并联机器人轨迹规划原理
轨迹规划:并联机器人的轨迹规划相比于串联机器人更加严苛,因为在大多数工作场合都有高速、高精度、轻载的特征。其一般运动轨迹为 Point-To-Point,对这始末两点的轨迹规划在 Delta 机器人乃至所有机器人领域具有重要的意义,这直接影响机器人的工作节拍、动态性能、运动控制。

对于每一段轨迹,末端执行器抓起和放下经历:静止启动—高速运行—减速停止这一过程。为了避免对机器太大的冲击,保证运动的平稳性,末端的初始和终止时刻的速度、加速度应都为零,这样轨迹函数关于时间的一阶和二阶导数必然是连续的,能够避免机器人启动和停止时的冲击,对设备造成损坏。因此,对于轨迹函数中的时间、 (角)位移、速度、加速度有如下要求:

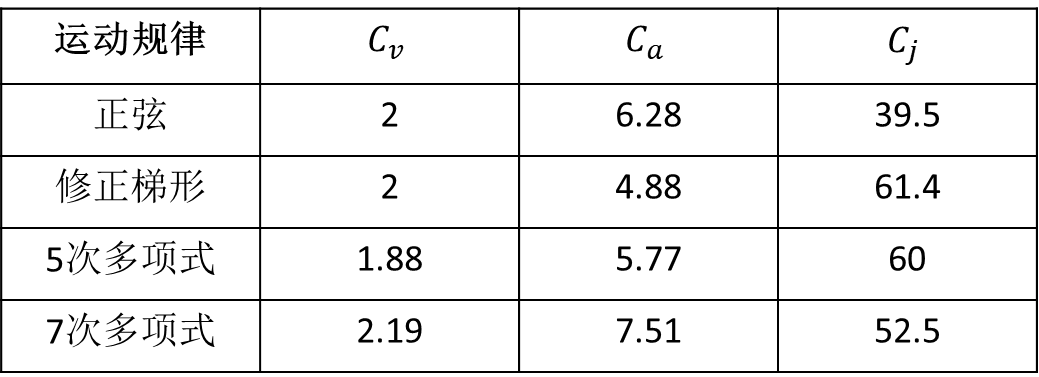
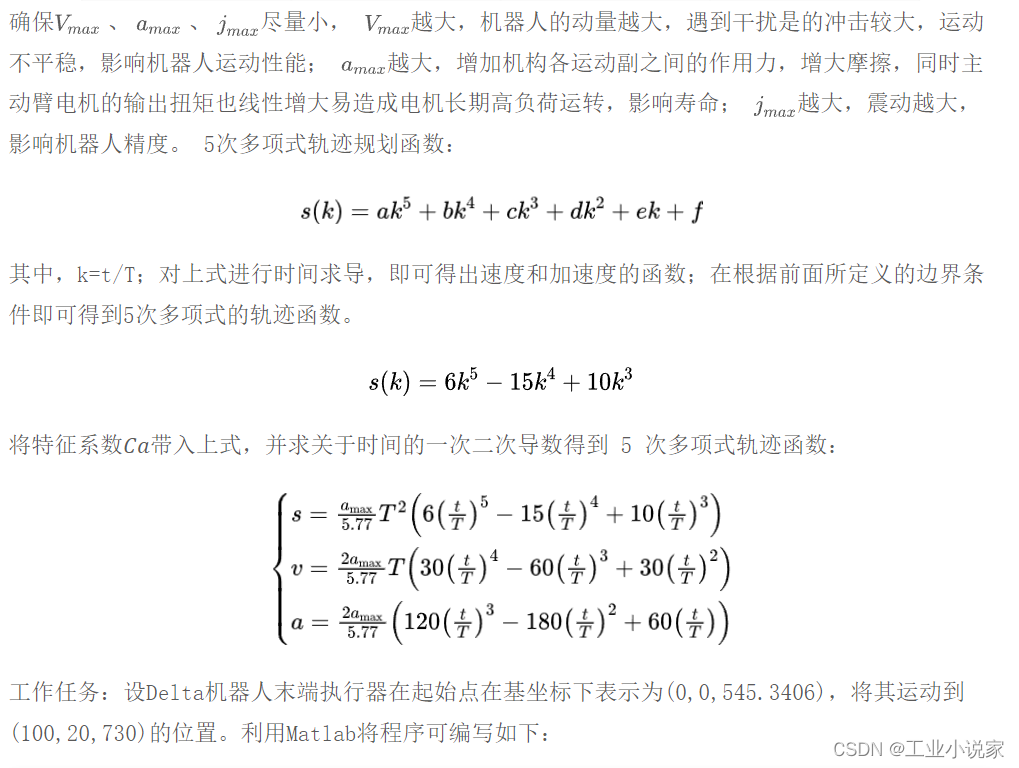
其中T为完成单周期任务的时间,S为完成单周期(角)位移,满足此函数要求的运动规律有很多。 速度的最大值𝑉_𝑚𝑎𝑥 、加速度的最大值𝑎_𝑚𝑎𝑥以及跃度最大值𝑗_𝑚𝑎𝑥,其表达式为:


clear all
clc
ti=0:0.01:5;
T=5;
th=sA(0.100,0.02,0.730)
amax1=5.77*th(1,1)*pi/(180*T^2);
amax2=5.77*th(1,2)*pi/(180*T^2);
amax3=5.77*th(1,3)*pi/(180*T^2);
skd1j=[];
skdd1j=[];
skd2j=[];
skdd2j=[];
skd3j=[];
skdd3j=[];
for i=1:size(ti,2)
t=ti(1,i)
sk1=(amax1*(T^2)/5.77)*(6*(t/T)^5-15*(t/T)^4+10*(t/T)^3);
skd1=(2*amax1*T/5.77)*(30*(t/T)^4-60*(t/T)^3+30*(t/T)^2);
skdd1=(amax1/5.77)*(120*(t/T)^3-180*(t/T)^2+60*(t/T));
sk2=(amax2*(T^2)/5.77)*(6*(t/T)^5-15*(t/T)^4+10*(t/T)^3);
skd2=(2*amax2*T/5.77)*(30*(t/T)^4-60*(t/T)^3+30*(t/T)^2);
skdd2=(amax2/5.77)*(120*(t/T)^3-180*(t/T)^2+60*(t/T));
sk3=(amax3*(T^2)/5.77)*(6*(t/T)^5-15*(t/T)^4+10*(t/T)^3);
skd3=(2*amax3*T/5.77)*(30*(t/T)^4-60*(t/T)^3+30*(t/T)^2);
skdd3=(amax3/5.77)*(120*(t/T)^3-180*(t/T)^2+60*(t/T));
skd1j=[skd1j skd1];
skdd1j=[skdd1j abs(skdd1)];
skd2j=[skd2j skd2];
skdd2j=[skdd2j abs(skdd2)];
skd3j=[skd3j skd3];
skdd3j=[skdd3j abs(skdd3)];
end
figure(1);
plot(ti,-skd1j);
hold on
plot(ti,-skd2j);
hold on
plot(ti,-skd3j);
title('速度曲线');
legend('theta1d','theta2d','theta3d');
figure(2);
plot(ti,skdd1j);
hold on
plot(ti,skdd2j);
hold on
plot(ti,skdd3j);
title('加速度曲线');
legend('theta1dd','theta2dd','theta3dd');
% sA(0,0,0.5453210063806)
% sk=6*(t/5)^5-15*(t/5)^4+10*(t/5)^3;
往期推荐