文章目录
- 1.前言
- 2.芯片介绍
- 2.1 芯片简介
- 2.2 硬件特性
- 2.3 软件特性
- 3.测试环境
- 3.1 工具
- 3.2 架构
- 4.软件驱动
- 4.1 SPI
- 4.2 CTRL引脚
- 4.3 寄存器
- 4.4 双极性步进电机驱动流程
- 5.测试情况
- 6.参考资料
1.前言
最近有些做电磁阀和调光大灯的客户需要寻找国产的双极性步进电机驱动,笔者给客户推荐了纳芯微的NSD8381。由于是第一次接触这类芯片,笔者找原厂申请了NSD8381开发板,搭配淘宝买的电机以及S32K144EVB,简单进行了软件调试,便于更好的了解该芯片。
2.芯片介绍
2.1 芯片简介
NSD8308是纳芯微主推的双极性步进电机驱动,目标应用有汽车调光电机,HUD角度调整电机驱动器、电磁阀等。
该芯片最高支持1/32微步的双极性步进电机驱动,让电机更平滑的运动。最大驱动电流1.35A。此外,该设备还具备SPI接口,用于控制输出电流以及设置堵转保护并提供诊断信息。
2.2 硬件特性
- 可以根据需要配置为双极性步进驱动模式或双H桥模式或四半桥模式,以支持不同的负载。
- 4.5V至36V的宽工作电压范围,支持最大1.35A的可编程电流。
- 逻辑输入引脚 (CTRL1/2/3/4): 可编程用于步进模式的STEP/DIR/HOLD输入或直接半桥控制。
- 故障指示输出 (DOUT1/DOUT2): 根据SPI设置,可用作故障指示或内部PWM信号输出。
- 支持过温,过流保护,以及开路,堵转检测。
- 提供VQFN40和VQFN32两种封装。
2.3 软件特性
- SPI接口:24bit/帧、4MHz的SPI接口进行配置和通信。
- 寄存器配置:具有丰富的寄存器配置选项,包括电流设定、步进模式选择、输出阶段配置等。
- 故障诊断:可以通过SPI读取和清除故障状态,包括过流、过温等。
- 电流调节:内置PWM控制器和电流控制环,实现精确的电流调节。
- 步进模式:支持全步、半步、1/4步、1/8微步、1/16微步和1/32微步等多种步进模式。
3.测试环境
3.1 工具
测试需要的工具为:
- NSD8381官方demo板
![NSD8381 demo board[图片来源于纳芯微]](https://img-blog.csdnimg.cn/img_convert/6647f5e0bc7971401b28e663bf4a9619.png)
- S32K144EVB-Q100
- 三拓Nema14混合式35HS步进电机
3.2 架构
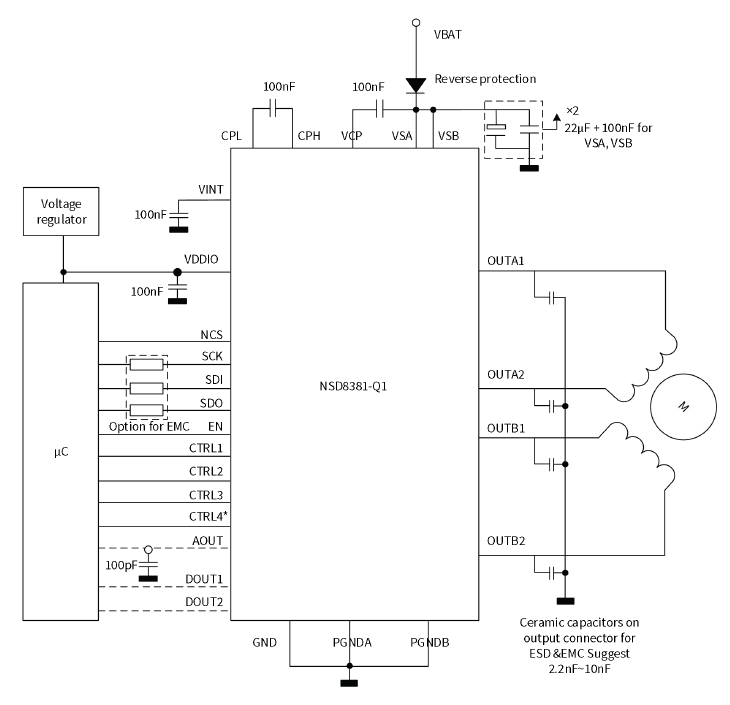
整个测试电路的架构和NSD8381的推荐电路图一致,如下所示:
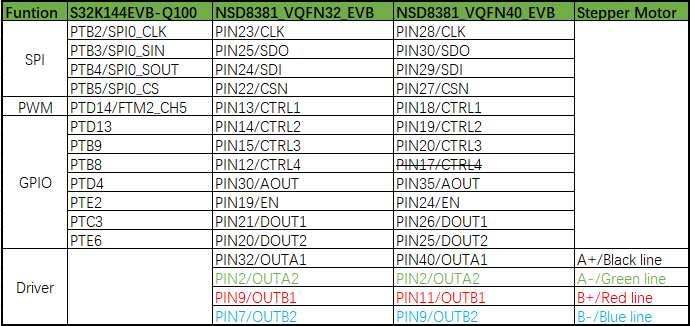
NSD8381官方demo板有两种封装,和S32K144EVB以及步进电机的引脚连接如下图所示:
4.软件驱动
4.1 SPI
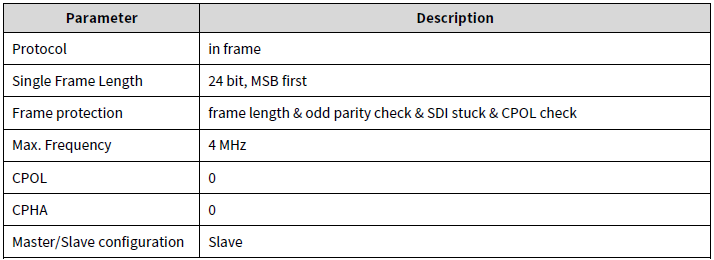
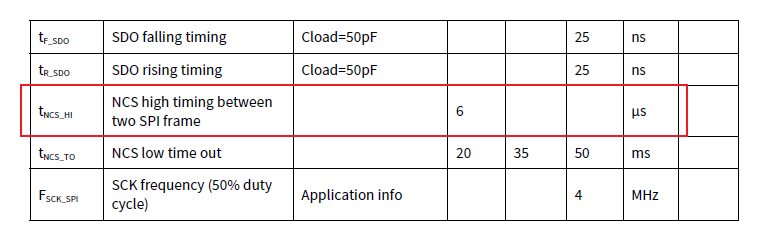
NSD8381的SPI接口要求如下图:
NSD8381通过SPI接收的一帧数据为24bit,组成部分如下:
- MCU发给NSD8381的帧结构:
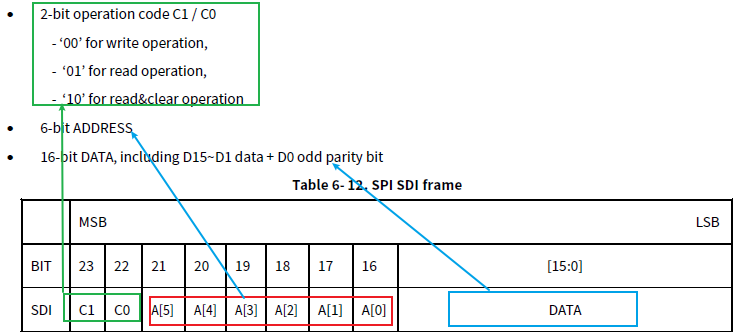
注意最低bit是奇数校验,用来确保一帧SPI数据中值为1的数量为奇数。具体计算方式为,计算SPI一帧中bit23到bit1的值为1的数量,如果总数为偶数,bit0赋值为1.否则赋值为0。
官方驱动提供的奇位校验代码如下:
void Parity_check(uint8_t (*num))
{
uint8_t i,j,k;
//uint32_t result;
k=0;
for(j=0;j<3;j++)
{
for(i=0;i<8;i++)
{
k+=(uint8_t)(((uint8_t)(*(num+j)>>i))&0x01);
}
}
if((k & 0x01)==0)
{
*(num+2)=*(num+2)+1;
}
}
- NSD8381返回给MCU的帧结构:
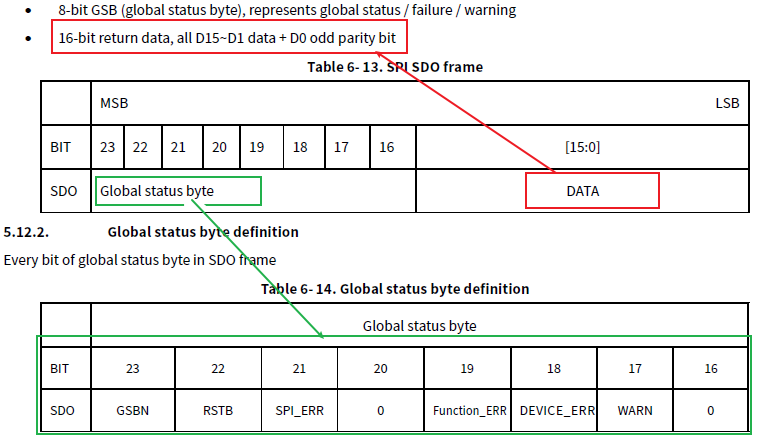
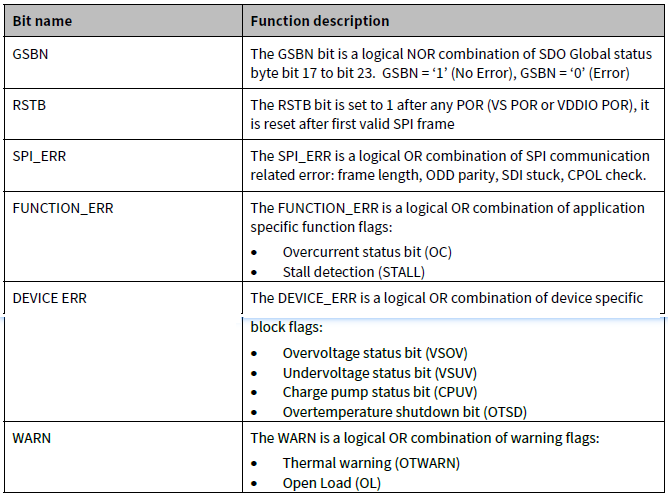
- 其中Global status byte的详细说明如下表:
S32K144的SPI外设配置如下:
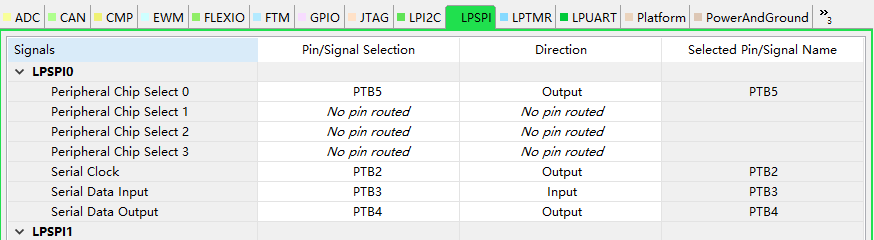

- 这里选择8bits/frames是因为S32K144的RTD3.0不支持24bits/frame,填写24bits/frame会导致SPI数据发不出来。
- 勾选pcs连续是因为NSD8381数据手册要求PCS的高电平持续时间最小为6us。如果不勾选,会导致发送的三个字节数据之间的pcs有拉高操作,NSD8381会回复SPI ERR。
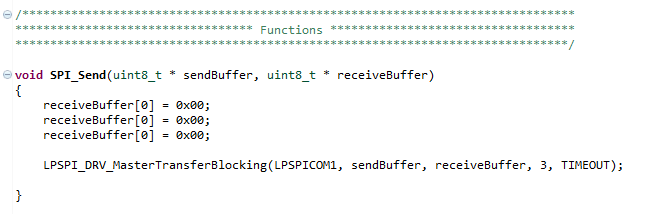
SPI发送函数定义如下,使用3个元素的8bit数组存放数据:
4.2 CTRL引脚
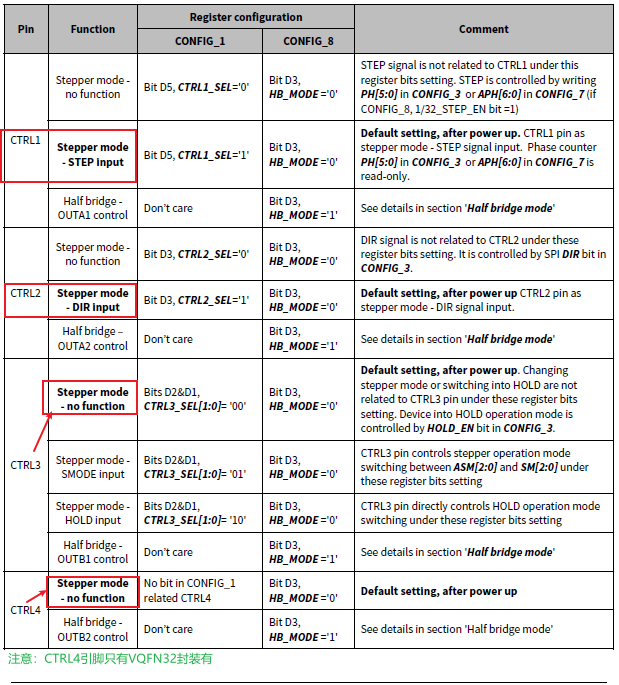
NSD8381的CTRL引脚的功能如下,使用双极性步进电机驱动模式时,推荐CTRL1用作步进输入,CTRL2用作方向控制,详细说明参考NSD8381数据手册。
对CTR1引脚进行PWM输入的配置如下:
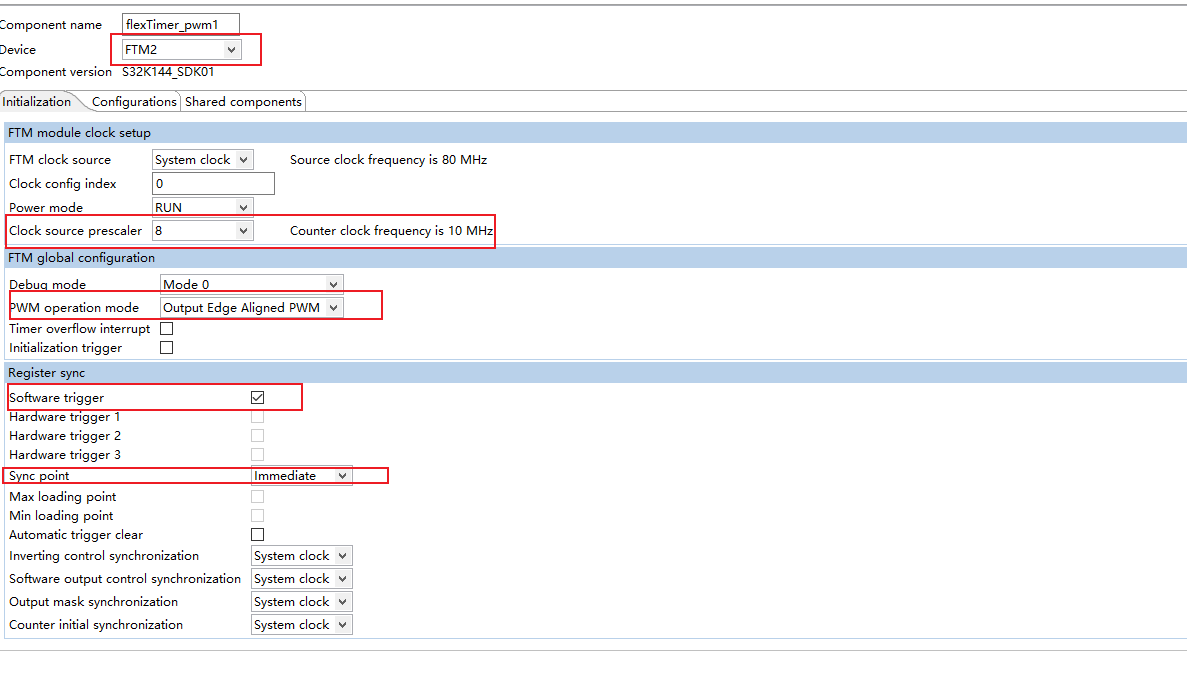
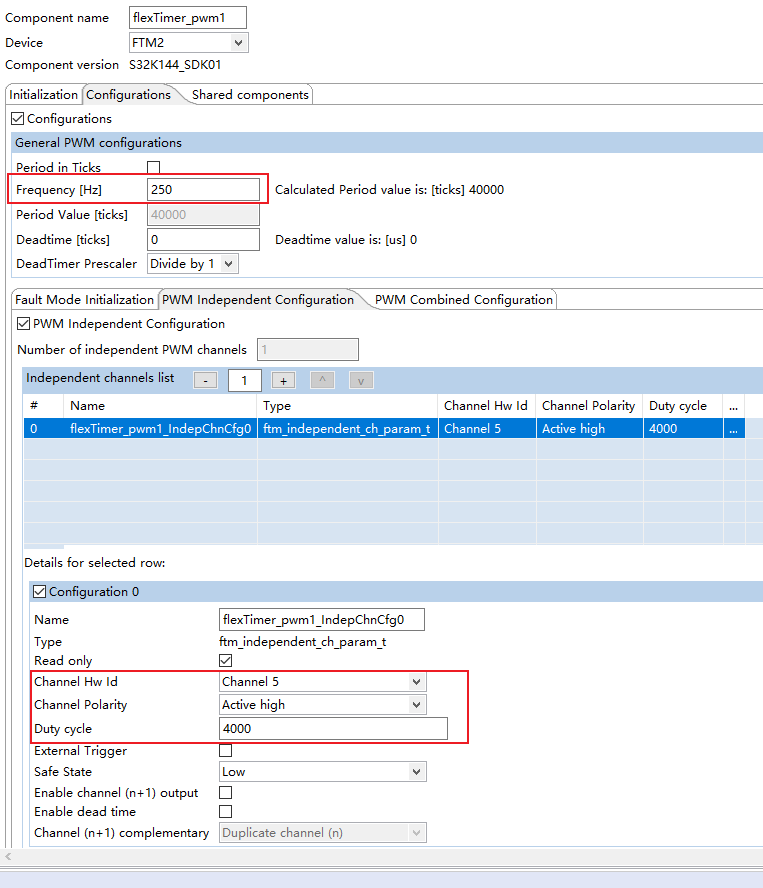
这里PWM初始化时,设置的MOD值为4000,后续更改PWM频率时要确定CNT值大于4000,否则会导致PWM引脚一直输出高电平。
4.3 寄存器
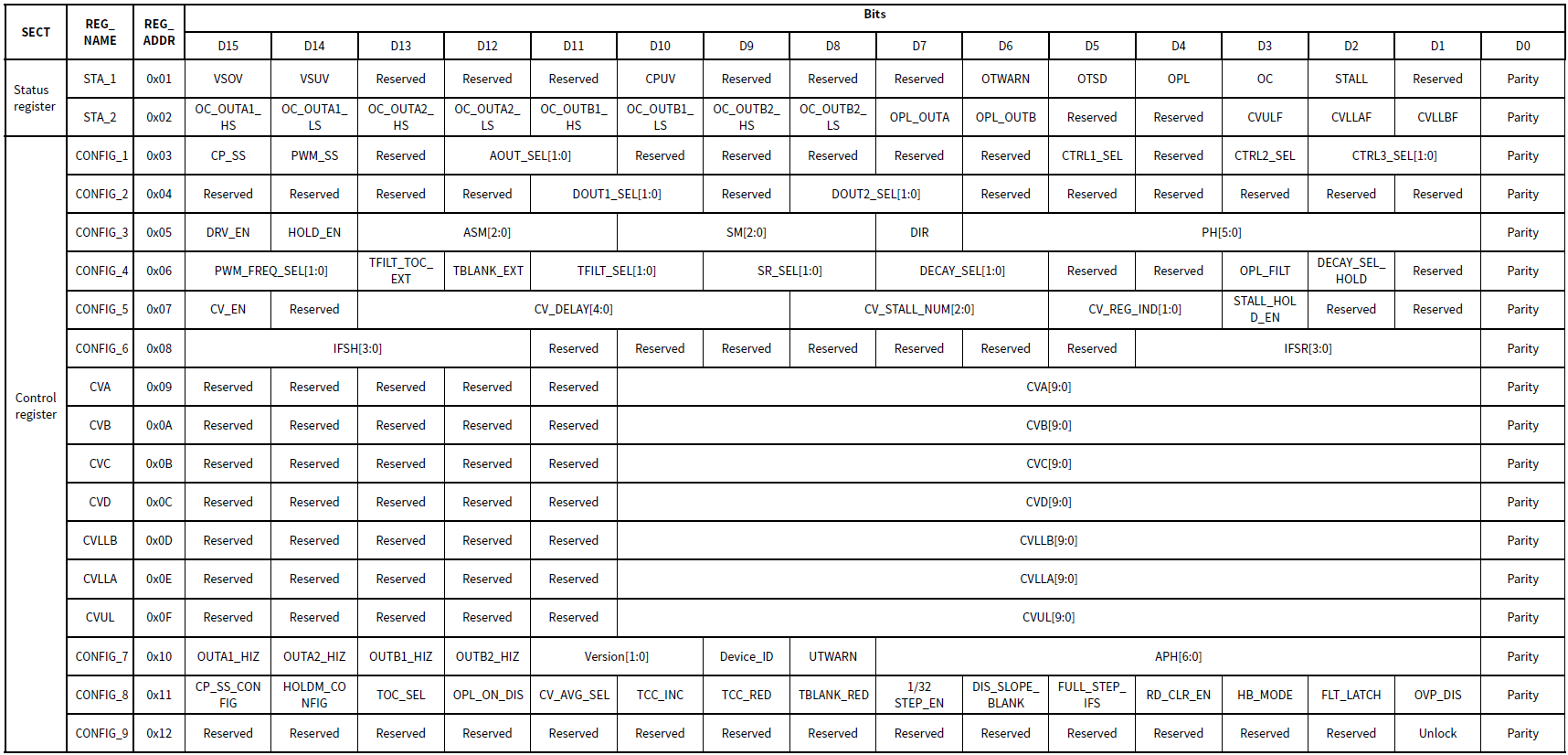
上图为NSD8381的寄存器,主要有如下几种:
状态寄存器 (Status Registers)
- STA_1 (0x01): 包含电源、过温、开路负载、过流和堵转等状态标志。例如,OC位(D3)表示过流状态,STALL位(D2)表示堵转状态。
- STA_2 (0x02): 包含各半桥臂的过流状态、开路负载状态、BEMF电压转换超出上限和下限的状态标志。
控制寄存器 (Control Registers)
- CONFIG_1 (0x03): 控制充电泵和电流调节的PWM频率,以及模拟输出选择。例如,CP_SS位(D15)控制充电泵频率是否固定,PWM_SS位(D14)控制电流调节PWM频率是否固定。
- CONFIG_2 (0x04): 配置DOUT1和DOUT2的功能选择。例如,DOUT1_SEL[1:0]位(D11-D10)选择DOUT1引脚的功能。
- CONFIG_3 (0x05): 控制驱动使能、HOLD模式、步进模式和方向控制。例如,DRV_EN位(D15)控制输出阶段是否使能。
- CONFIG_4 (0x06): 设置PWM频率、滤波时间、斜率选择和衰减模式。例如,PWM_FREQ_SEL[1:0]位(D15-D14)选择电流调节PWM的频率。
- CONFIG_5 (0x07): 控制BEMF电压转换功能、延迟时间和堵转检测。例如,CV_EN位(D15)使能BEMF电压转换功能。
- CONFIG_6 (0x08): 设置正常运行模式和HOLD模式下的全尺寸电流。例如,IFSH[3:0]位(D15-D12)设置HOLD模式下的全尺寸电流。
- CONFIG_7 (0x10): 控制半桥的HIZ状态、版本信息、设备ID和UTWARN标志。例如,OUTA1_HIZ位(D15)控制半桥OUTA1是否置为高阻态。
- CONFIG_8 (0x11): 控制充电泵频率、HOLD模式功能、过流保护滤波时间等。例如,CP_SS_CONFIG位(D15)选择充电泵的频谱扩展调制频率。
- CONFIG_9 (0x12): 提供CONFIG_8寄存器的锁定/解锁控制。例如,UNLOCK位(D1)用于解锁CONFIG_8寄存器的特定位,允许写入操作。
BEMF电压转换寄存器 (BEMF Voltage Conversion Registers)
- CVA, CVB, CVC, CVD (0x09 to 0x0C): 存储在不同相位计数器位置下的BEMF电压转换的数字值。这些寄存器的值用于堵转检测和电机性能分析。
低限和高限寄存器 (Low and High Limit Registers)
- CVLLB (0x0D): 设置BEMF电压低限B阈值。
- CVLLA (0x0E): 设置BEMF电压低限A阈值。
- CVUL (0x0F): 设置BEMF电压高限阈值。
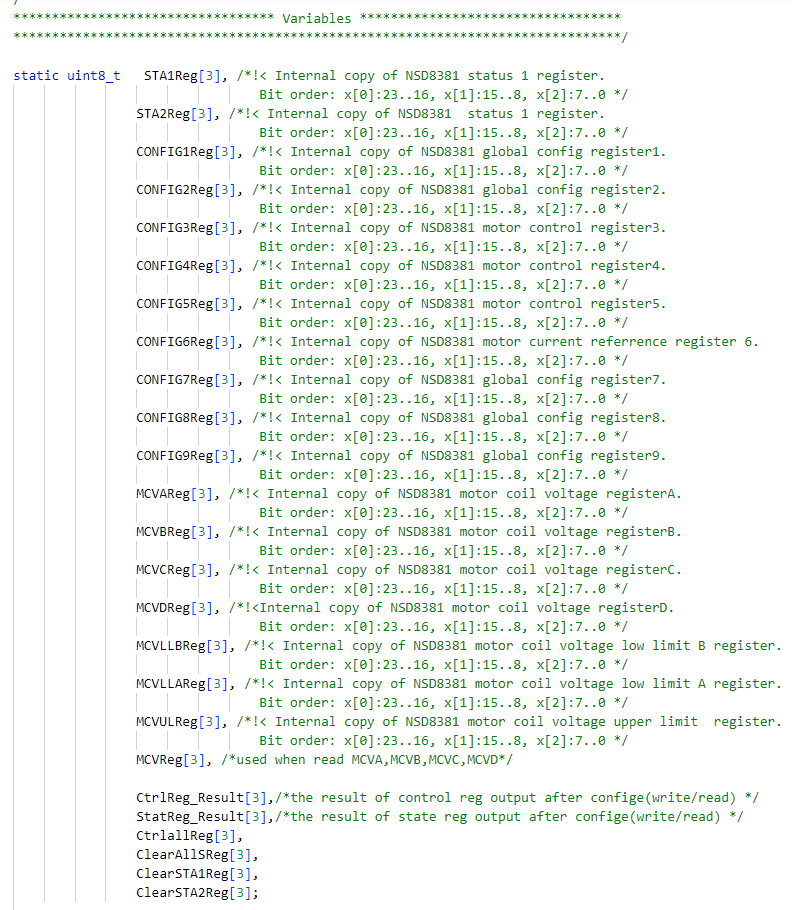
寄存器地址对应的代码如下:
void NSD8381drv_Init (void)
{
uint8_t i;
for (i = 0U; i < 3U; i++)
{
STA1Reg[i] = 0U;
STA2Reg[i] = 0U;
CONFIG1Reg[i] = 0U;
CONFIG2Reg[i] = 0U;
CONFIG3Reg[i] = 0U;
CONFIG4Reg[i] = 0U;
CONFIG5Reg[i] = 0U;
CONFIG6Reg[i] = 0U;
CONFIG7Reg[i] = 0U;
CONFIG8Reg[i] = 0U;
CONFIG9Reg[i] = 0U;
MCVAReg[i] =0U;
MCVBReg[i] =0U;
MCVCReg[i] =0U;
MCVDReg[i] =0U;
MCVReg[i]=0u;
MCVLLBReg[i]=0U;
MCVLLAReg[i]=0U;
MCVULReg[i]=0U;
CtrlReg_Result[i] = 0U;
StatReg_Result[i] = 0U;
CtrlallReg[i]=0U;
ClearAllSReg[i]=0U;
ClearSTA1Reg[i]=0U;
ClearSTA2Reg[i]=0U;
}
// register address
STA1Reg[0] = (uint8_t)(0x01U);
STA2Reg[0] = (uint8_t)(0x02U);
CONFIG1Reg[0] = (uint8_t)(0x03U);
CONFIG2Reg[0] = (uint8_t)(0x04U);
CONFIG3Reg[0] = (uint8_t)(0x05U);
CONFIG4Reg[0] = (uint8_t)(0x06U);
CONFIG5Reg[0] = (uint8_t)(0x07U);
CONFIG6Reg[0] = (uint8_t)(0x08U);
MCVAReg[0]=(uint8_t)(0x09U);
MCVBReg[0]=(uint8_t)(0x0AU);
MCVCReg[0]=(uint8_t)(0x0BU);
MCVDReg[0]=(uint8_t)(0x0CU);
MCVLLBReg[0]=(uint8_t)(0x0DU);
MCVLLAReg[0]= (uint8_t)(0x0EU);
MCVULReg[0]= (uint8_t)(0x0FU);
CONFIG7Reg[0] = (uint8_t)(0x10U);
CONFIG8Reg[0] = (uint8_t)(0x11U);
CONFIG9Reg[0] = (uint8_t)(0x12U);
}
4.4 双极性步进电机驱动流程
NSD8381用作双极性步进电机驱动时的驱动流程图如下:
![双极性步电机驱动流程[图片来源于纳芯微]](https://img-blog.csdnimg.cn/img_convert/780dd2cf647096f967fdada8e29ec17d.png)
这部分的流程代码如下,未包含堵转检测功能,如果想使用堵转检测功能,请查看文末的参考资料。
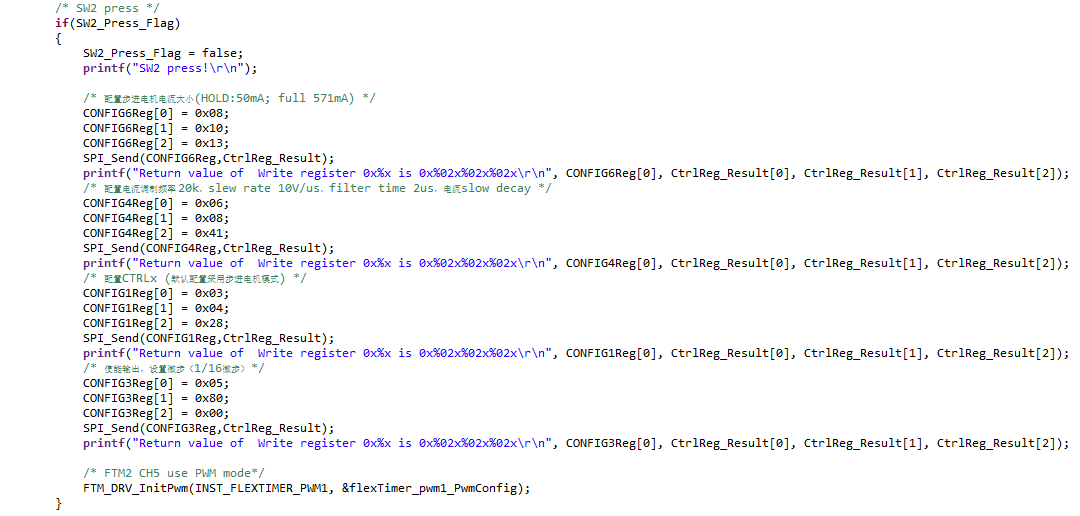
5.测试情况
最终完整的工程功能为:
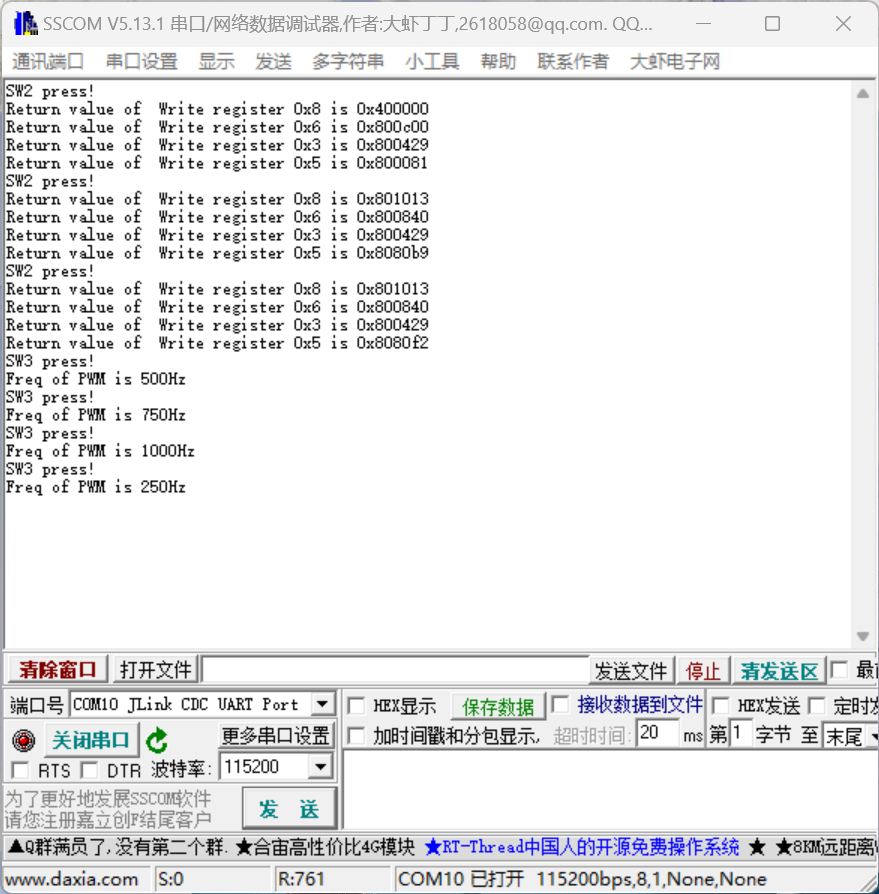
- 按键按键SW2,执行NSD8381初始化流程,并且CTRL1输入的PWM频率为250Hz。
- 按下按键SW3,改变CTRL2输入的PWM波频率,每次增加250Hz,如果超过1000Hz,恢复到250Hz。
SPI发送的数据波形如下图:
其中,黄色为CLK波形,紫色为数据波形,蓝色为片选波形。
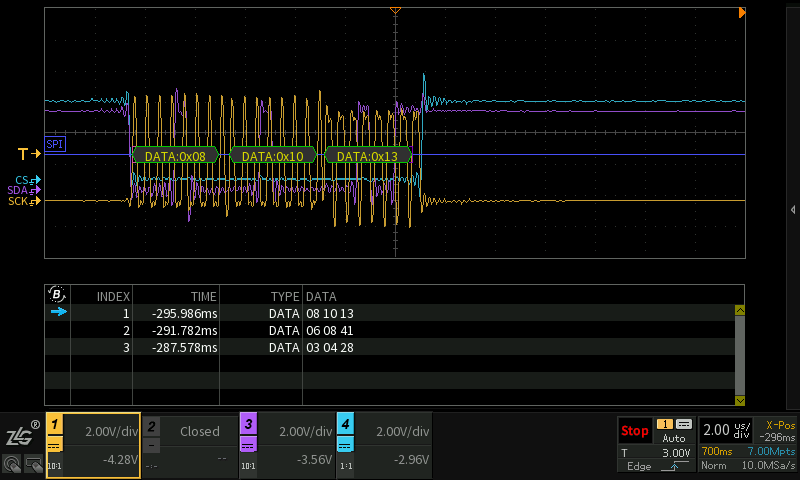
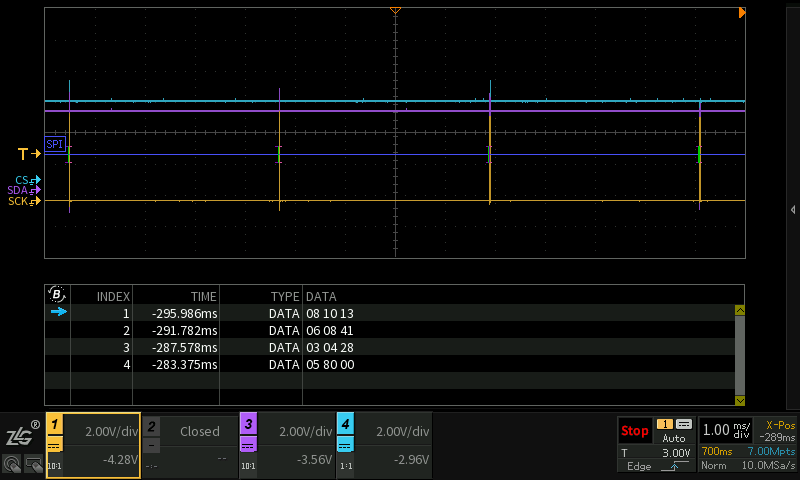
测试时的串口打印信息如下:
测试的视频如下:
NSD8381
工程已放到百度网盘,链接如下:
- 链接: https://pan.baidu.com/s/1K2bTEg-X7n8COv5maCWSlQ
- 提取码: vg2w
6.参考资料
- 数据手册:
https://www.novosns.com/Public/Uploads/uploadfile/files/20240618/NSD8381Datasheet_version_Rev1.0.pdf
- 步进电机驱动NSD8381调试指南:
https://www.novosns.com/technical-articles-385