1.介绍
旋转变压器是一种精密的位置、速度检测装置,尤其适用于高温、严寒、潮湿、高速、振动等环境恶劣、旋转编码器无法正常工作的场合。旋转变压器在使用时并不能直接提供角度或位置信息,需要特殊的激励信号和解调、计算措施,才能将旋转变压器信号中包含的位置信息得到。
2.旋转变压器
旋转变压器按照极数、工作方式可分为多种,目前应用最为广泛的是单输入、双输出的无刷旋转变压器。它包含三个绕组,即一个转子绕组和两个定子绕组,两个定子绕组互为90°分布。如下图所示:
2.1旋转变压器工作原理
其工作原理是,将高频的正弦载波通过耦合施加在转子绕组上,并耦合至次级定子绕组。便可得到与转子位置相关的,对幅值进行调制的定子绕组输出信号和,如下式:

两个定子绕组的调制输出信号相位差90度。通过解调将高频的载波信号去除后,可以获得Vsin 和Vcos信号,如下所示:

由此可看出,在获取旋转变压器位置信息的过程中需要三个要素:
1、载波生成,产生高频的激励载波;
2、高频采样,对返回的带有高频载波信号进行采样;
解耦计算,通过解耦去除高频载波信号,进而计算得到位置。
3. 旋转变压器软件解码算法Matlab simulink仿真模型

3.1 高频载波频率为10khz,次级定子绕组调制波为50hz,系统采样频率为10Mhz,载波的幅值为1,比例系数K = 1,带有高频载波sin、cos正余弦包络信号如下:

Cos信号如下:

3.2 对载波信号整形,则在sin/cos调制波为正时,将高频载波信号的负半周翻转为正,类似于电压整流,反之在sin/cos调制波为负时,将高频载波信号的正半周翻转为负。整形后的sin、cos波如下:
整形后sin波形如下:

整形后的cos波形如下:

高频载波符号信号sign如下,当载波大于0时,输出1,当载波小于0时,输出-1:

3.3 积分,对载波周期内信号进行积分,推导如下:

经过积分环节后,便可将高频的载波信号去除,仿真模型K为1,V也为1,故可得积分输出后sin、cos信号幅值为4。黄色线为sin,蓝色为cos,仿真波形与理论推导一致:

3.4 4、角度计算仿真:

理论角度与旋转变压器解码输出角度波形如下(黄色为旋转变压器解码角度,蓝色为理论角度):
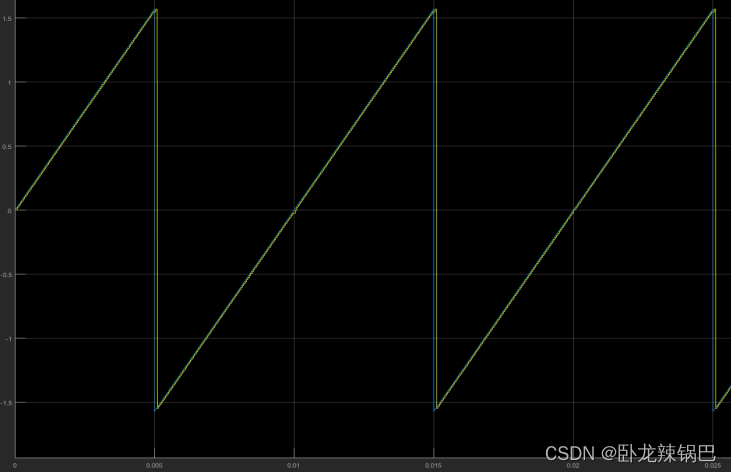
由上图可得旋转变压器解码输出角度相比理论角度有一定延迟,故在实际芯片中系统时钟要尽可能高,高频载波频率为10khz,则ADC的采样频率至少为10Mhz。
simulink仿真链接如下(大家感兴趣可去下载):
https://upload.csdn.net/creation/uploadResources?spm=1011.2124.3001.5547