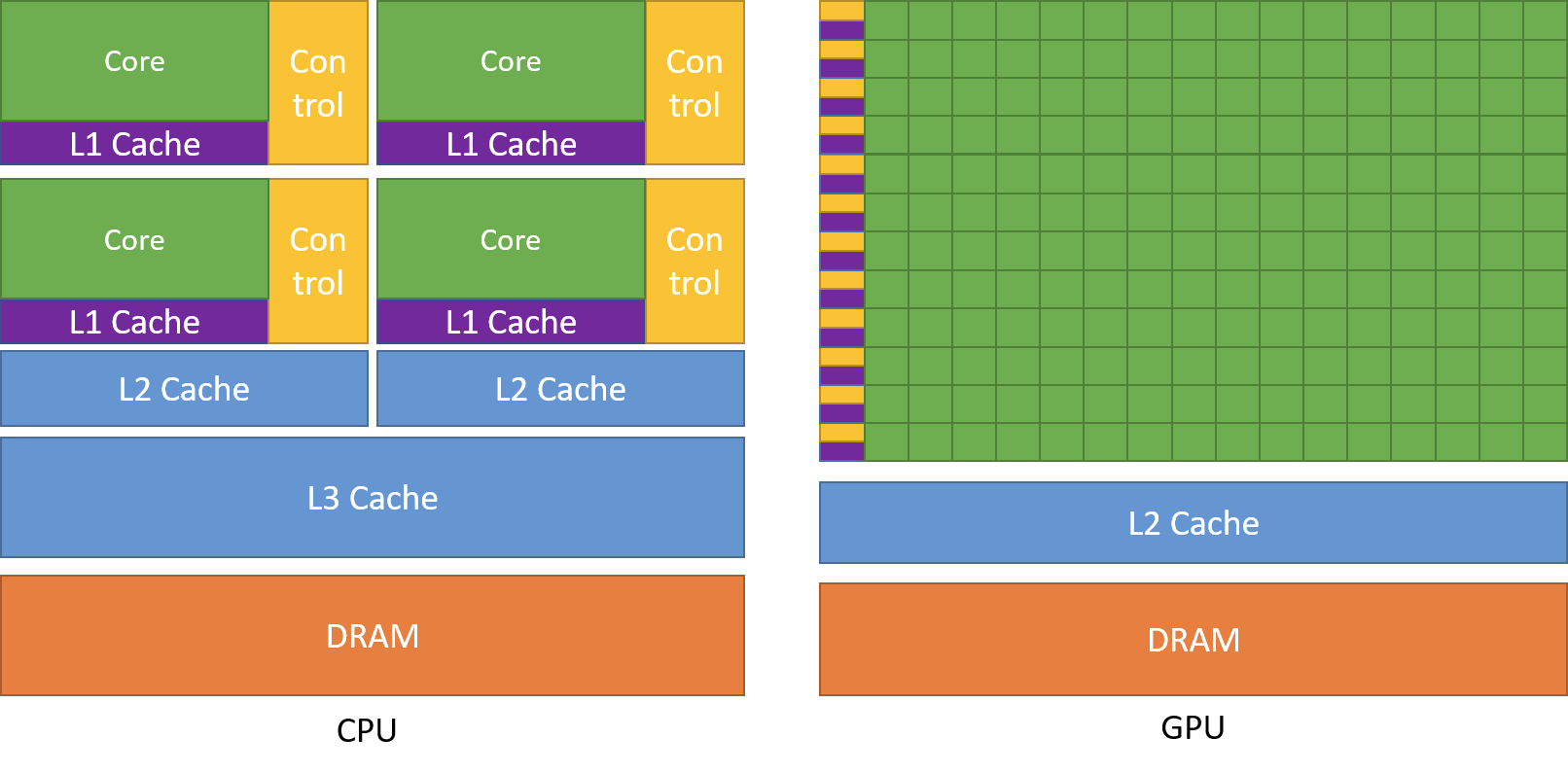
在日常深度学习和科学计算中,使用图形处理器(GPU)进行加速是一个常见的做法。CUDA (Compute Unified Device Architecture) 是英伟达公司提供的用于GPU编程的平台和编程模型。同时它是一种并行计算模型,允许开发人员使用标准C语言对GPU进行编程。CUDA的核心思想是将任务分解为多个线程,并在GPU上同时执行这些线程。GPU由多个处理器和全局内存组成,每个处理器可以执行多个线程,同时访问全局内存。通过并行执行多个线程,可以大大提高计算速度。
(1)CUDA编程模型
》 学习CUDA编程模型的基础知识:
-
Grids(网格):
- 网格是 CUDA 编程中的最高级别的组织单位。它是一个三维的结构,用于管理并行执行的线程块(blocks)。
- 网格由一个或多个线程块组成,并且可以在三个维度上指定大小(例如 (x, y, z))。
- 网格的大小决定了可以并行执行的线程块的数量。
-
Blocks(线程块):
- 线程块是网格中的次级单位,它负责管理一组并行执行的线程。
- 线程块是一个三维的结构,可以在三个维度上指定大小(例如 (x, y, z))。
- 每个线程块中的线程可以协作并共享内存,通常被设计为处理一块数据或执行一个子任务。
-
Threads(线程):
- 线程是 CUDA 编程中的最小执行单位,被组织成线程块中的集合。
- 线程通常是一维的,它们可以通过特定的线程索引访问数据并执行操作。
- 线程可以利用GPU的并行性,以高效地执行计算任务。
-
Kernel 函数:
- Kernel 函数是在GPU上并行执行的函数,它由CPU发起并在GPU上执行。
- Kernel 函数由关键字
__global__声明,用来标识它们可以被并行执行。 - 当一个Kernel函数被调用时,它在GPU设备上的多个线程中并行执行,每个线程执行同一段代码但处理不同的数据。
- Kernel 函数通常用于执行大规模数据并行计算任务,如矩阵运算、图像处理等。
- dim3数据格式
在CUDA编程中,dim3通常用于指定CUDA内核的执行配置,包括网格的维度(gridDim)和每个线程块的维度(blockDim)。dim3提供了一种方便的方式来处理一维、二维或三维的并行计算任务。
dim3 dimBlock(256); // 一维线程块,大小为256,等价于256×1×1
dim3 blockSize(16, 16); // 二维线程块大小为16x16,等级于16×16×1
dim3 dimGrid(10, 20, 30); // 三维网格,大小分别为10, 20, 30在内核启动时,如果某个维度的大小为1,CUDA运行时会理解为一维情况。例如:
kernel<<<gridSize, blockSize, 0>>>(args); // 内核启动调用在这个调用中,即使gridSize和blockSize是dim3类型,如果它们被定义为一维或二维,CUDA运行时也会正确处理它们。
补充:在CUDA编程中,__global__和__device__以及__shared__是几个重要的关键字,用于标识函数在GPU上执行的不同方式。
__device__用于声明在设备上(即GPU上)全局可见的变量或函数,__device__变量在所有线程中都是可见的,但它们存储在全局内存中,访问速度相对较慢。__device__函数可以在设备代码中被其他内核调用,类似于普通的C/C++函数。但是CUDA中用来标识在GPU上执行,但只能被设备调用的函数。__device__函数可以有返回值,并且可以被其他__device__或__global__函数调用。与__global__函数不同,__device__函数不支持被主机(CPU)直接调用,因为它们是专门为在GPU设备上运行而设计的。- __shared__用于声明在同一个线程块内所有线程共享的变量。其中
__shared__变量存储在共享内存中,访问速度比全局内存快得多,适合于线程间的数据共享和同步。但是共享内存的大小有限,且在内核启动时分配,因此需要谨慎使用以避免超出内存限制。 - __global__用于声明CUDA内核函数,这些函数可以在主机代码(cpu)中调用,并在设备上执行。
__global__函数通常用于执行大规模的并行计算任务,它们会被映射到多个线程和线程块上。但是其返回类型必须是void,想要拿到处理结果需要将其拷贝到host端才行。
在 CUDA 编程中,核函数(kernel function)是在 GPU 上执行的函数。了解如何定义和使用核函数的参数对于有效利用 GPU 资源至关重要。
》核函数定义和参数
-
核函数定义: 核函数使用
__global__修饰符来定义。核函数是从主机代码(CPU 上执行的代码)调用的,但实际在设备代码(GPU 上执行的代码)上运行。
__global__ void kernelFunction(parameters) {
// 核函数代码
}- 参数类型: 核函数的参数可以是基本数据类型、指针或 CUDA 内置类型。
__global__ void vectorAdd(const float *A, const float *B, float *C, int numElements) {
// 核函数代码
}- 线程索引
在核函数中,threadIdx、blockIdx、blockDim 和 gridDim 是 CUDA 内置变量,用于获取线程和块的索引信息。
int i = blockDim.x * blockIdx.x + threadIdx.x;》核函数调用和配置
- 核函数调用: 核函数在主机代码中使用特殊的语法调用,基本调用方式(两个值)称为网格(grid)和块(block)配置
kernelFunction<<<blocksPerGrid, threadsPerBlock>>>(parameters);其中,blocksPerGrid为每个网格中块的数量,threadsPerBlock为每个块中线程的数量。其取值尽量为选择能够被32整除的数,以便最大限度地利用GPU的线程束(warp)。
常见的还有带共享内存的调用方式(三个值),其中sharedMemSize:为每个线程块分配的共享内存大小(以字节为单位)。
kernel<<<gridSize, blockSize, sharedMemSize>>>(args);以及带执行流的调用方式(四个值),其中strea