;kd=0.20;
w(k)=0.002*rands(1); %Process noise on u
v(k)=0.002*rands(1); %Measurement noise on y
y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;yv(k)-y(k)+v(k);
%Measurement update
Mn=P*C/(C*P*C+R);
P=A*P*A'+B*Q*B';
P=(eye(2)-Mn*C)*P;
x=A*x+Mn*(yv(k)-C*A*x);
ye(k)=C*x+D;%Filtered value
M=1;
if M==1 %No kalman filter
yout(k)=yv(k);
else if M=-2 %Using kalman filter
yout(k)=ye(k);
end
error(k)=yd(k)-yout(k);
ei=ei+error(k)*ts;
u(k)=kp*error(k)+ki*ei+kd*(error(k)-error_1)ts; %PID
u(k)=u(k)+w(k);
errcov(k)=C*P*C'; %Covariance of estimation error
%Time update
x=A*x+B*u(k);
u_2=u_l;u_1=u(k);
y 2=y_1;y_1=yout(k);
error_1=error(k);
end
figure(1);
plot(time,yd,'r',time,yout,'k:',linewidth',2);
xlabel('time(s));ylabel('yd,yout');
legend('Ideal Dosition signal''Position tracking'):

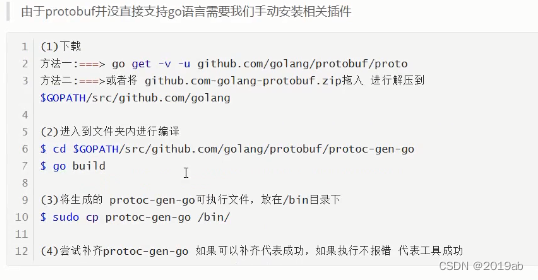
![[个人备忘]go包管理](https://img-blog.csdnimg.cn/img_convert/79deb30f15f682ae005f6f641e12e36f.png)