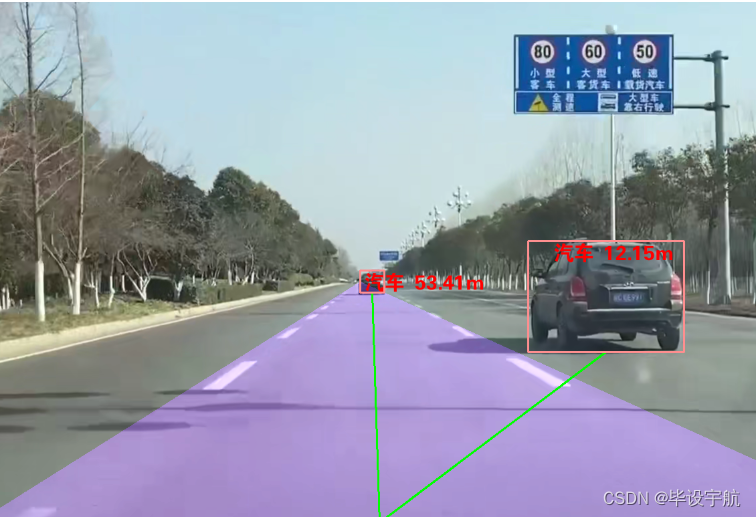
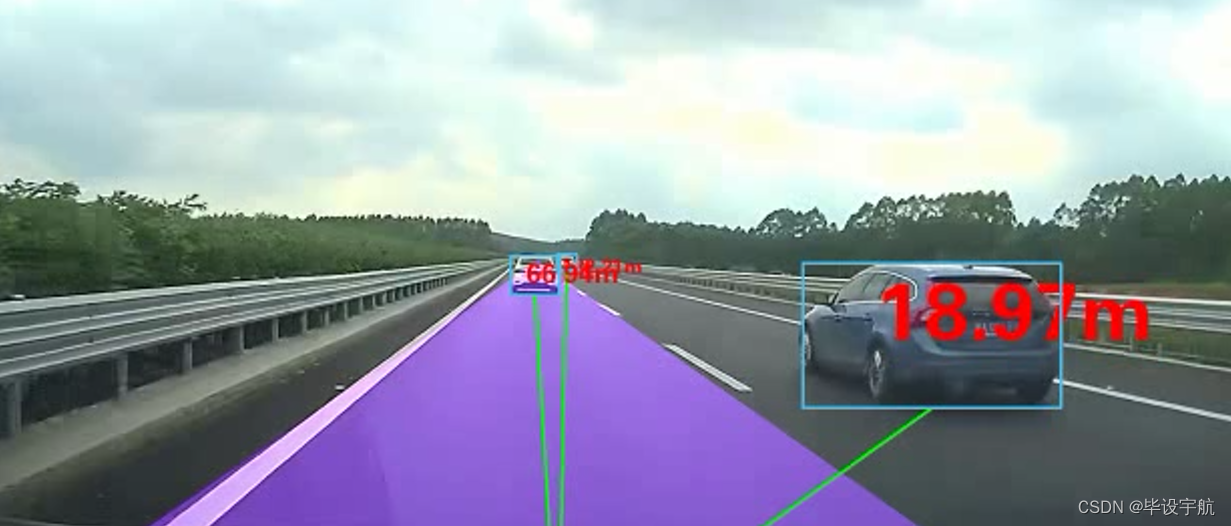
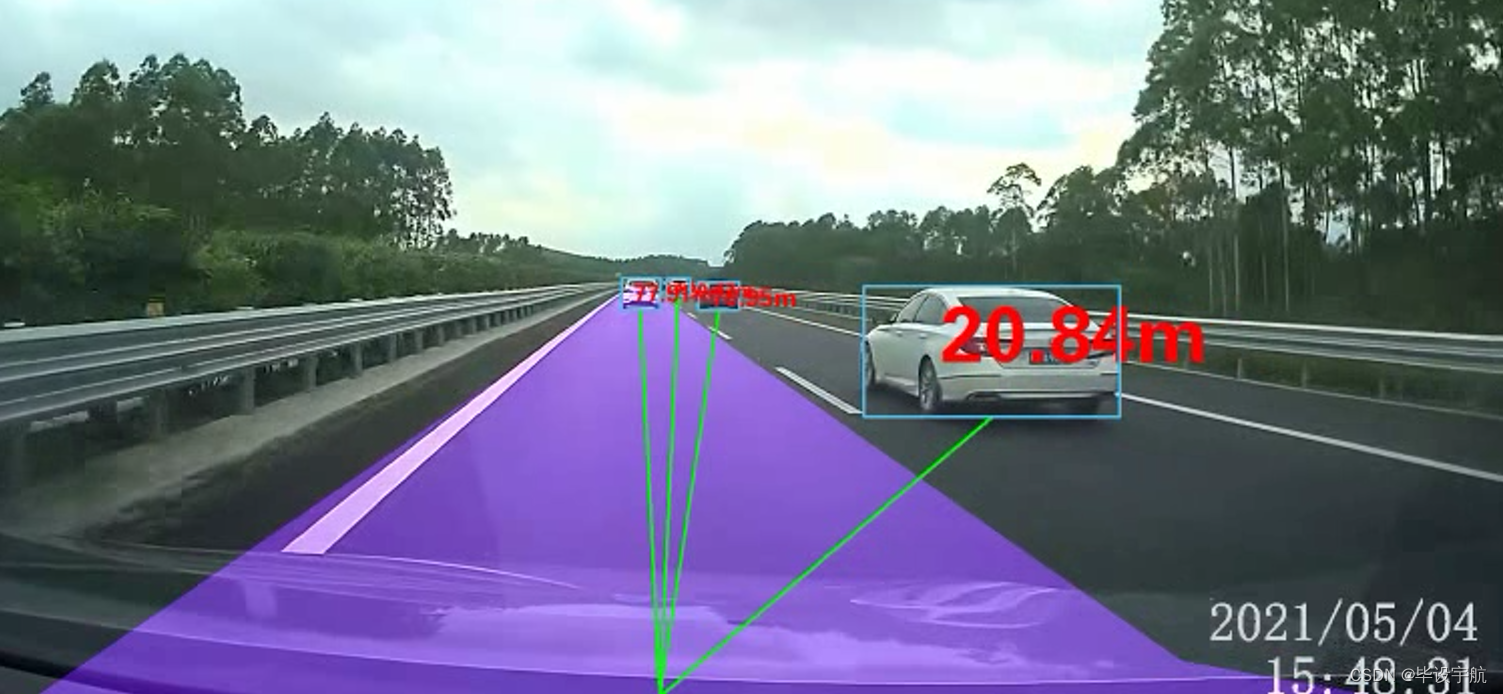
单目行车测距摄像系统是一种利用单个摄像头实现车辆行驶中前方障碍物距离测量的技术。该系统通过计算机视觉算法,能够实时分析摄像头捕捉的图像,精确计算出车辆与前方物体之间的距离,对于自动驾驶、高级驾驶辅助系统(ADAS)和智能交通系统至关重要。
技术原理:
- 图像处理:系统首先对摄像头捕获的图像进行预处理,包括色彩空间转换、噪声去除、边缘检测等,以提高后续算法的准确性和效率。
- 目标检测:运用目标检测算法(如YOLO、SSD或Faster R-CNN等),识别图像中的车辆、行人或其他障碍物。
- 深度估计:通过单目测距技术,如基于特征匹配的立体视觉、结构光、或深度学习方法,估算目标物体的深度信息。这一步骤可能涉及到相机标定,以获取相机的内外参数。
- 距离计算:结合目标检测结果和深度信息,计算出每个目标与摄像机之间的距离。
- 实时反馈:系统将距离信息实时反馈给驾驶员或自动驾驶控制系统,以帮助做出安全决策,如紧急制动、避障等。
项目流程:
- 数据收集与标注:采集大量带标注的真实世界图像,用于训练深度学习模型。
- 模型训练:使用深度学习框架(如TensorFlow或PyTorch)训练目标检测和深度估计模型。
- 系统集成:将训练好的模型集成到行车测距系统中,进行实时图像处理和距离计算。
- 性能测试:在模拟和真实环境中测试系统的准确性和稳定性,包括不同的光照条件、天气状况和复杂的交通场景。
- 优化与迭代:根据测试结果,不断优化算法和模型,提高测距精度和系统性能。
项目应用:
- 自动驾驶车辆:为自动驾驶车辆提供实时的环境感知能力,帮助车辆做出准确的驾驶决策。
- 高级驾驶辅助系统(ADAS):增强驾驶员的驾驶体验,如前向碰撞预警、自动紧急制动等。
- 智能交通系统:为交通管理部门提供实时路况信息,优化交通流量,减少事故。
项目优势:
- 成本效益:相较于双目视觉或LiDAR,单目摄像头成本更低,便于大规模部署。
- 实时性:系统能够实时处理图像,满足高速行驶中快速反应的需求。
- 多功能性:除了测距,系统还能进行目标分类和跟踪,提供全面的道路环境感知。
总之,单目行车测距摄像系统是现代智能交通和自动驾驶技术的重要组成部分,它利用先进的计算机视觉和深度学习技术,为安全驾驶和智能交通管理提供了强有力的支持。
主程序界面
#-*- coding: utf-8 -*-
import tkinter as tk
from init_window import Tkwindow
from init_model import init_model
if __name__ == "__main__":
window = tk.Tk()
window.title('单目行车测距与多功能摄像头 v0.9 ')
window.geometry('1000x480')
window.resizable(0, 0) # 防止用户调整尺寸
app_window = Tkwindow(window)
app_window()
window.mainloop()