近期伦敦国王学院罗山教授和清华大学计算机系方斌在IEEE RAL联合发表了“视触觉传感器仿真”的论文研究工作"Tacchi: A Pluggable and Low Computational Cost Elastomer Deformation Simulator for Optical Tactile Sensors"。
https://ieeexplore.ieee.org/document/10017344
研究背景
视触觉传感器是机器人研究的一个新型方向,这类传感器利用视觉图像作为传感信息提供触觉感知。对于这类传感器的仿真主要利用光学仿真或基于数据驱动方法的图像处理,没有对传感器的弹性形变进行仿真;有的仿真方法采用有限元法,但是计算成本高速度慢。本文提出了基于最小二乘物质点法(MLS-MPM)与平行计算仿真器Taichi的视触觉传感器仿真器——Tacchi。该仿真器不仅能基于弹性体仿真提供高质量的仿真触觉图片,还能仿真实际物体的粗糙表面。作者将Tacchi与其他仿真器在图片相似度与SimReal学习方面进行了比较。
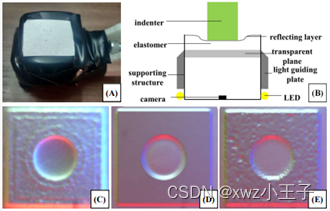
图1.传感器结构。真实触觉图片与不同方法的仿真触觉图片对比。
方法介绍
Tacchi仿真器工作原理如图2所示。
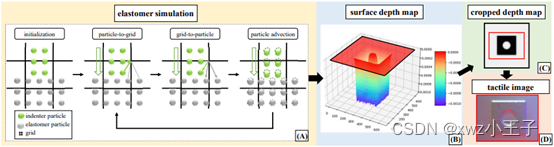
图2. Tacchi仿真策略示意图。
首先,利用最小二乘物质点法(MPM)仿真生成形变的弹性体。如图2-A所示,最小二乘物质点法利用粒子代表物体(灰色弹性体与绿色探针),另外在工作空间内设定虚拟网格,每个粒子与网格节点都可以携带物质信息(附近的质量、形变梯度等)。在仿真过程中,首先携带所有信息的粒子将信息以插值的方式传递到附近的网格节点中,接下来节点将信息传递回附近的粒子,在这个过程中弹性形变所引起的信息变化将会考虑,如形变梯度导致的局部速度变化。最后根据粒子得到的信息进行位移,以此来仿真弹性体形变。
接下来用弹性体最上面的粒子代表弹性体表面,根据粒子三维位置利用插值生产深度图,并利用光学方法渲染成仿真触觉图片。
需要注意的是,初始化的粒子密度不同,生成的仿真触觉图片也不相同。较低的粒子密度会导致粗糙的表面,而较高的粒子密度会导致光滑的表面,作者在实验中验证了这一结论,并利用其生成了逼真的仿真图片。
另外,Tacchi是一个可以和主流机器人仿真器(如Gazebo,MuJoCo)进行联合仿真的仿真器。在这种联合仿真过程中,Tacchi负责根据机器人仿真器提供的传感器与探针的相对位置生成触觉图片,而机器人仿真器对其他机器人部分的运动进行仿真。联合仿真策略如图3所示。
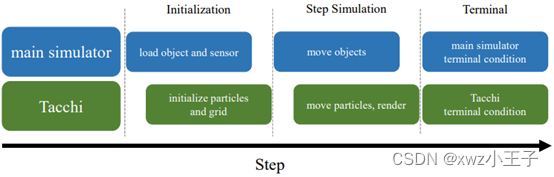
图3.联合仿真策略。
实验结果
首先作者展示了实际触觉图片与不同方法的仿真图片,图片如图4所示。
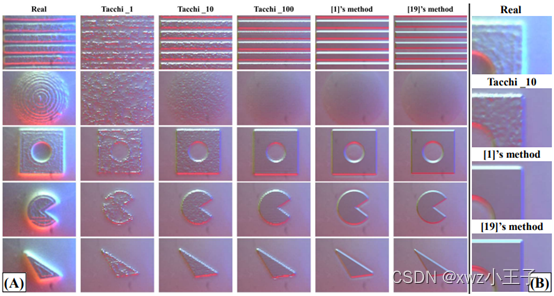
图4.实际触觉图片与不同方法的仿真图片。
如图4所示,与其他方法相比,Tacchi可以生成更高质量的仿真触觉图片,而在Tacchi生成的图片中,粒子密度大会生成光滑的图片,而粒子密度小,物体表面会很粗糙。适当的表面粗糙度可以增加触觉图片拟真度。
其次作者利用图片相似度判准(SSIM, PSNR, MAE)与SimReal识别任务比较了不同方法的仿真图片,结果如图5所示,说明Tacchi与其他仿真器相比可以生成更逼真的仿真触觉图片。

图5. Tacchi与其他仿真器的比较。