使用正则化子地图匹配的海底地形位姿图优化
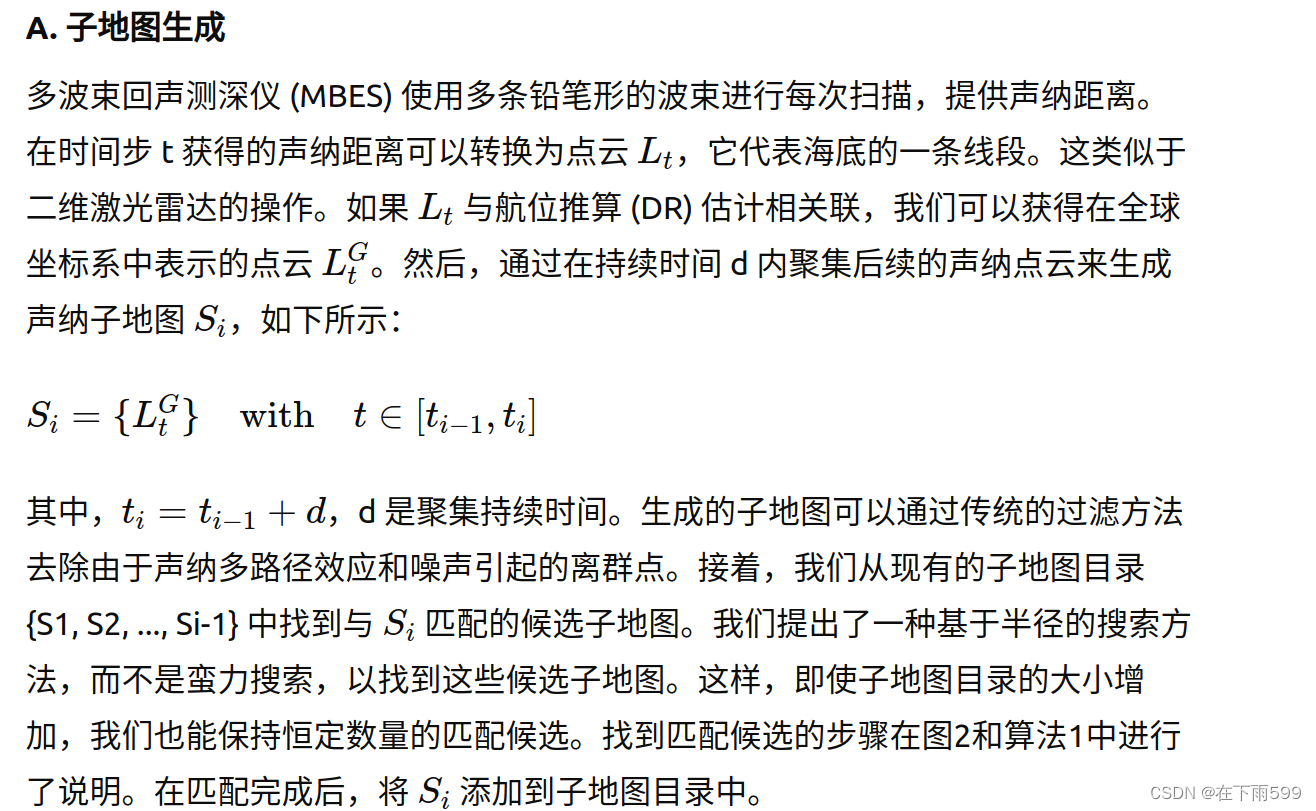
海底地形子地图匹配
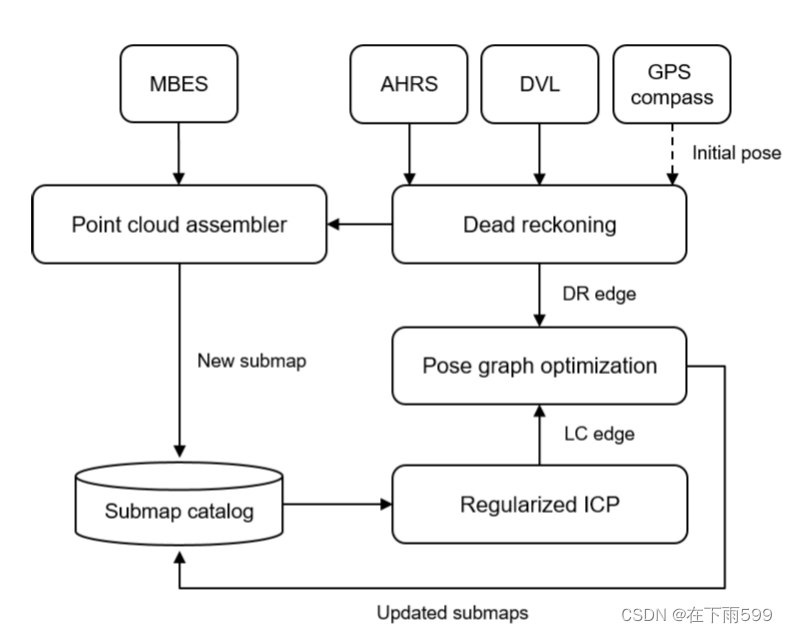
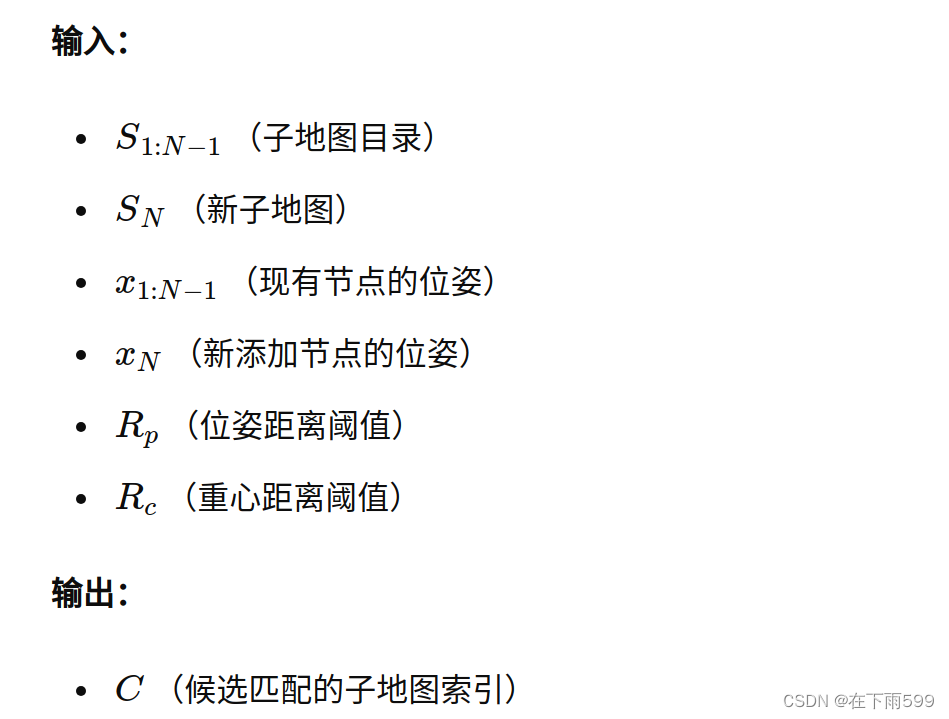
候选子地图筛选如下图:
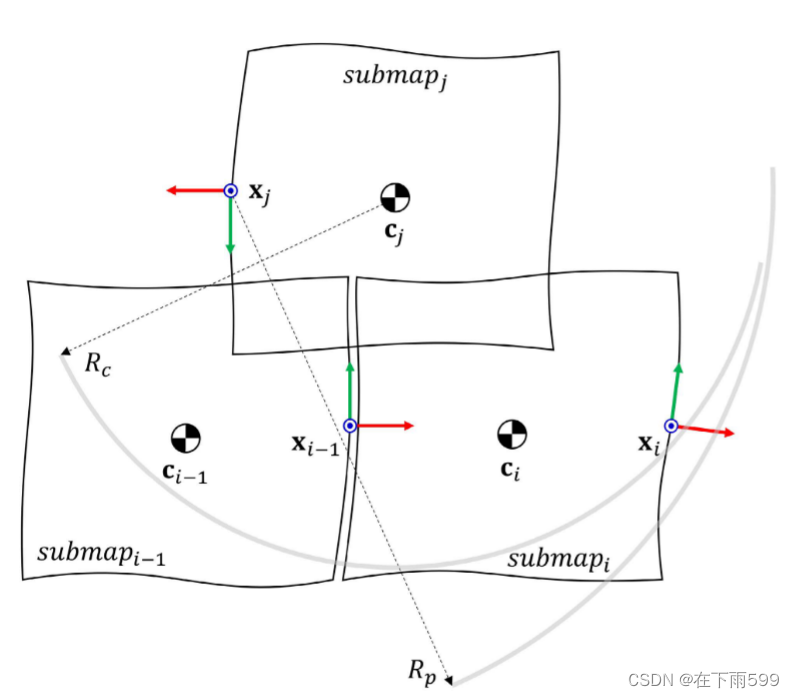
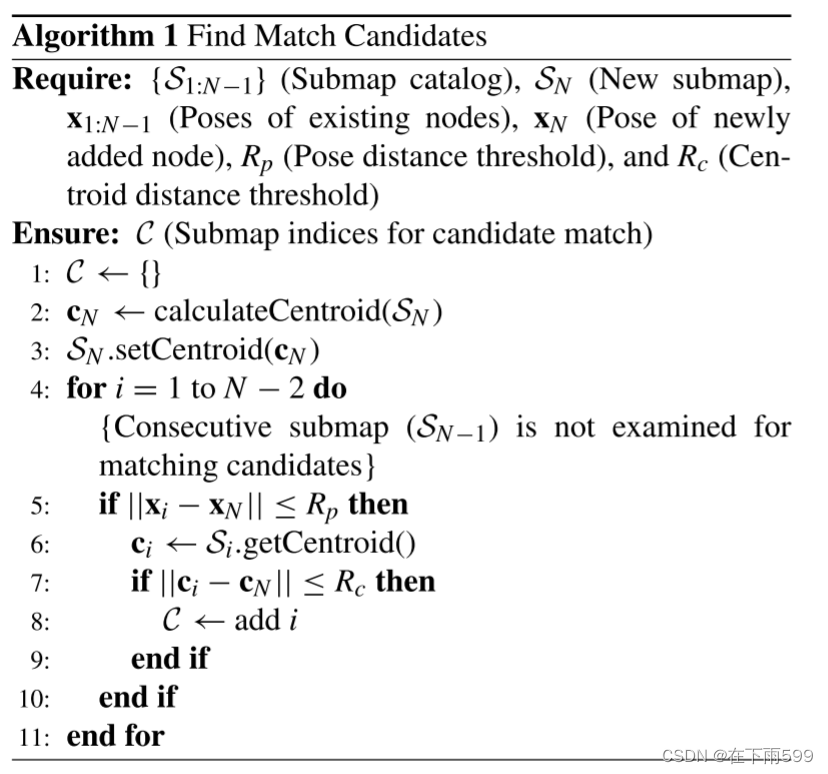
双重循环筛选位姿和重心距离
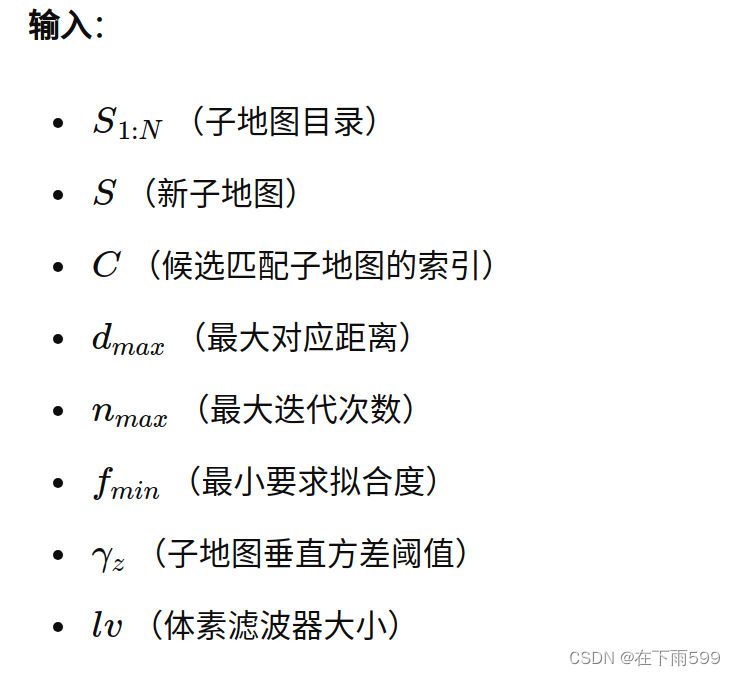
子地图匹配中的正则化
常见的两点云匹配方法包括应用ICP(迭代最近点)算法。然而,与结构化环境中获得的点云不同,海底地形的点云平坦且无特征,并且在垂直方向上的变化相对较小。这导致传统的ICP性能容易陷入局部最小值,因为在x-y平面上的平坦特征比垂直变化更为显著。为了处理这个问题,采用了广义ICP(GICP),因为GICP基于局部表面的协方差最小化子地图之间的差异。然而,对于低特征子地图,这个问题仍然存在,特别是在对子地图进行下采样时。下采样(如体素过滤)是实现在线海底地形SLAM的必要步骤,因为它显著减少了匹配过程中计算量。此外,它增强了源子地图和目标子地图中现有密度的不规则性。
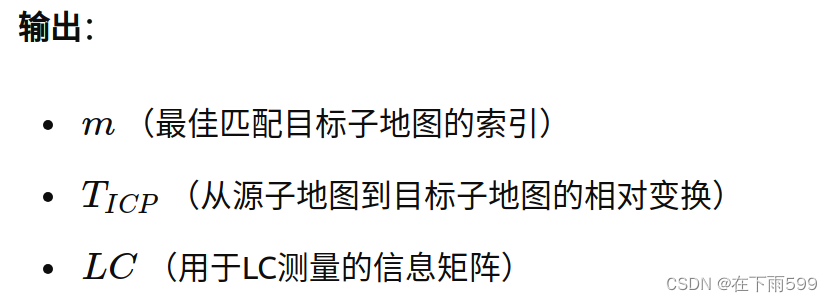
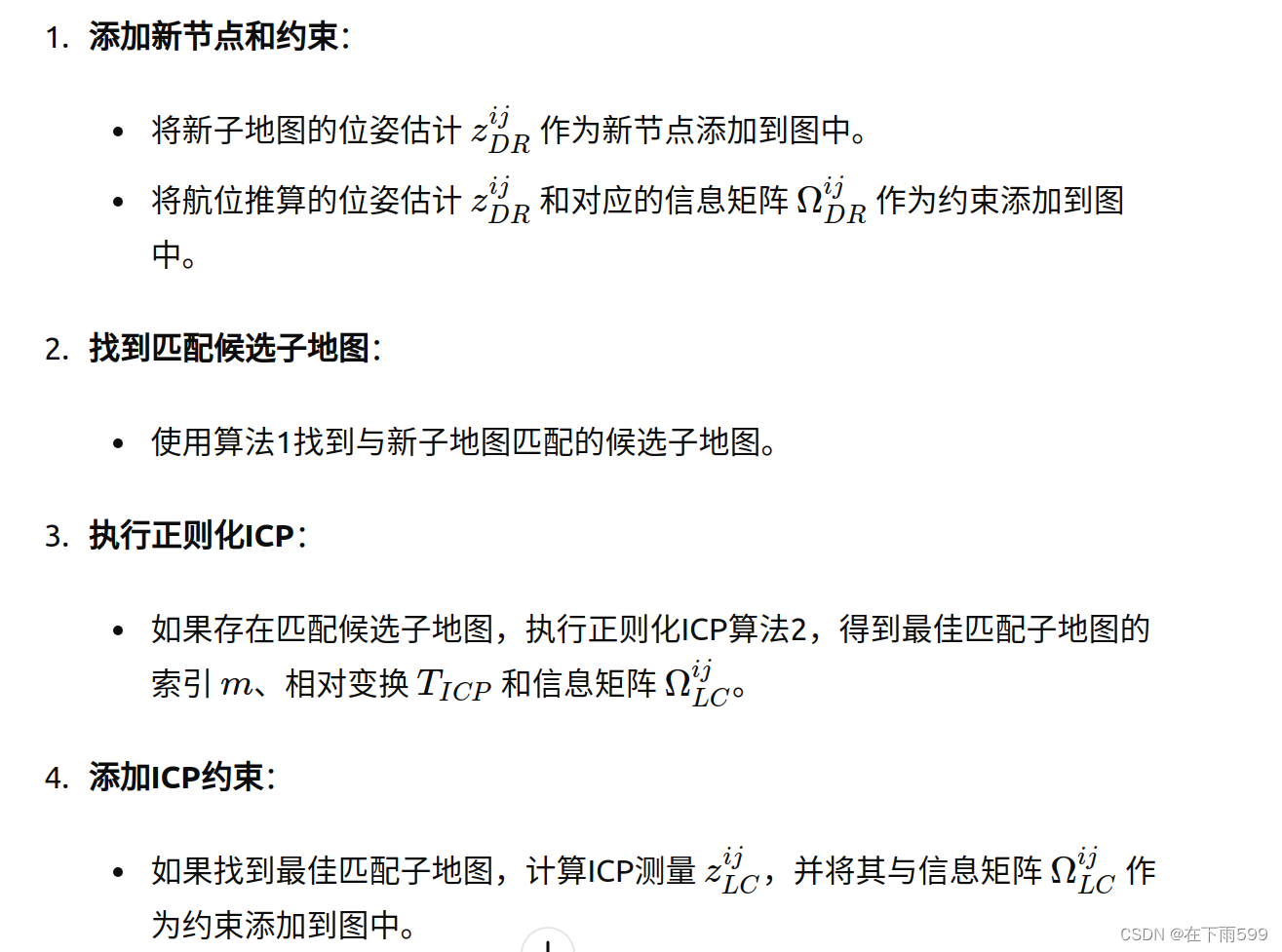
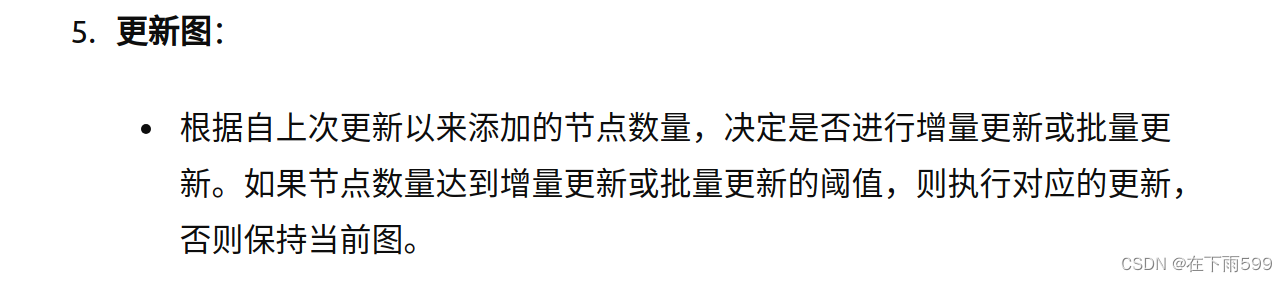
测深姿态图优化
总结