引言
永磁同步电机(PMSM)因其结构简单、功率密度高、转矩惯量比大和效率高等优点,在工业生产、航空航天和新能源交通等领域得到了广泛应用。然而,传统的参数辨识方法依赖位置传感器,这不仅增加了硬件成本,还容易受到干扰。为此,本文提出了一种基于V/f控制系统的无位置传感器离线参数辨识方法。
背景技术
在无位置传感器控制的PMSM系统中,电机控制性能和转子位置的观测都依赖于电机模型参数的准确性。因此,离线参数辨识在这种控制方法中尤为重要。现有的离线参数辨识方法主要包括有限元法和实验检验法,前者计算量大且耗时长,而后者虽然测量精度较高,但容易受到死区效应的影响。
方法
本文提出的方法包括以下步骤:
- 建立V/f控制系统:利用V/f控制系统控制永磁同步电机旋转,采集定子电流并进行Clark变换和Park变换。
- 转子预定位及PWM设置:通过六步定位法对转子进行预定位,并设置PWM开关模式。
- 相电阻计算:根据反馈电流调整占空比,记录不同占空比对应的反馈电流稳定值,计算电机的相电阻。
- 相电感计算:计算固定占空比下的实际作用电压和相电感。
- 磁链计算:在电机空载时,逐步增加电压和频率,直到电机的转子转速达到磁链辨识的转速,计算电机的磁链。
具体步骤描述
建立V/f控制系统
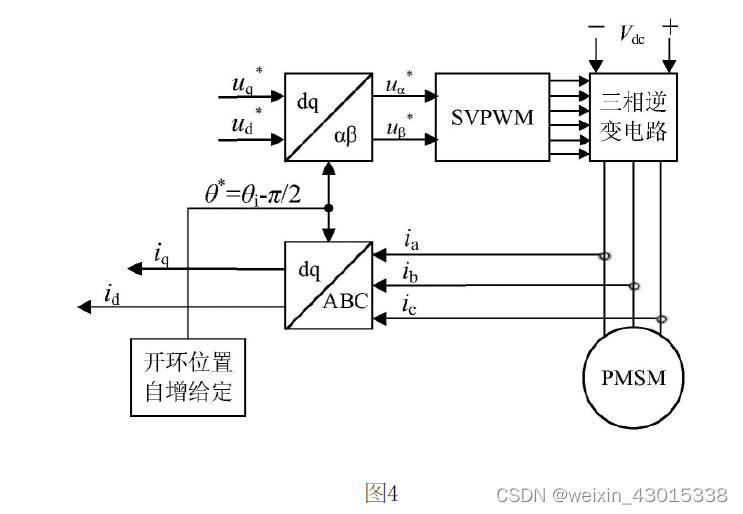
利用V/f控制系统控制永磁同步电机旋转的步骤包括采集定子电流并进行Clark变换和Park变换。具体实现方法如下:
- 采集A相、B相和C相定子电流iA、iB和iC,并进行Clark变换,得到α轴电流iα和β轴电流iβ。
- 对α轴电流iα和β轴电流iβ进行Park变换,得到dq旋转坐标轴系下的d轴电流id和q轴电流iq。
- 给定d轴电压Ud=0,q轴电压Uq=Uqref。
- 对d轴电压Ud和q轴电压Uq进行反Park变换,得到静止两相坐标下的α轴电压uα和β轴电压uβ。
- 将α轴电压uα和β轴电压uβ输入到SVPWM模块,得到UVW三相桥臂的占空比,进而控制永磁同步电机的旋转。
转子预定位及PWM设置
在进行电阻辨识之前,需要对转子进行预定位,以避免电机在辨识过程中旋转,影响辨识精度。本文采用六步定位法实现转子的预定位:
- 按电机旋转方向依次定时产生六个预设幅值的基本电压矢量,使最后一个基本电压矢量对应的角度为-30度方向。
- 设置PWM开关模式为定子三相绕组选通AB两相,C相悬空。具体配置为C相上下桥臂均不导通,B相上桥臂强制不导通,下桥臂强制导通,A相上桥臂由比较逻辑驱动,下桥臂强制不导通。
相电阻计算
相电阻的辨识过程包括以下步骤:
- 初始化设置PWM的比较值为零,电流滤波器清零,并设置PWM比较值的最大值以及电阻估算时间的最大值。
- 逐步增加PWM的比较值,采样A相电流iA和B相电流iB,计算反馈电流iRF=(iA-iB)/2,并通过电流滤波器滤除高频谐波,得到电流iR。
- 若电流iR未达到电机额定电流的10%,则继续增加PWM的比较值,直至电流iR达到电机额定电流的10%,维持此时的PWM占空比一段时间,直到电流稳定,采样16个周期的电流值isum1,并记录此时的PWM占空比D1。
- 在上述基础上再逐步增加PWM的比较值,重复上述过程,记录电流值isum2和对应的PWM占空比D2。
- 若PWM比较值达到最大值但电流仍未达到设定值,或电阻辨识时间过长,则恢复PWM比较值为零,关闭PWM,并置位辨识错误标志位。
- 根据记录的电流值isum1和isum2、PWM占空比D1和D2,利用差值欧姆定律计算相电阻。
相电感计算
相电感的计算过程如下:
- 设置PWM的比较值为零,计数器清零,等待反馈电流稳定为零。
- 给定PWM的占空比为D2,实时读取反馈电流,计数器开始计时,直至反馈电流达到isum2的0.632倍时,停止计时。
- 根据记录的计时值和相电阻,计算电机的相电感。
![]()
![]()
磁链计算
在电机空载时,采用V/f控制系统逐步增加电压和频率,将电机的转子转速提高到磁链辨识的转速,具体步骤如下:
- 将PWM改为逻辑驱动模式,通过修改PWM比较值控制每个桥臂的占空比,产生不同的电压矢量。
- 给定d轴电压Ud=0,q轴电压Uq=Uqref,在转速提升过程中,逐渐增加Uqref,直到电机转速达到磁链辨识转速。
- 建立电机开环情况下的dq电压方程,结合Ud=0和Uq=Uqref,计算电机的磁链ψf。
实验结果
通过实验验证,本文提出的方法能够在无位置传感器的情况下准确辨识PMSM的参数。具体实验结果如下:
- 电阻和电感辨识过程中,预定位的方法有效避免了驱动器死区对辨识精度的影响,显著提高了参数辨识的准确性。
- 磁链辨识过程中采用开环V/f控制,利用含功率角的电压方程,成功求解电机磁链。
结论
本文提出的离线参数辨识方法在无位置传感器控制的永磁同步电机系统中具有广泛的应用前景。该方法不仅提高了参数辨识的精度,还简化了系统硬件配置,降低了成本,为PMSM的高效运行提供了有力支持。
附录
图表
- 图1:六步预定位过程示意图

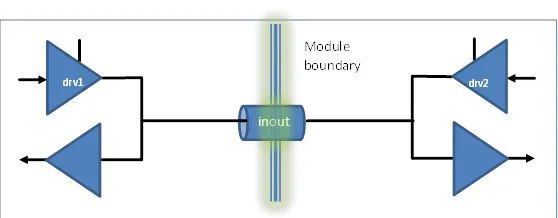
- 图2:电阻电感辨识拓扑示意图

- 图3:电阻辨识中电流示意图
- 图4:V/f控制系统示意图