操纵杆

ISAAC教程合集地址: https://blog.csdn.net/kunhe0512/category_12163211.html
文章目录
- 操纵杆
- 使用游戏机操纵杆
- 使用其他操纵杆
使用 Playstation 操纵杆很容易控制运行 Isaac SDK 的机器人,但也可以使用其他控制器。
使用游戏机操纵杆
按照以下步骤校准您的 Playstation 操纵杆。
- 使用以下命令安装操纵杆校准程序:
sudo apt-get install joystick
-
将操纵杆作为蓝牙外围设备配对。
-
使用以下命令运行校准程序:
jstest-gtk
-
找到您的操纵杆并记下设备 ID 以备后用。
-
选择您的操纵杆并单击“属性”。
-
单击校准并按照说明进行操作。
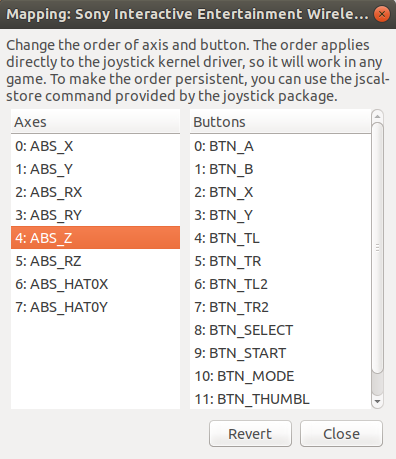
如果摇杆通过USB线连接到桌面,您可能需要调整Mapping。 确保 ABS_Z 被向下拖动到轴号 3 以下。
- 使用以下命令存储校准:
sudo jscal-store /dev/input/js0
使用其他操纵杆
如果您使用的不是 PlayStation 游戏杆,您的按键映射可能会有所不同。
- 要重新映射,如果需要,请在机器人上运行以下命令:
bob@jetson:~/$ sudo apt install jstest-gtk
-
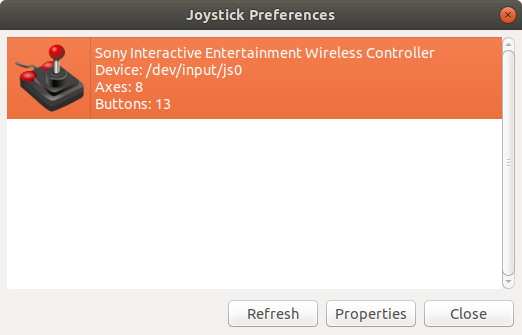
运行jstest-gtk应用程序,在界面中双击你的摇杆,如下图所示:
-
使用操纵杆上的按钮和其他控件来确定它们中的哪些触发此界面中的哪些控件:
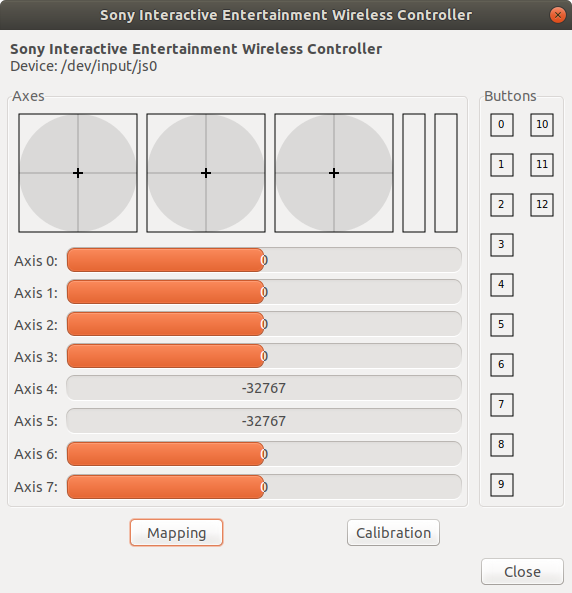
单击映射以重新映射控件。 或者,在 isaac.navigation.RobotRemoteControl 中,根据需要更新 manual_button、autonomous_button、move_axes 和 rotate_axes 值。 有关详细信息,请参阅组件 API 概述。
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561






![[LeetCode]2319. 判断矩阵是否是一个 X 矩阵](https://img-blog.csdnimg.cn/img_convert/a7398d2e17da5473878d8b72610aff55.jpeg)