四元数(Quaternion)是一种数学工具,广泛用于计算机图形学、机器人学和物理模拟中,特别适合处理三维旋转。Eigen库是一个高性能的C++数学库,提供了丰富的线性代数功能,其中就包括对四元数的支持。
1. 为什么选择四元数?
在计算机图形学和物理学中,四元数被广泛用来表示和计算三维旋转。相比于欧拉角和旋转矩阵,四元数具有以下优点:
- 避免万向锁(Gimbal Lock):欧拉角在某些情况下会失去一个自由度,而四元数没有这个问题。
- 高效的插值:四元数在进行插值操作时非常方便和高效,这对于动画和平滑运动至关重要。
- 节省空间:四元数只需要4个数来表示一个旋转,而旋转矩阵需要9个数。
2. Eigen库中的四元数类
Eigen库提供了Eigen::Quaternion类和相关的操作来处理四元数。Eigen::Quaternion类定义如下:
template<typename Scalar>
class Quaternion
其中 Scalar 通常为 float 或 double 类型。
3. 四元数的基本操作
创建与初始化
Eigen中可以通过不同的方式创建四元数:
- 默认构造:创建一个未初始化的四元数。
- 直接赋值:通过四个分量(w, x, y, z)来初始化。
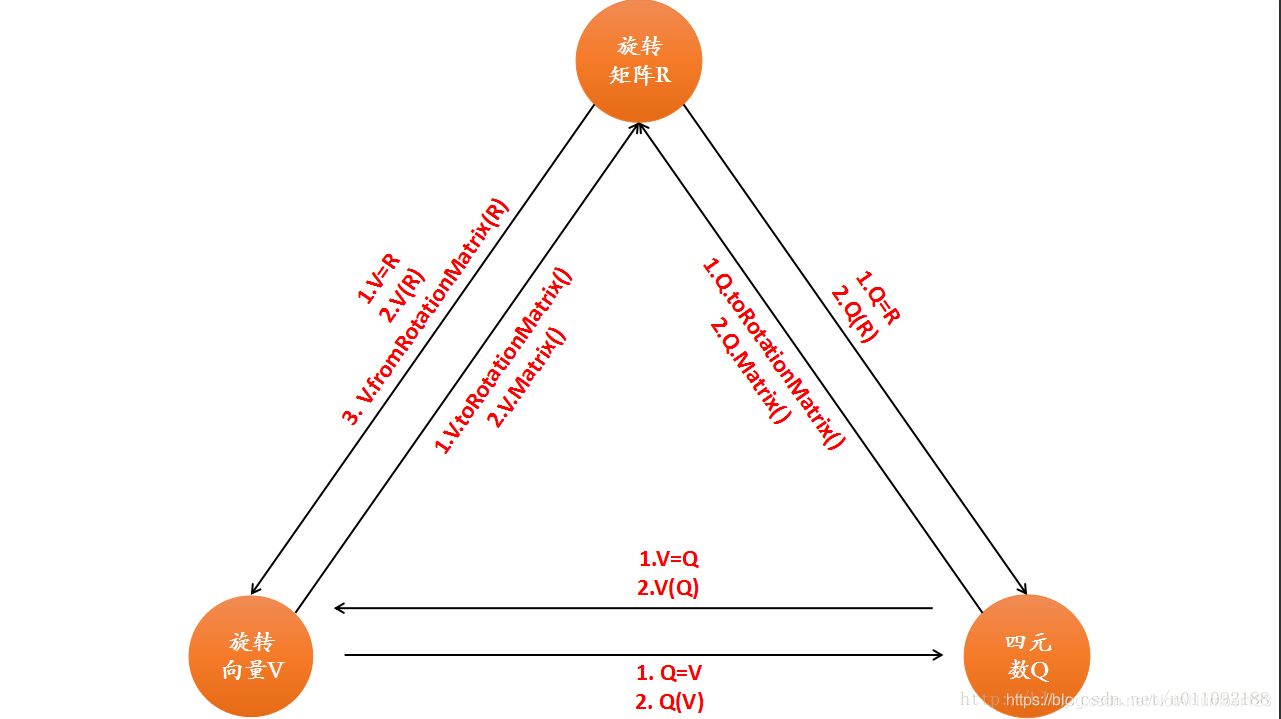
- 从旋转矩阵初始化:将旋转矩阵转换为四元数。
示例代码如下:
#include <Eigen/Geometry>
#include <iostream>
int main() {
// 通过直接赋值初始化
Eigen::Quaternionf q1(1.0, 0.0, 0.0, 0.0);
std::cout << "q1: " << q1.coeffs().transpose() << std::endl;
// 从旋转矩阵初始化
Eigen::Matrix3f rot;
rot = Eigen::AngleAxisf(M_PI / 4, Eigen::Vector3f::UnitZ());
Eigen::Quaternionf q2(rot);
std::cout << "q2: " << q2.coeffs().transpose() << std::endl;
return 0;
}
四元数和旋转矩阵的转换
四元数可以轻松转换为旋转矩阵,反之亦然:
// 四元数转旋转矩阵
Eigen::Matrix3f rotationMatrix = q2.toRotationMatrix();
// 旋转矩阵转四元数
Eigen::Quaternionf q3(rotationMatrix);
四元数乘法
四元数乘法用于组合旋转:
Eigen::Quaternionf q4 = q1 * q2;
std::cout << "q4: " << q4.coeffs().transpose() << std::endl;
四元数的共轭与逆
四元数的共轭与逆可以方便地计算:
Eigen::Quaternionf q_conjugate = q1.conjugate();
Eigen::Quaternionf q_inverse = q1.inverse();
std::cout << "Conjugate: " << q_conjugate.coeffs().transpose() << std::endl;
std::cout << "Inverse: " << q_inverse.coeffs().transpose() << std::endl;
4. 四元数插值
四元数插值(Spherical Linear Interpolation, Slerp)在动画和旋转平滑中非常有用。Eigen提供了Eigen::Quaternion类的slerp函数来实现四元数的插值:
Eigen::Quaternionf q5 = q1.slerp(0.5, q2);
std::cout << "Slerped Quaternion: " << q5.coeffs().transpose() << std::endl;
5. 结语
Eigen库中的四元数类提供了强大的工具来处理三维旋转和插值。通过Eigen库,我们可以轻松实现四元数的创建、操作和插值,从而简化复杂的三维旋转问题。






![SpringBoot学习05-[SpringBoot的嵌入式Servlet容器]](https://img-blog.csdnimg.cn/direct/7f34a7b37fdd42e1acb845e153d3511f.png)