0. 简介
束调整(Bundle Adjustment,BA)是指同时确定传感器姿态和场景几何的问题,这是机器人视觉中的一个基本问题。本文提出了一种高效且一致的激光雷达束调整方法。该方法利用边缘和平面特征来表示场景几何,并直接最小化每个原始点到相应几何特征的自然欧氏距离。这种表述的一个好处是几何特征可以通过解析方法求解,从而大大降低了数值优化的维度。为了更高效地表示和求解所得到的优化问题,《Efficient and Consistent Bundle Adjustment on Lidar Point Clouds》提出了一种新颖的概念——点簇,通过一组紧凑的参数(点簇坐标)来编码与同一特征相关联的所有原始点。我们基于点簇坐标推导了BA优化的闭式导数,包括一阶和二阶导数,并展示了它们的理论性质,如零空间和稀疏性。基于这些理论结果,本文开发了一种高效的二阶BA求解器。除了估计激光雷达姿态,该求解器还利用二阶信息估计由测量噪声引起的姿态不确定性,从而得到一致的激光雷达姿态估计。此外,由于使用了点簇,所开发的求解器在优化的所有步骤中都能避免枚举每个原始点(由于数量庞大,这是非常耗时的):成本评估、导数评估和不确定性评估。所提出的方法在模拟和实际环境中进行了广泛评估,包括一致性、准确性和计算效率。在涵盖各种数据集(Hilti、NTU-VIRAL和UrbanLoco)、环境(校园、城市街道、办公室、实验室和建筑工地)、激光雷达类型(Ouster OS0-64、Ouster OS1-16、Velodyne HDL 32E)和运动类型(手持、基于无人机和基于地面车辆)的19个真实开放序列上进行了基准评估,结果显示我们的方法在定位准确性、建图质量和计算效率方面始终明显优于其他最先进的方法。具体的代码已经在Github上开源了
1. 主要贡献
在这项工作中,我们提出了一个专门针对激光雷达点云的高效一致的BA(Bundle Adjustment)框架。该框架遵循我们之前的工作BALM [32],该工作基于激光雷达扫描中丰富的边缘和平面特征,对激光雷达BA问题进行了建模。BA的公式自然地最小化了每个点到相应边缘或平面的欧氏距离,决策变量包括激光雷达的位姿和特征(边缘和平面)参数。此外,我们证明了几何参数(即边缘和平面)可以通过解析方法求解,从而使优化问题仅依赖于激光雷达的位姿。由于几何特征的数量通常很大,从优化中消除这些几何特征将大大减少优化的维度(从而减少时间)。
我们提出的BA框架中的一个新设计是点簇,它通过一组紧凑的参数(点簇坐标)总结了与一个特征相关联的激光雷达扫描中的所有点。基于点簇,我们推导出了BA优化相对于其决策变量(即激光雷达位姿)的闭式导数(高达二阶)。我们证明了通过点簇可以完全表示所建模的BA优化和闭式导数,而无需枚举激光雷达扫描中的大量个别点。消除对个别原始点的依赖大大加快了代价函数和导数的计算速度,进一步使我们能够开发出高效一致的二阶求解器BALM2.0,并将其发布在Github上,以造福社区。我们的实验视频可在https://youtu.be/MDrIAyhQ-9E上观看。
我们对所提出的BA方法进行了广泛的评估。模拟研究表明,BA方法能够产生一致的激光雷达位姿估计。对19个真实世界开放序列进行的详尽基准比较表明,BA方法在位姿估计准确性、建图准确性和计算效率方面均表现出一致较高的性能,优于其他对比方法。最后,我们将BA方法集成到三个重要的激光雷达应用中:激光雷达惯性测距、多激光雷达标定和全局建图,并展示了通过所提出的BA方法如何提高它们的准确性和/或计算效率。
2. 束调整的公式和优化
在本章中,我们推导出我们的束调整公式和优化方法。首先,根据[32]的方法,我们将束调整公式化为最小化点到平面(或点到边缘)距离(第3节),并且证明了特征参数可以从公式化的优化中消除(第4节)。然后,我们在第5节介绍了点簇,基于此,我们在第6节中推导出了一阶和二阶导数。基于这些理论结果,我们在第7节中提出了我们的二阶求解器。然后,在第8节中分析了所提出的束调整的时间复杂度。最后,在第9节中,我们展示了如何估计束调整解的不确定性。在本文中,我们使用了表I中总结的符号,或者在上下文中另有说明。
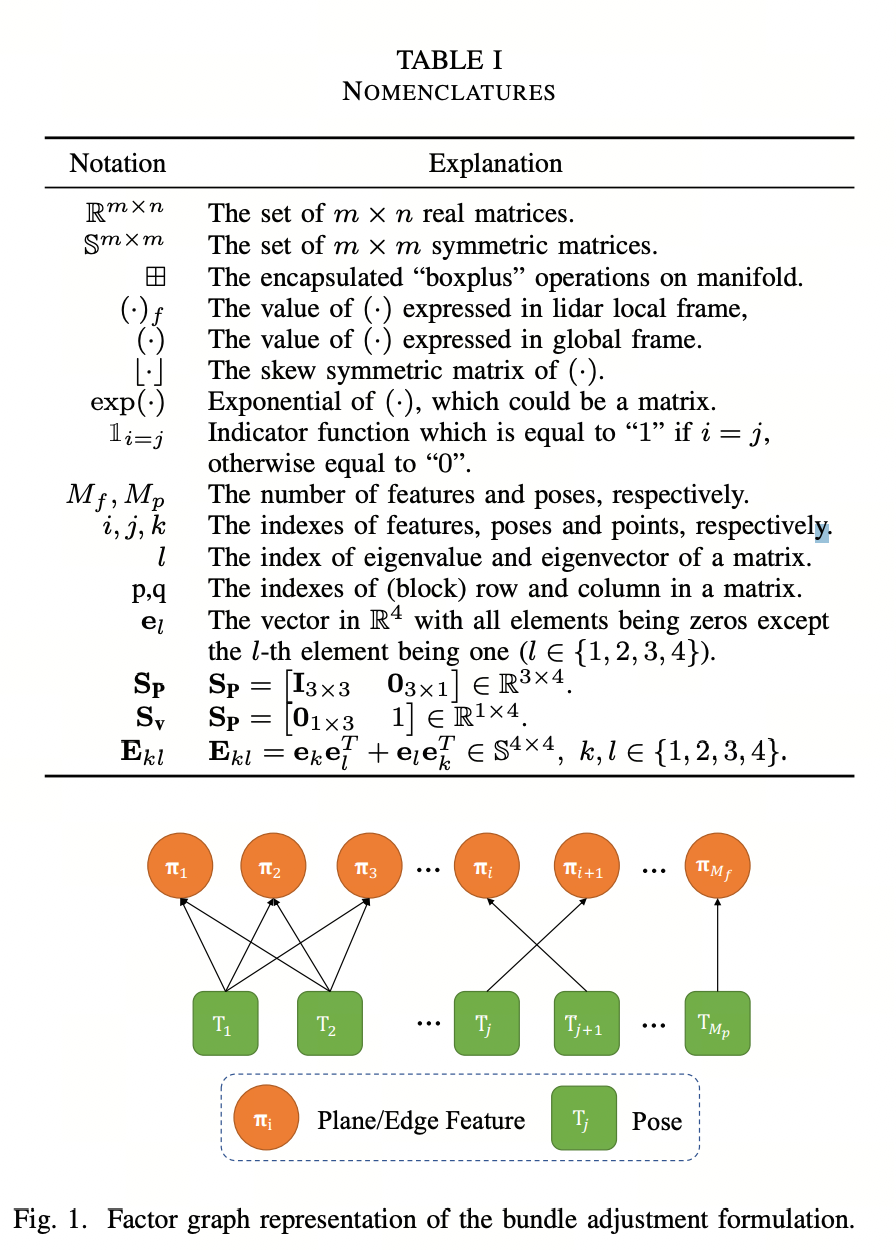
图1. 束调整公式的因子图表示
点击经典文献阅读之--BALM2(高效且一致的激光雷达点云束调整) - 古月居 (guyuehome.com)可查看全文



![[go-zero] goctl 生成api和rpc](https://img-blog.csdnimg.cn/direct/031b51d3e4474d989c127df27371ac95.png)