OpenCV 张正友标定法(二)
news2026/2/14 13:03:11


本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1882029.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

007-GeoGebra基础篇-构建等边三角形
今天继续来一篇尺规作图,可以跟着操作一波,刚开始我写的比较细一点,每步都有截图,后续内容逐渐复杂后我就只放置算式咯。 目录 一、先看看一下最终效果二、本次涉及的内容三、开始尺规画图1. 绘制定点A和B2. 绘制线段AB3. 以点A为…

基于STM32的智能电池管理系统
目录
引言环境准备智能电池管理系统基础代码实现:实现智能电池管理系统 4.1 数据采集模块4.2 数据处理与分析4.3 控制系统实现4.4 用户界面与数据可视化应用场景:电池管理与优化问题解决方案与优化收尾与总结
1. 引言
智能电池管理系统(Ba…
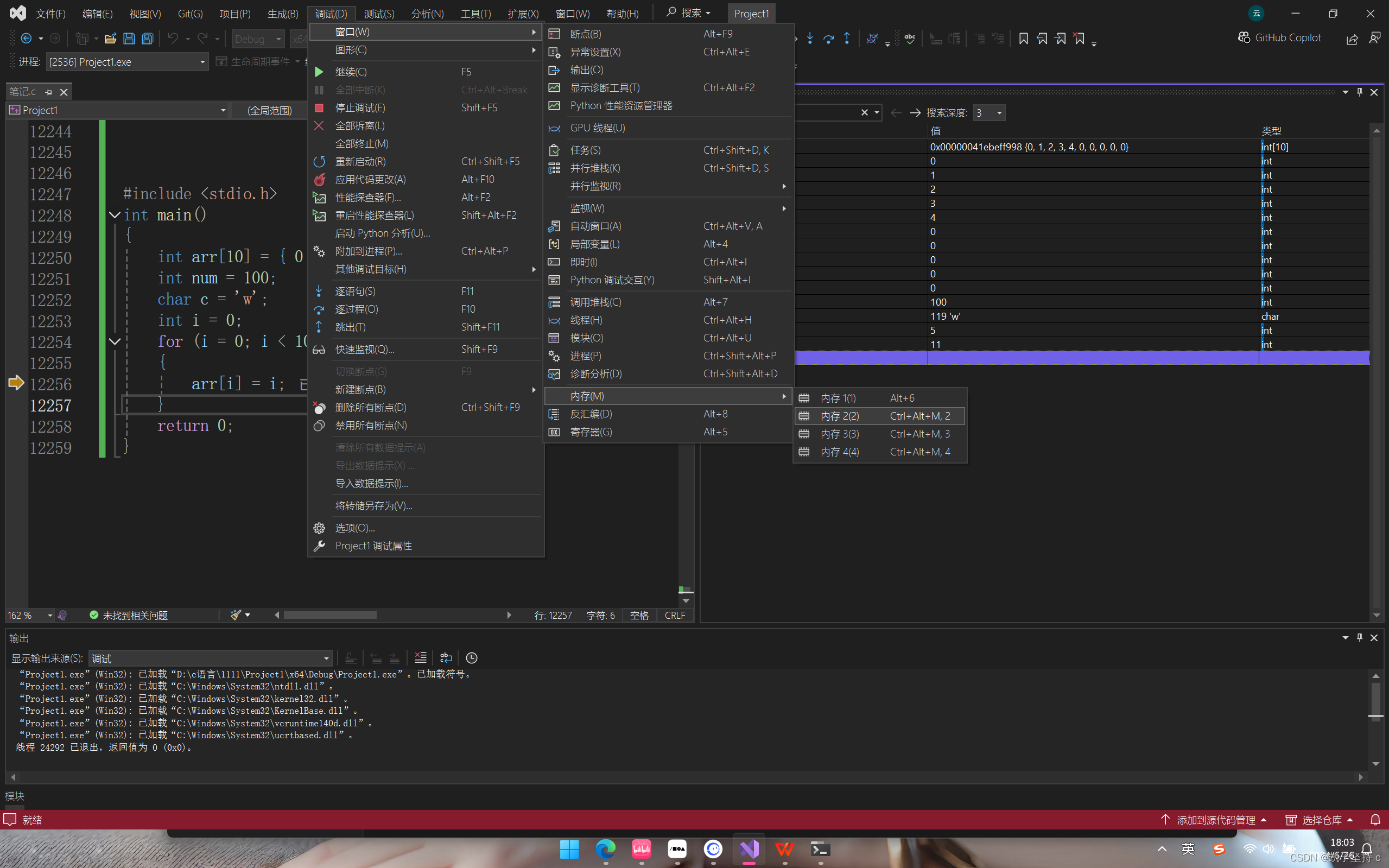
C语言--vs使用调试技巧
1.什么是bug?
1.产品说明书中规定要做的事情,而软件没有实现。
2.产品说明书中规定不要做的事情,而软件确实现了。
3.产品说明书中没有提到过的事情,而软件确实现了。
4.产品说明书中没有提到但是必须要做的事情,软件确没有实…

预付式消费,今起实行!
近年来,随着我国经济社会快速发展,消费新业态、新模式不断涌现,消费者权益保护也面临新情况、新问题。
大数据杀熟、自动续费难取消、网络直播带货“以假充真”“以次充好”、预付式消费商家跑路……数据显示,2023年,…
Vue 常见面试题及答案
本人详解 作者:王文峰,参加过 CSDN 2020年度博客之星,《Java王大师王天师》 公众号:JAVA开发王大师,专注于天道酬勤的 Java 开发问题中国国学、传统文化和代码爱好者的程序人生,期待你的关注和支持!本人外号:神秘小峯 山峯 转载说明:务必注明来源(注明:作者:王文峰…
vscode的一些使用问题
vscode使用技巧 1、快捷键(1)打开命令面板(2)注释(3)删除行(4)上下移动光标(5)光标回退(6)复制行(7)插入空白行…
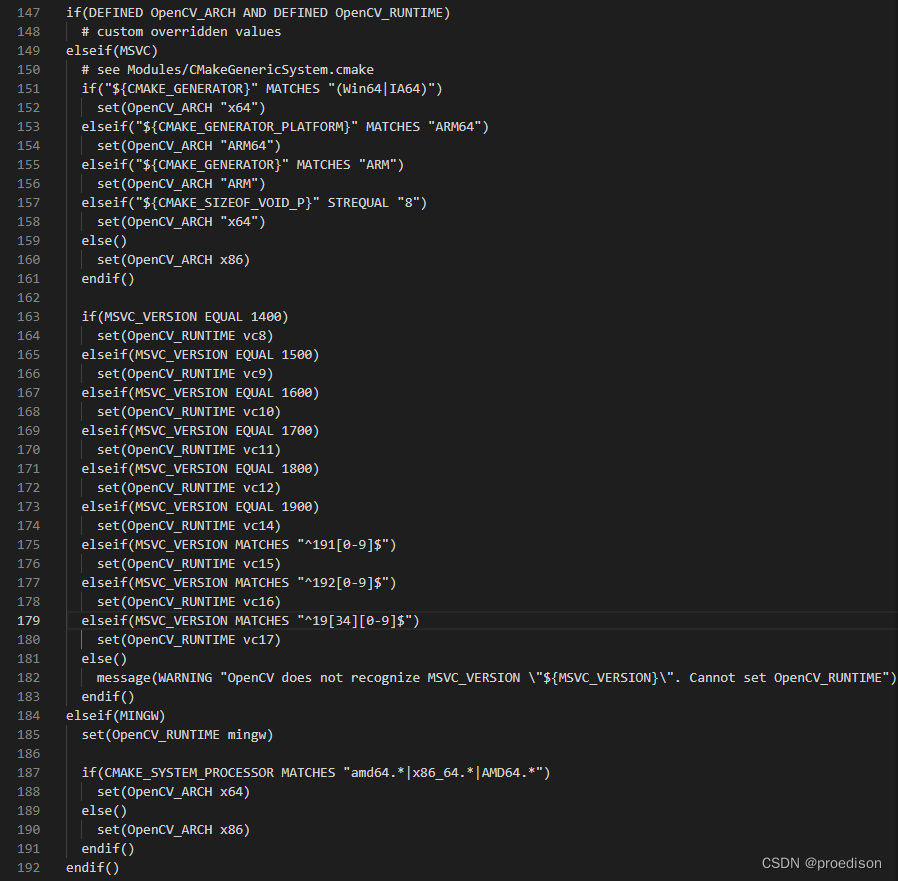
opencv编译报错OpenCV does not recognize MSVC_VERSION “1940“
具体如下:
CMake Warning at cmake/OpenCVDetectCXXCompiler.cmake:182 (message):OpenCV does not recognize MSVC_VERSION "1940". Cannot set OpenCV_RUNTIME
Call Stack (most recent call first):CMakeLists.txt:174 (include)
打开源码\opencv\sources\cmak…
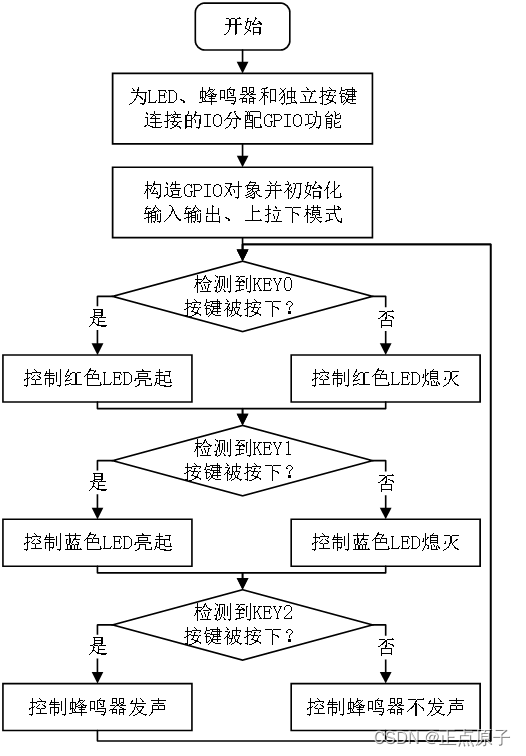
【正点原子K210连载】第十四章 按键输入实验 摘自【正点原子】DNK210使用指南-CanMV版指南
1)实验平台:正点原子ATK-DNK210开发板 2)平台购买地址https://detail.tmall.com/item.htm?id731866264428 3)全套实验源码手册视频下载地址: http://www.openedv.com/docs/boards/xiaoxitongban
第十四章 按键输入实…

FPGA - 图像灰度化
一,灰度图像概念 灰度数字图像是每个像素只有一个采样颜色的图像。这类图像通常显示为从最暗黑色到最亮的白色的灰度,尽管理论上这个采样可以任何颜色的不同深浅,甚至可以是不同亮度上的不同颜色。灰度图像与黑白图像不同,在计算机…

50+k8s常用命令,助你成为k8s大牛!
Kubernetes是一个强大的容器编排平台,不管是运维、开发还是测试或多或少都会接触到,熟练的掌握k8s可大大提高工作效率和强化自身技能。
集群管理
1. 查看集群节点状态:
kubectl get nodes2. 查看集群资源使用情况:
kubectl top nodes3. 查看集群信息…
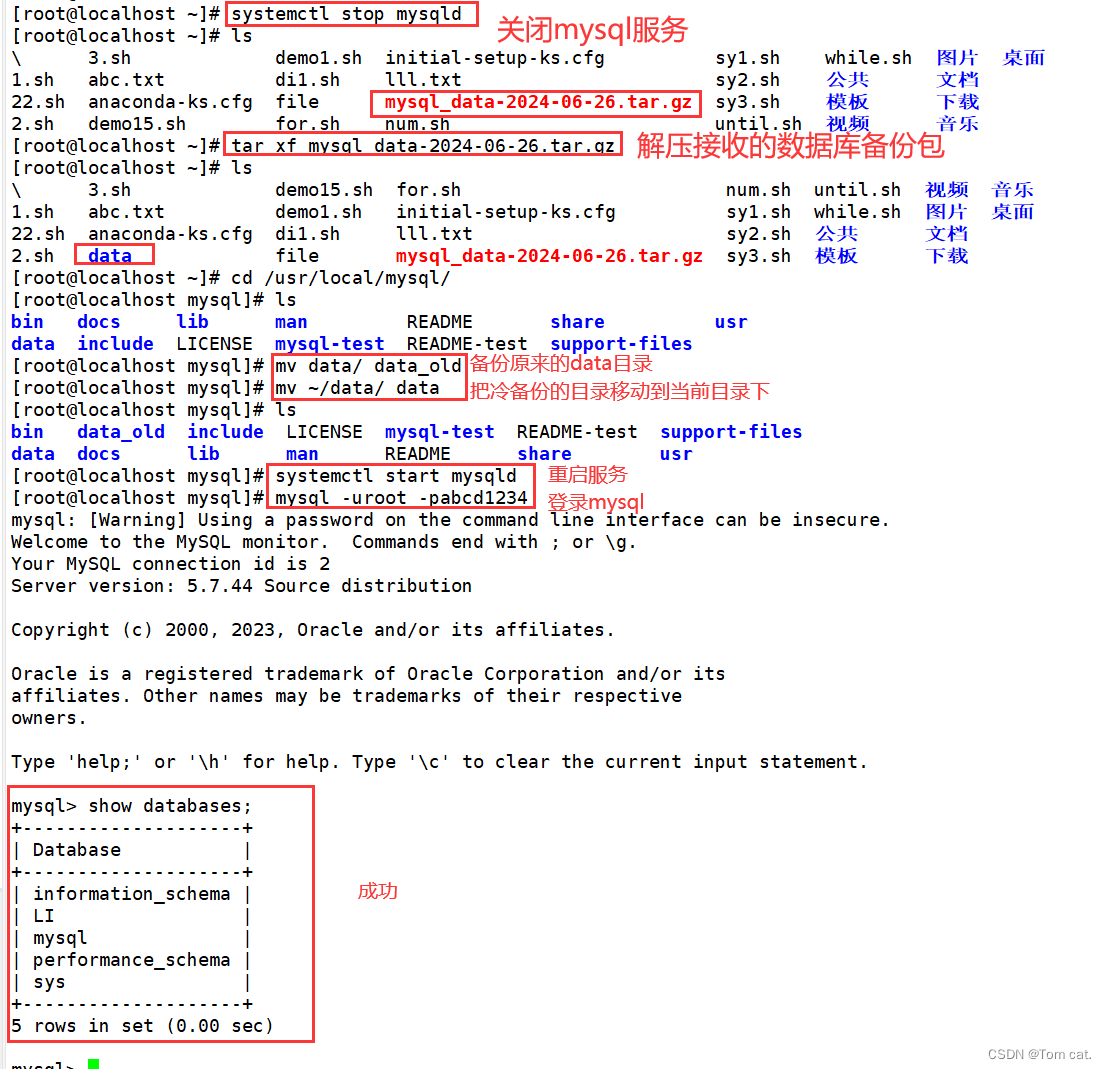
【MySQL】数据库——备份与恢复,日志管理1
一、数据备份的重要性
1.备份的主要目的是灾难恢复 在生产环境中,数据的安全性至关重要 任何数据的丢失都可能产生严重的后果造成数据丢失的原因:
程序错误人为,操作错误运算错误磁盘故障灾难(如火灾、地震)和盗窃
2.数据库备份…
IPFS 的开发对接流程
IPFS 的对接流程通常包括以下几个步骤,请注意,IPFS 的对接流程可能因您的具体需求而异。建议您在进行任何操作之前仔细阅读相关文档。北京木奇移动技术有限公司,专业的软件外包开发公司,欢迎交流合作。 1. 安装 IPFS
下载并安装 …

Java外卖点餐连锁店餐饮生鲜奶茶外卖店内扫码点餐源码同城外卖校园外卖源码
外卖点餐连锁店餐饮生鲜奶茶外卖小程序:打造一站式便捷服务
🚀 引领外卖新潮流:小程序的力量
在数字化时代,外卖小程序已成为餐饮行业的新宠。它不仅提供了便捷的点餐服务,还融合了连锁店、餐饮生鲜、奶茶等多种业务…
![[Shell编程学习路线]——shell脚本中case语句多分支选择详解](https://img-blog.csdnimg.cn/direct/be4467ce207541fdb175c897344aeb68.png)
[Shell编程学习路线]——shell脚本中case语句多分支选择详解
🏡作者主页:点击!
🛠️Shell编程专栏:点击!
⏰️创作时间:2024年6月21日16点30分
🀄️文章质量:95分 ————前言————
在Shell编程中,处理多种条件…
强度理论的相当应力在坐标图里的表示
以下的图均只考虑二维,且没有切应力,有切应力的情况可以转换成只有两个正应力的情况,另外,这里画出的图均认为相当应力就是许用应力
第一,二强度理论用于脆性材料 两种强度理论的图均明显有一个转角,这是因…
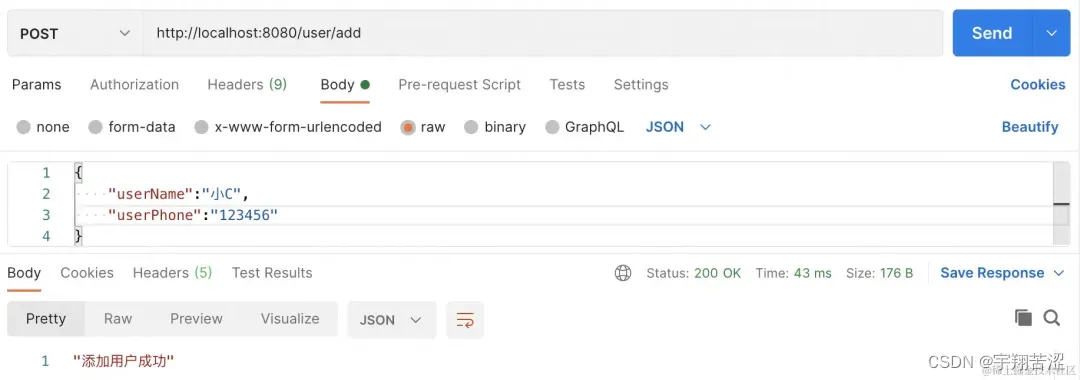
springboot接口防抖【防重复提交】
什么是防抖 所谓防抖,一是防用户手抖,二是防网络抖动。在Web系统中,表单提交是一个非常常见的功能,如果不加控制,容易因为用户的误操作或网络延迟导致同一请求被发送多次,进而生成重复的数据记录。要针对用…

Anaconda创建虚拟环境+Pycharm和Jupyter使用虚拟环境
文章目录 前言一、创建虚拟环境步骤1.查看已有虚拟环境2.创建虚拟环境3.激活虚拟环境4.查看已安装的库清单5.删除虚拟环境 二、pycharm导入虚拟环境三、jupyter导入虚拟环境1.激活虚拟环境2.导入内核3.打开jupyter4.选择虚拟环境5.查看内核列表6.删除内核 前言
提前下载好Anac…
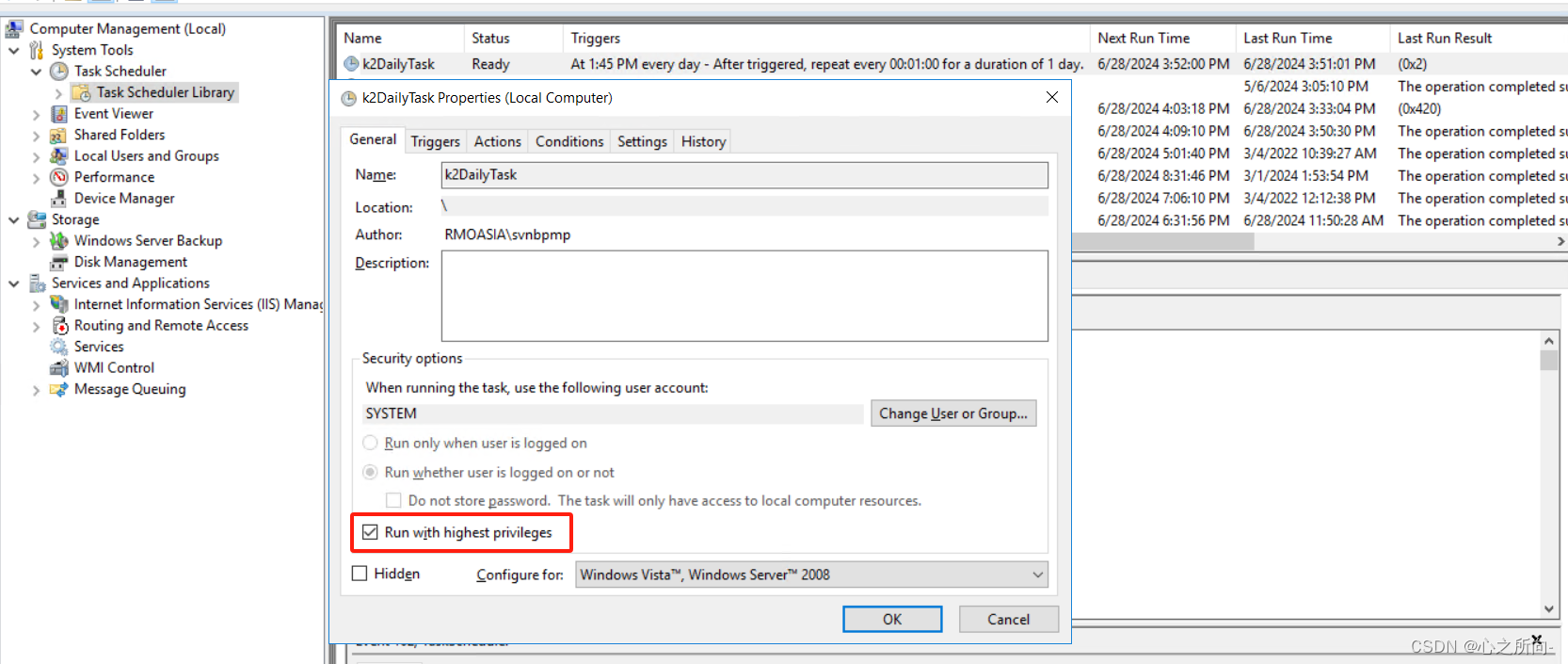
Windows定时任务执行脚本
场景:由于网络波动原因导致云数据库没连接上,从而导致某个流程引擎链接不上数据库从而导致该流程引擎服务挂了,网络恢复后 数据库链接正常,但是该引擎服务还是中止状态。
解决方案:在Windows中新建一个定时任务&#…

服务器raid5坏盘-换盘-修复阵列过程
目录 背景原因分析解决步骤名词解释进入raid管理界面换回旧4号,进行import再次更换4号盘 总结 背景
服务器除尘之后文件服务器部分文件不能访问了,部分文件夹内容为空,起初以为是新配置的权限的问题,排查之后发现不仅仅是权限问题 jumpserv…