背景
根据其构件的连接是否构成闭环形式,机器人可分为串联机器人和并联机器人两种。对于串联机器人,其所有的构件以串联的结构形式连接起来,在空间组成一种开环结构,因而具有工作空间大,灵活性好等优点,但同时由于开环结构会造成累积误差以及系统刚度较小等缺点,常被应用在大范围运动并且承载较低、对精度要求不是特别高的场合,如车间物品运输、汽车生产线、粗加工领域等。
概念
并联机器人:指具有并联结构的闭环机器人,其机械结构实质是并联机构,通常由动平台(也称为末端执行器)、静平台及连接动静平台的两条或两条以上的支链构成,是一种闭环机构。
优点: 相比于串联机器人,并联机器人具有如下优点:
- 1、通常为对称结构,重复构件及重复运动副多,可批量制造;结构简单。
- 2、动平台与静平台之间通过多条支链连接,刚度大并且承载能力强;
- 3、并联式机器人每条支链上的构件通常较少,主动副一般在不同的支链上,累积误差小,并且不同支链上的误差会部分抵消,精度高;
- 4、每条支链上的主动副一般都安装在静平台上或靠近静平台,运动部件惯性小,系统的动态特性好,末端执行器响应速度快。
缺点: 并联机器人的上述特点决定了其与串联机器人在性能上存在着互补的关系。串联机器人出现较早,其研究及应用已趋于成熟,但并联机器人仍处于发展阶段,其在应用中仍存在一定的问题。其中,工作空间较小、工作空间内奇异性复杂、组装过程较为困难的特性是并联机器人最大的缺点。
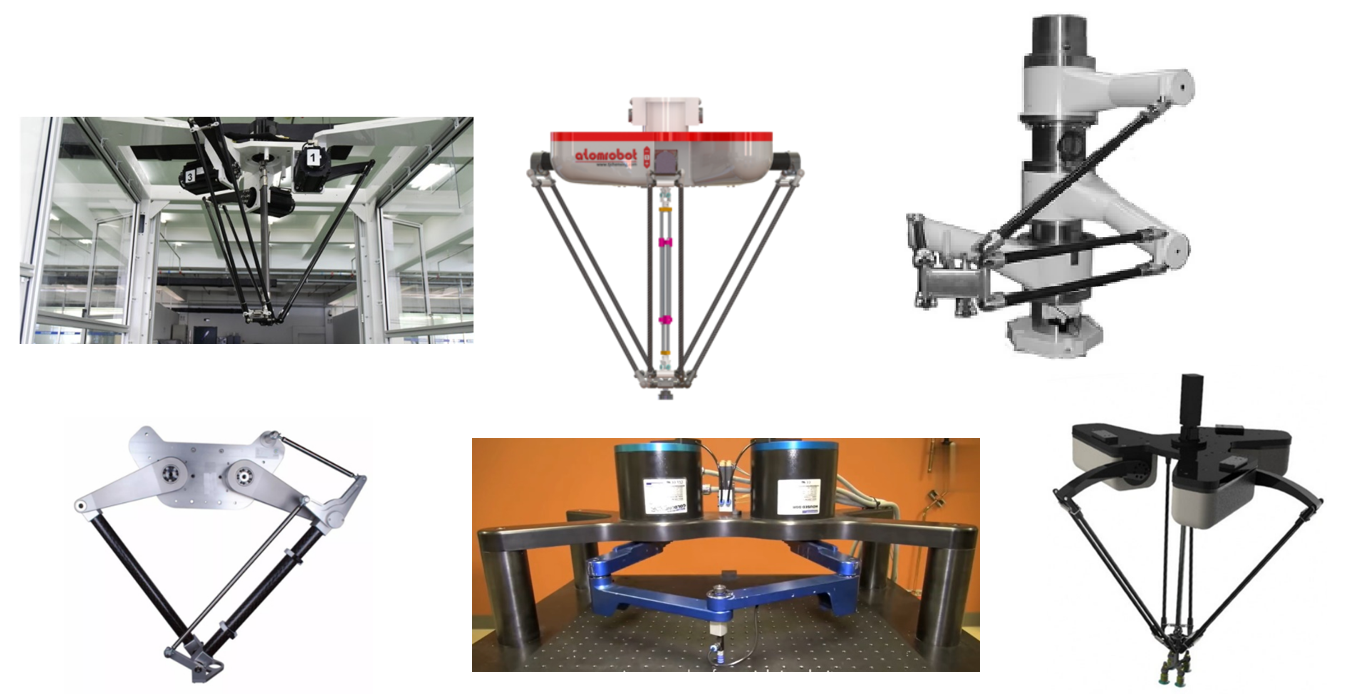
常见的并联机器人
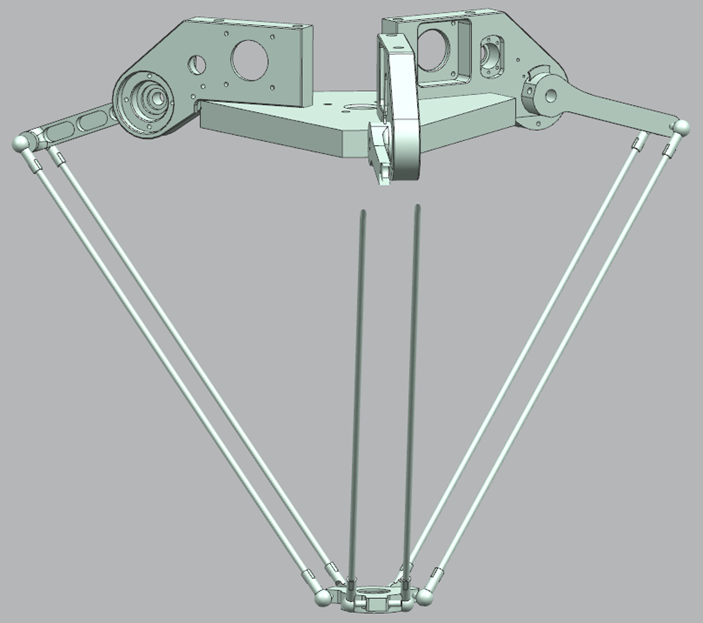
Delta机器人
该机器人是一种由三条臂组成的并联机器人,其中三条臂连接在基座上的运动副上。在设计上的关键特点是每条臂采用平行四边形结构,能够保持末端执行器的姿态。由于Delta机器人的速度非常快,一些拾取动作可以高达每分钟200次,因此在需要拾取和包装的工厂广泛使用。
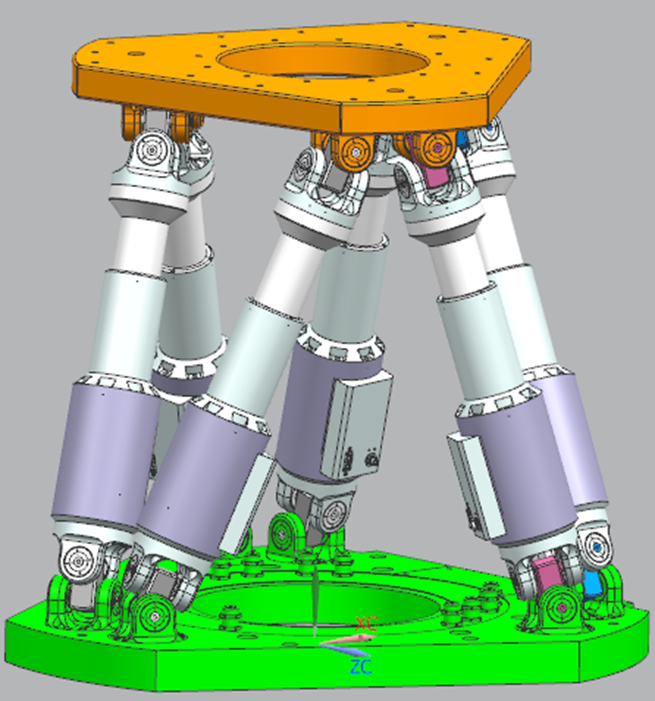
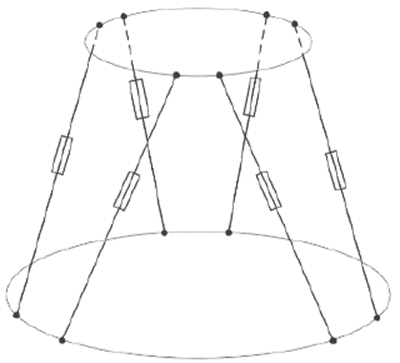
Stewart机器人
通常称之为Stewart平台,最初是由V.E.Gough发明的,其发明思路借鉴于一种六支撑臂八面体设备的设计,用于确定组合载荷下轮胎的性能。主要有一个固定平台和一个移动平台以及六个可伸缩的推杆组成,通常情况下,固定平台与底座连接,移动平台在空间具有六个自由度,通过六个推杆的伸长或缩短可控制移动平台的位置和角度。
并联机器人发展现状
起源: 人类对并联机器人的研究始于1895年,一种“用关节连接的八面体”被数学家 Cauchy 研究,德国人斯提瓦特在一九六五年最早发明了并联机构——六自由度并联机构,从那以后,大家都叫做斯提瓦特平台,1962年,Gough提出了一种六自由度并联机器人,并将其用于轮胎检测。在1979年,为研究装配用的机床,Mac.Callion 和 Pham 在斯提瓦特平台的基础上,采用并联机构,设计出了一种全新概念的机床,标志着在制造业机床领域并联机器人技术研究应用的开始。
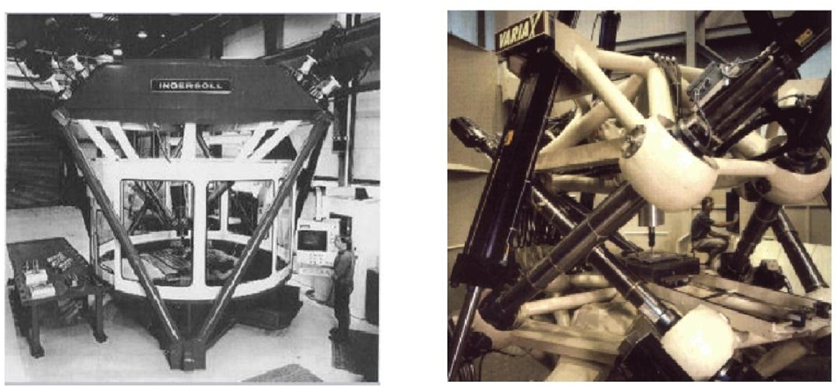
国外发展: 在制造装配设备领域,欧美日国家对机器人在机床设备的应用研究非常重视,自并联机器人诞生以来,投入了大量的人力、物力在该方面开展了大量的技术研究,经过上百年技术积累和沉淀,开发制造出并联机床,并形成了各种类型的模型或实物设备,其中最具有代表意义是并联数控“六足虫”机床,和并联数控“变异型”机床,他们于1994年在机床展上以成品的形式被展出。
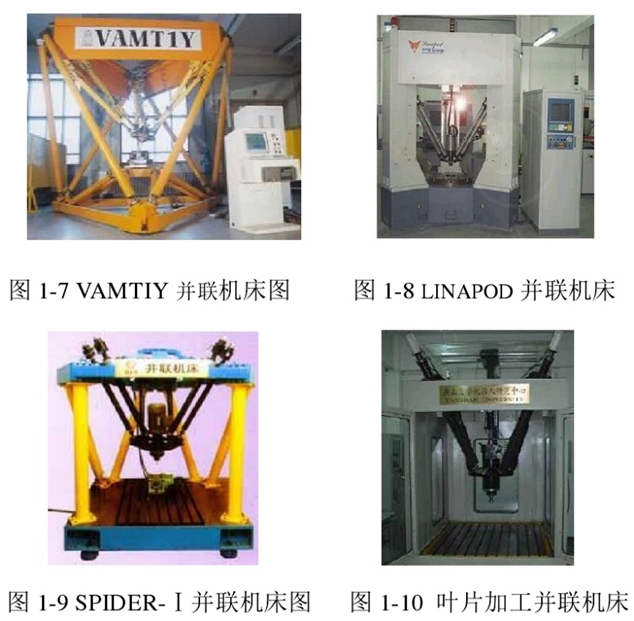
国内发展: 在并联机器人研究方面,国内起步较晚,在1991年,国内第一台六自由度并联机构由黄真教授研究和制造成功。1997年,VAMTIY 并联机床在国内出现,该机器人机构样品由天津大学和清华大学合作开发,从此以后,国内又陆续自主成功研制了多台并联机床,1999年,一种三坐标并联设备由天津第一机床总厂研制成功,名字叫做 LINAPOD ;一种六自由度并联设备由哈尔滨工业大学研制成功;一种五自由度并联设备由燕山大学研制成功,名字叫做 SPIDER-Ⅰ;2001年,一种用于水轮机叶片制造的并联机床由哈工大学与一家刀具公司合作研制成功,精度能达到 2 丝。
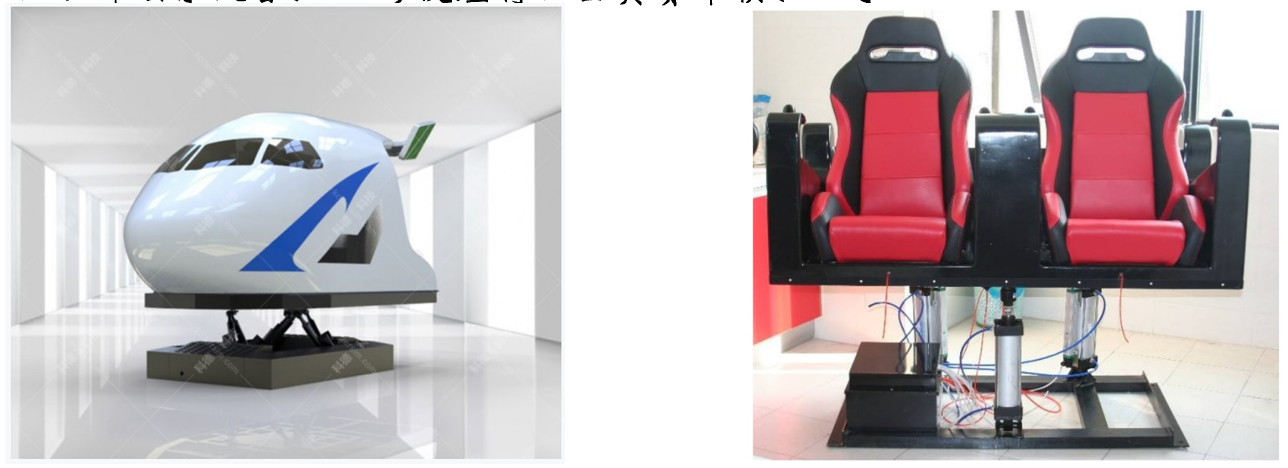
应用场合:
1、运动模拟器:主要用于模巧各种运动,帮助人们更好地适应或研究各种特殊环境,如训练飞行员的飞行模拟器、研究汽车运行状态的汽车模拟系统等。
2、并联机床:与传统的串联机床相比,并联机床更容易实现多轴联动,
3、各种娱乐设备:4D影院座椅、全真赛车模拟器等。
往期推荐