链接: 自学SLAM(2)—保姆教程教你如何使用自己的视频运行ORB-SLAM2
这篇文章是详细教怎么运行ORB-SLAM2的,那么下来我们就看看怎么运行ORB-SLAM3
理论上ORB-SLAM2的环境也是可以跑ORB-SLAM3的,因为我之前试过,编译成功了,由于某些原因,我把虚拟机给删了。所以只能从头再来!
里面很多下载网站需要用梯子才能进入,怎么科学上网大家自己探索!!
还有就是远程连接虚拟机在windows上下载传到ubuntu上,我给大家推荐WinSCP这个软件,比我前面用的Xshell,Xftp好用多了!
远程链接如果连接不上,大家自行网上搜索解决方案!
目录
- 1.github clone源码
- 2.安装Pangolin、Eigen3
- 3.安装OpenCv
- 4.安装DBoW2 and g2o、boost库
- 5.ORB-SLAM3编译和安装
- 6.数据集和运行
在此之前我默认你的Ubuntu已经安装了clone,cmake等等了
没有安装也没关系,在使用的时候他会报错,你根据报错自己安装就可以了,我相信来学SLAM的这些基本能力还是有的吧!
1.github clone源码
打开终端,输入下面这个指令,克隆ORB-SLAM3的源码
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
如果 git 拒绝连接可以直接去这个网址下载压缩包解压
注意,如果是新系统,没有安装git,则需要先装git
sudo apt-get install git
另外,如果是新系统的话,预装的vi编辑器不完整,用不了。
执行如下命令安装vi编辑器。
sudo apt-get remove vim-common
sudo apt-get install vim
2.安装Pangolin、Eigen3
Pangolin
git clone https://github.com/stevenlovegrove/Pangolin.git
Eigen3
# github 有个mirror,版本3.3.4 from 2017
git clone https://github.com/eigenteam/eigen-git-mirror
在我安装的过程中这一步经常出错,换个网络多试几次就出来了,或者也可以去下面这个网址下载压缩包
注意!!!
不要采用下面这个指令安装eigen3
sudo apt-get install libeigen3-dev
如果采用这个指令安装,默认是安装到了/usr/include/eigen3,ORB-SLAM3检测不到,导致编译会报错。利用源码安装,安装好的路径是 /usr/local/include/eigen3/
编译安装Eigen3:
在参考别的博主是先安装Pangolin再安装Eigen3的,但我实际安装的过程中发现Pangolin是依赖Eigen3的,因此应该先安装Eigen3
#安装
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install
#安装后,头文件安装在/usr/local/include/eigen3/
编译安装Pangolin:
安装依赖
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
sudo apt install cmake
sudo apt install libpython2.7-dev
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
编译安装
cd Pangolin
mkdir build
cd build
cmake ..
cmake --build .
如果cmake pangolin提示找不到epoxy,执行sudo apt-get install libepoxy-dev 就行了
3.安装OpenCv
最新的ORB-SLAM3要求OpenCV 4.4及以上
但是最好不要安装OpenCV4以上(参考博主的解释是:4默认不会生成.pc文件,最后查看版本的时候查看不到,找不到包)。具体原因不太理解,最后也选择安装3.4.3版本
首先,到官网下载源码:https://opencv.org/releases/page/5/
ps.下载其他OpenCV3版本的理论上也可以,为了避免其他错误,选择参考别的博主的版本,实验可行。
下载之后放在最开始创建的文件夹,解压
unzip opencv-3.4.3.zip
ps. 也可以直接右键提取文件
更新一下,准备安装OpenCV依赖库
sudo apt-get update
使用一条指令安装所有依赖库
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libtiff5-dev libswscale-dev libjasper-dev
# 原博客安装的是libtiff4-dev,运行过程报错,改成libtiff5-dev
注意:在运行的时候可能会出现以下报错信息
error: unable to locate libjasper-dev 无法定位这个包libjasper-dev
解决方法是:执行以下指令
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev
在执行这个命令的时候你有可能会遇到:

解决方案:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 3B4FE6ACC0B21F32
然后继续:
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt install libjasper1 libjasper-dev
其中libjasper1是libjasper-dev的依赖包
运行完这个,再安装下面这个指令就没错了
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff4.dev libswscale-dev libjasper-dev
安装好依赖,开始编译OpenCV
cd opencv-3.4.3
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
注意:执行上面指令后,终端会自动下载一个必需的ippicv加速库。
如果终端卡住并显示正在下载,只需要等一会儿不用进行任何操作。
否则,终端会显示报错,提示ippicv_2017u3_lnx_intel64_general_20170822.tgz的加速库下载失败。报错如下:
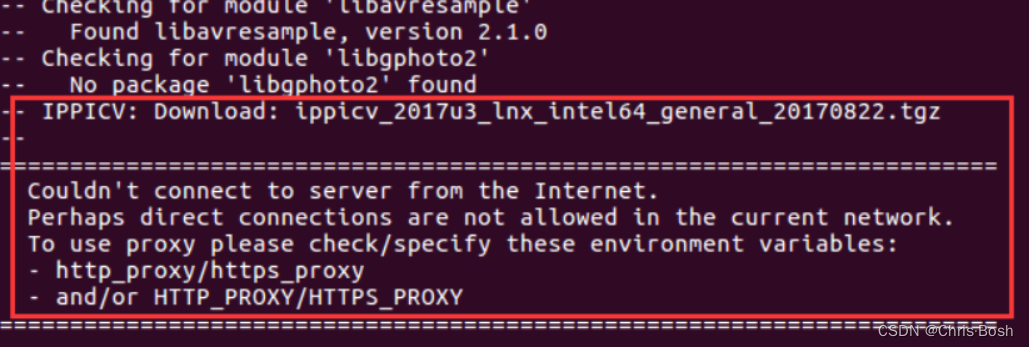
解决方法是下载离线的ippicv库
下载链接为:https://github.com/opencv/opencv_3rdparty/tree/ippicv/master_20170822
下载好之后,把这个ippicv文件夹单独拷贝出来,放到自己的文件夹中
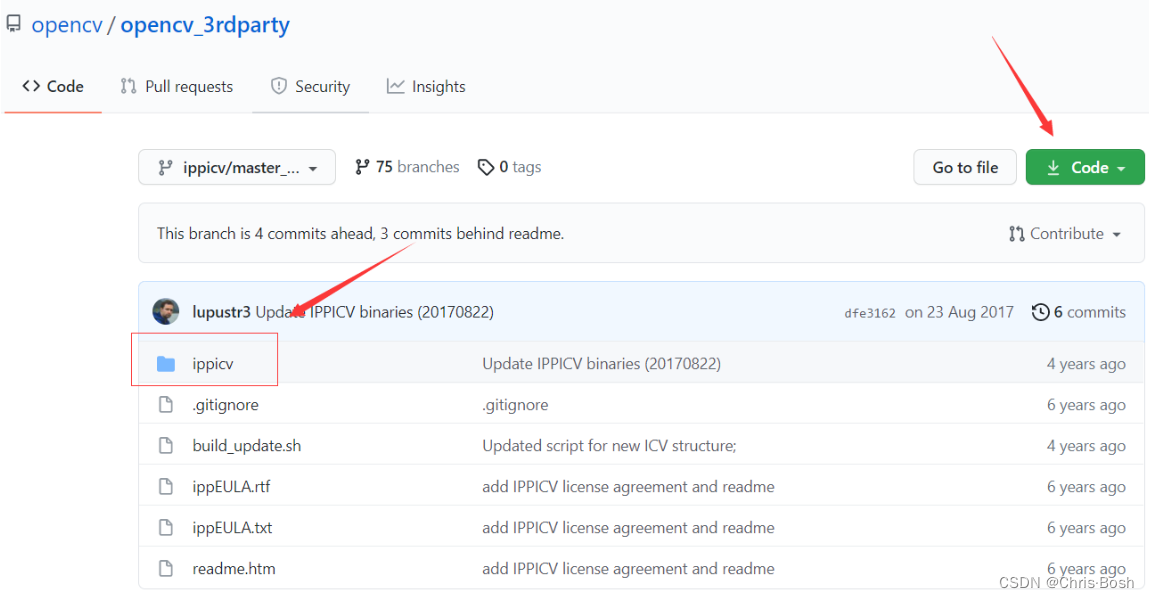
然后把OpenCV源文件中 /3rdparty/ippicv 文件夹下的 ippicv.cmake 中,
第47行"https://raw.githubusercontent.com/opencv/opencv_3rdparty/${IPPICV_COMMIT}/ippicv/" 改成你新下载的ippicv文件路径。
这样,就改成了离线编译的ippicv文件
再次执行cmake指令,完成编译
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
PS. 这一步骤在参考博客中说需要科学上网才能正常下载,否则需要自己下载离线库编译。但经过我多次尝试,不需要科学上网也能正常下载ippicv库,可以多尝试几次(下载离线库相对比较麻烦)
cmake完成之后使用make编译
ps. j4表示4核,可以根据虚拟机分配的核数进行调整,也可以不用,直接make,速度稍微慢点,但不容易出错
make -j4 //这个过程时间可能稍微长一点,完成之后,不要忘了安装
sudo make install
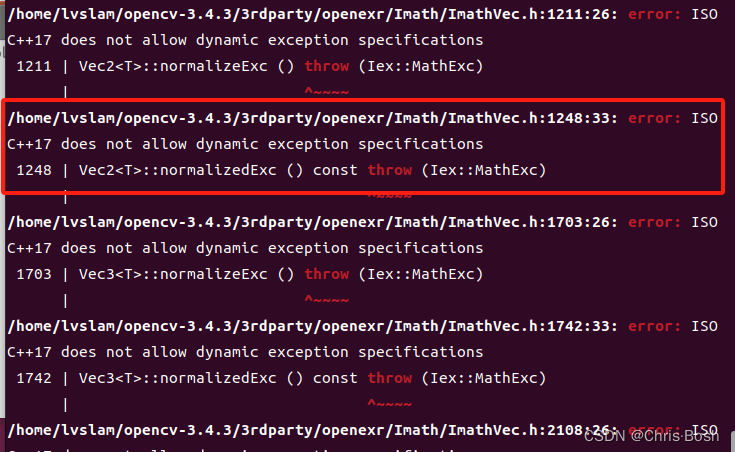
但是你可能会遇到ISO C++17 does not allow dynamic exception specifications的问题!!
这是由于gcc,g++版本过高导致的,C++17不支持动态异常规格。需要安装gcc,g++11以下(不包含11)
我们需要卸载原来的gcc,g++
//卸载高版本
sudo apt-get remove gcc
sudo apt-get remove g++
//安装低版本
sudo apt-get install gcc-9
sudo apt-get install g++-9
//设置默认编辑器
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-9 50 --slave /usr/bin/g++ g++ /usr/bin/g++-9
**然后删掉我们的opencv文件夹,从解压那里重新来一遍!!**为了不麻烦大家翻回去重新看,我在这里直接写,大家照着看就行
 删掉
删掉
然后重新解压一个新的
然后把OpenCV源文件中 /3rdparty/ippicv 文件夹下的 ippicv.cmake 中,
第47行"https://raw.githubusercontent.com/opencv/opencv_3rdparty/${IPPICV_COMMIT}/ippicv/" 改成你新下载的ippicv文件路径。
修改样例:“/home/你的用户名/某个文件/ippicv”
这样,就改成了离线编译的ippicv文件
再次执行cmake指令,完成编译
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j2//你电脑性能高你就j4 j8,j几就是几核编译,我这烂电脑j4就卡死了
sudo make install
到此,OpenCV安装结束,然后配置一下环境
sudo /bin/bash -c 'echo "/usr/local/lib" > /etc/ld.so.conf.d/opencv.conf' //添加库路径
sudo ldconfig //更新系统库
sudo gedit /etc/bash.bashrc //配置bash
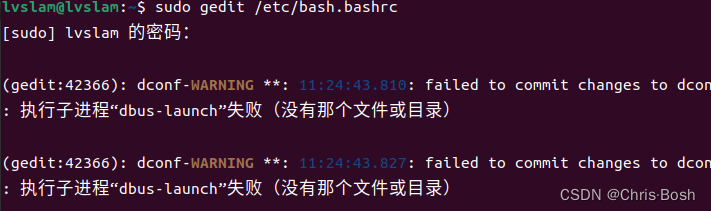
如果有这个问题,此问题的解决方案是安装’dbus-x11’。
sudo apt-get install dbus-x11
或者就不要用gedit,直接用vim不香嘛?sudo vim /etc/bash.bashrc
//在末尾添加如下两行代码↓
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
source /etc/bash.bashrc //保存,执行如下指令使得配置生效
sudo updatedb //更新
如果该指令报错,那么可能是没有安装mlocate↓
先执行安装命令
sudo apt-get install mlocate
然后再sudo updatedb
版本检测
pkg-config --modversion opencv
注意:如果执行后,显示找不到包。那么注意下载的OpenCV版本是不是3.版本的,OpenCV版本4以上的,默认不生成.pc文件,会出现找不到包的问题
输出如下,表示OpenCV完成了安装

4.安装DBoW2 and g2o、boost库
DBoW2主要用于回环检测,g2o(General Graph Optimization)主要用于图优化。
ORB-SLAM3的源码包自带DBoW2 and g2o,编译时会自动安装,不用管。
由此链接进入boost官网:https://www.boost.org/users/history/version_1_77_0.html
我下载的是1.77.0
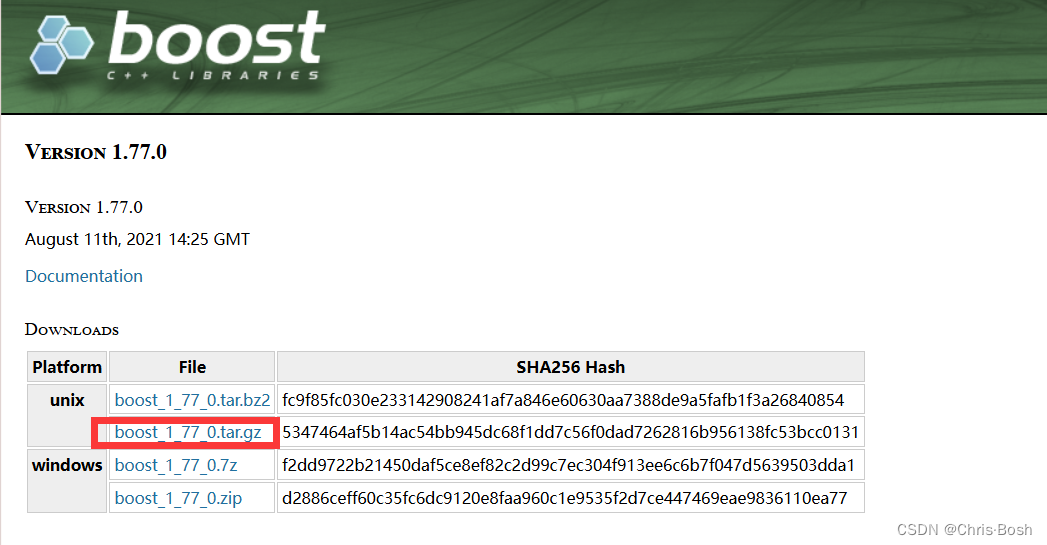
tar -xzvf boost_1_77_0.tar.gz //下载之后解压
解压之后进入解压出来的文件夹
执行下面这个脚本
cd boost_1_77_0/
sudo ./bootstrap.sh
执行完毕之后,会发现又多了些文件
再执行下面这个脚本
sudo ./b2 install
需要一段时间(挺长的),耐心等待即可
然后安装libssl-dev
执行下面这个指令
sudo apt-get install libssl-dev
5.ORB-SLAM3编译和安装
进入源码文件夹,执行下述指令
cd ORB_SLAM3
chmod +x build.sh
./build.sh
注意:这个build.sh是官方给的安装脚本,执行即可编译,但是实际操作经常会出错,太吃内存,最好不要直接运行脚本
我选择打开build.sh脚本,依次执行如下每条指令,并根据自己虚拟机分配的核数选择make后面的核数进行编译
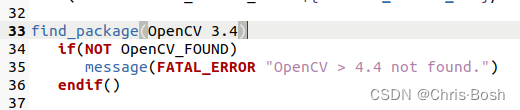
注意:在这之前先打开ORB-SLAM3对应的CMakeLists.txt
找到 find_package(OpenCV4.4)这行代码,将OpenCV版本号改为find_package(OpenCV 3.4)
因为我们之前安装的就是3.4版本的,而在最新的ORB-SLAM3中要求是4.4及以上版本,改成3.4不影响实验
然后根据build.sh的脚本一条一条的运行
直接./build.sh的话,我推荐你电脑是8核+这样,否则和我一样一条一条运行吧!
里面原本是make -j,
我运行的时候DBoW2和g2o改成make -j2,ORB-SLAM3直接make单核编译,
大家看自己电脑情况!
第三部分编译ORB-SLAM3的时候会有特别多的问题,大家编译的时候看到有红字就ctrl+c停止看错误是啥!!
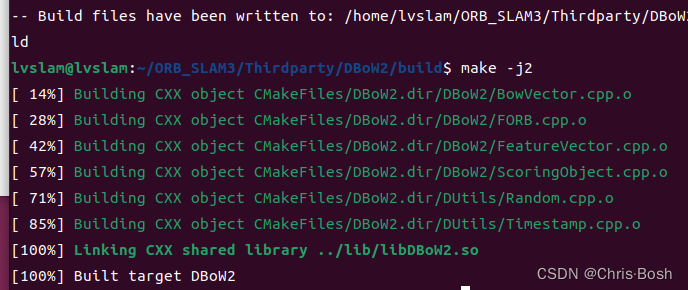
echo "Configuring and building Thirdparty/DBoW2 ..."
cd Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
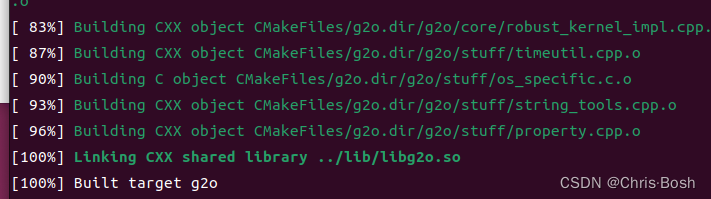
cd ../../g2o
echo "Configuring and building Thirdparty/g2o ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
cd ../../../
echo "Uncompress vocabulary ..."
cd Vocabulary
tar -xf ORBvoc.txt.tar.gz
echo "Configuring and building ORB_SLAM3 ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
第一部分DBoW2完成:
第二部分g2o完成:
第三部分需要在ORB-SLAM3路径下创建build
上面的命令在tar -xf ORBvoc.txt.tar.gz后没有返回,会出现以下错误:

第三部分ORB-SLAM3编译:
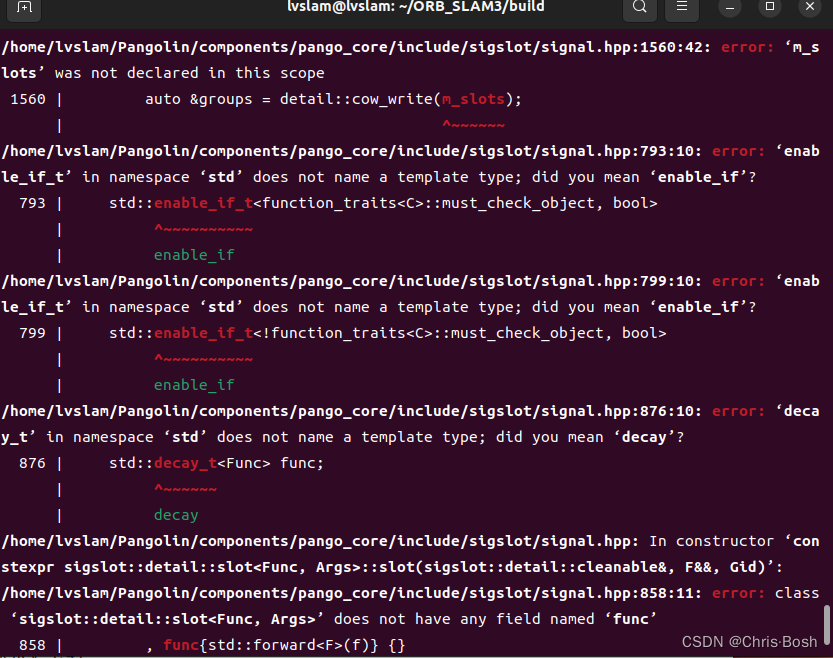
decay这个的问题出在于编译器的问题,原作者使用的是C++11编译的,从CMakeLists.txt前面几行可以看出,换用C++14可以解决该问题。解决方案:
修改CMakeLists.txt
这些注释掉
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++14" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++14.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++14 support. Please use a different C++ compiler.")
endif()
改为:
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_EXTENSIONS OFF)
add_definitions(-DCOMPILEDWITHC11)

6.数据集和运行
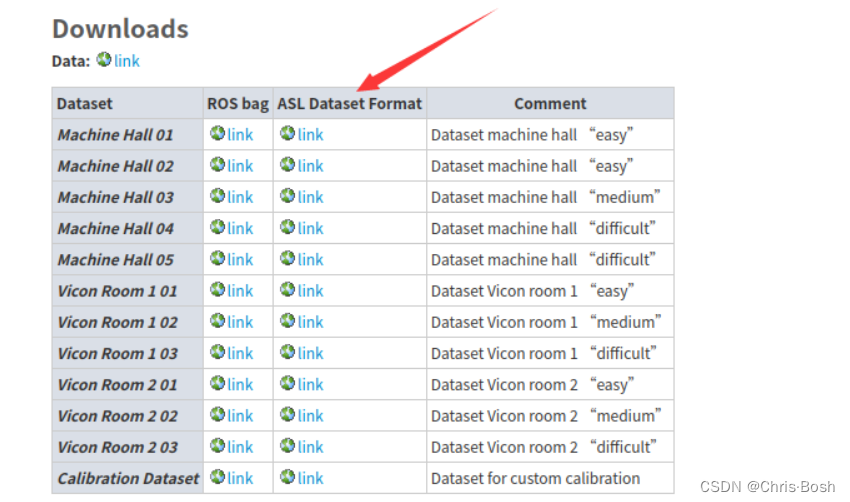
EuRoc数据集下载地址:
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets#downloads
下载比较慢,有百度网盘的可以用下面这个地址,我将所有EuRoc数据集(包括bag格式和ASL格式)都下载下来放里面了,链接永久有效
链接:https://pan.baidu.com/s/1fkLRlrhmJNdDSLuLS_uUfw 提取码:ioj3
–来自百度网盘超级会员V3的分享
要下载ASL格式的
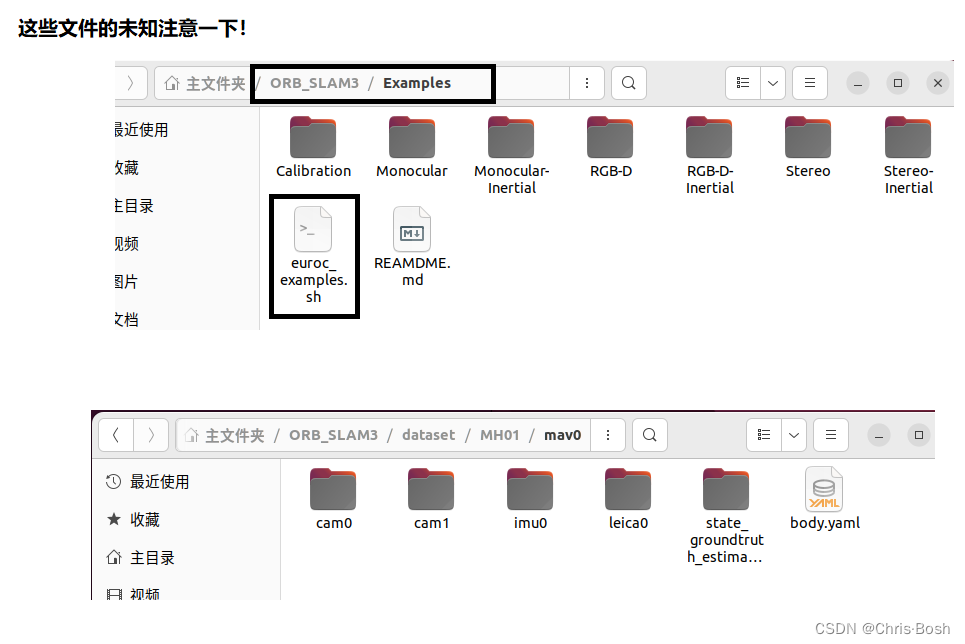
这个压缩包下好之后,解压打开之后,里面是一个mav0的文件夹(有些打开会还有一个_MACOSX 文件加,可以直接删掉,只留mav0文件夹)
具体原因是这个其实是在MAC操作系统压缩时产生的缓存垃圾,在Windows系统、Linux系统就会显示出来(大概是这意思)
然后在ORB-SLAM3文件夹下创建一个文件夹dataset,
在dataset文件夹下将解压的数据集文件夹放进来
eg. /ORB-SLAM3/dataset/V102/mav0
然后,在ORB-SLAM3的源码中,有一个Examples文件夹
里面有一个脚本euroc_examples.sh,打开这个脚本
PS. 最新的ORB-SLAM3版本已经找不到了,可以去下面这个链接拷贝过来
https://github.com/electech6/ORB_SLAM3_detailed_comments
并且里面还有ORB-SLAM3的详细注释
打开这个脚本,里面有ORB-SLAM3各种运行模式针对各个数据集的运行指令,选择下载数据集对应模式下的指令,提取出来(以第一条为例)照着我这个改一下,我改的地方用红圈圈起来了

注意一下这些文件的位置!
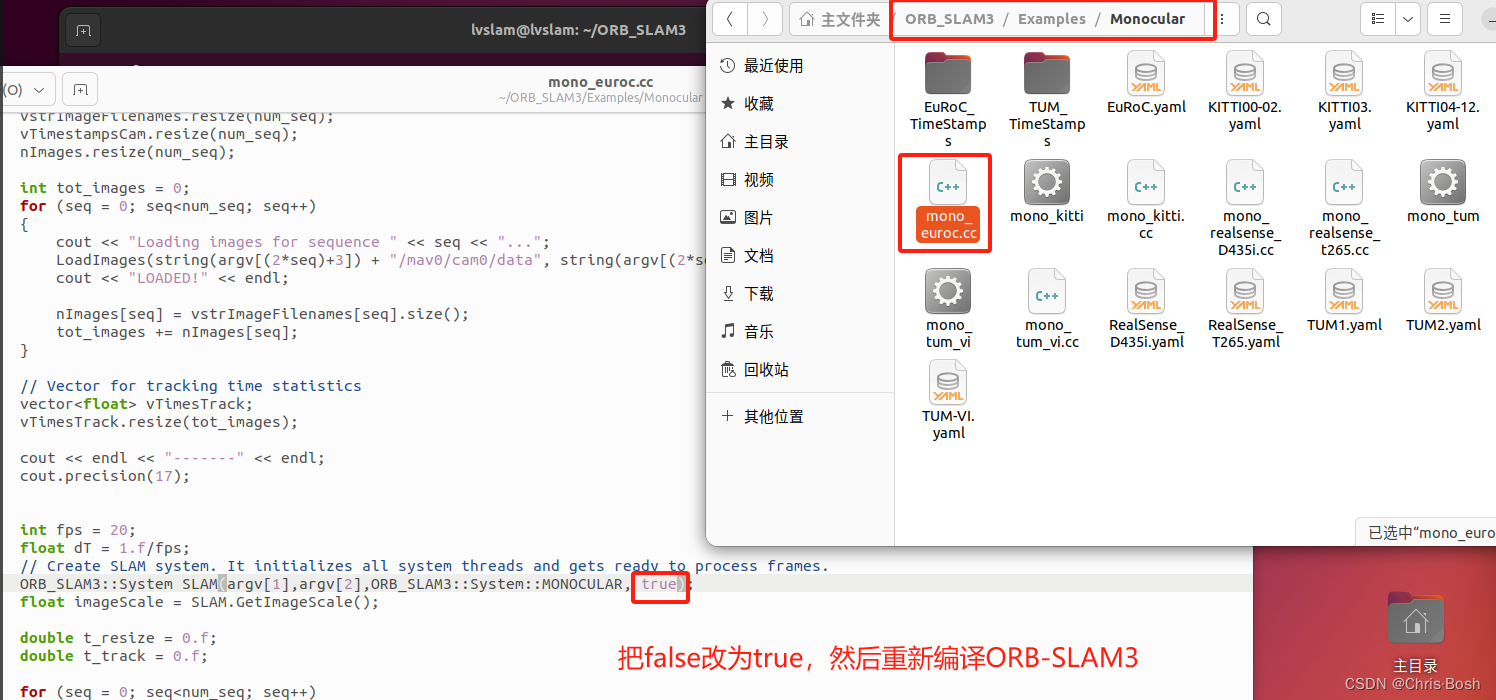
如果现在运行的话是没有图形化界面的,我们需要改一点东西
这些工作全部做好,我们基本就胜利了!!!!!
在ORB-SLAM3文件下输入指令:
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt

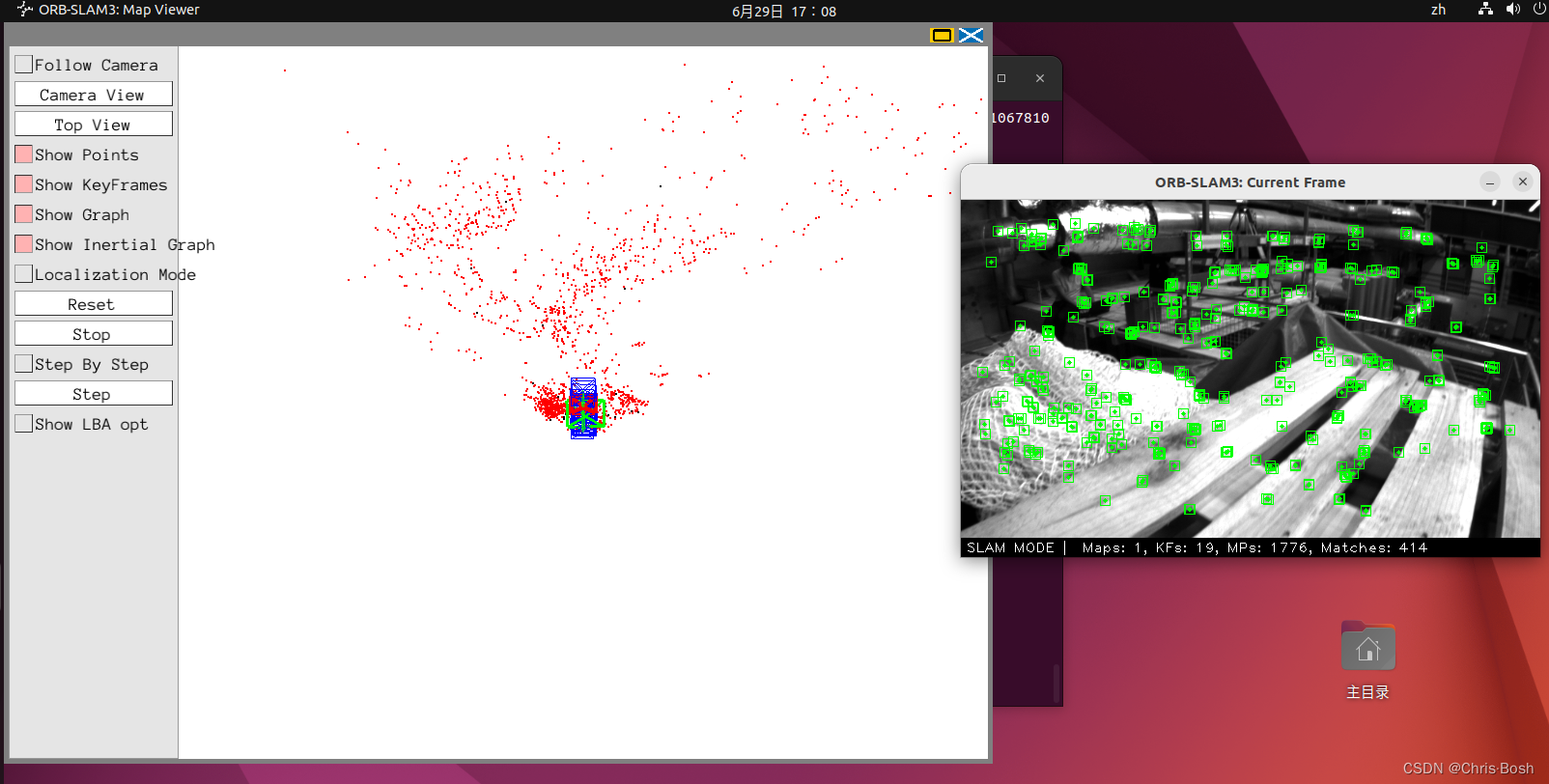
我们的ORB-SLAM3就跑出来了!!!!
![[OtterCTF 2018]Graphic‘s For The Weak](https://img-blog.csdnimg.cn/img_convert/c0a13197becf2dd5b17b407afdd28634.png)