1.前言
最近做了一个基于opencv的斜光测距的小项目,东西不多,但是很有意思,值得拿出来学一学。项目里面需要比较精确的定位功能,将前人matlab代码移植到python上,并且做了一些优化,简化逻辑(毕竟我是专业的程序员),也用了tkinter界面包装了一下,最后通过pyinstaller打包成程序给同事使用。
2.原理
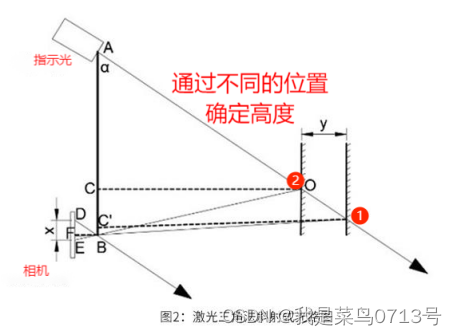
通过使用不同的亮点位置和对应的高度进行多元线性回归建模,再对新的亮点位置进行高度预测。

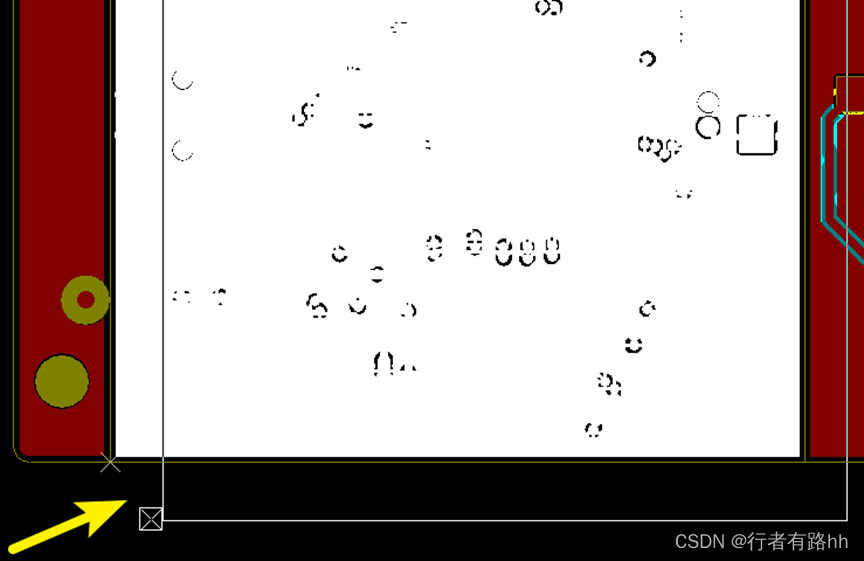
如图分别是14,14.5,15,15.5对应的四张光点位置图。
3.获取亮点位置
def get_box(image):
# 将图像转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用高斯模糊来减少噪声
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
max_val = np.max(blurred)
_, binary = cv2.threshold(blurred, max_val/2, 255, cv2.THRESH_BINARY)
# 形态学开运算去除噪声
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
opened = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel)
# 找到轮廓
contours, _ = cv2.findContours(opened, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 如果找到轮廓,计算质心
if contours:
largest_contour = max(contours, key=cv2.contourArea)
M = cv2.moments(largest_contour)
if M["m00"] != 0:
cx = int(M["m10"] / M["m00"])
cy = int(M["m01"] / M["m00"])
else:
cx, cy = 0, 0
centroid = (cx, cy)
# 计算边界框
x, y, w, h = cv2.boundingRect(largest_contour)
p=10
bbox = (x-p, y-p, w+2*p, h+2*p)
# 在图像上绘制质心和边界框
output_image = image.copy()
cv2.circle(output_image, centroid, 5, (0, 255, 0), -1)
x,y,w,h=bbox
cv2.rectangle(output_image, (x, y), (x + w, y + h), (0, 255, 0), 2)
print(f"亮点的中心位置: {centroid},亮点的边界框: {bbox}")
return centroid,bbox,output_image
else:
return None
4.建模
不想再安装其它的python包了,就基于numpy写的LineRegression。
class LinearRegression:
def __init__(self):
self.theta = None
def fit(self, X, y):
"""
训练线性回归模型
参数:
X:自变量数据,形状为 (m, n),其中 m 是样本数量,n 是特征数量
y:因变量数据,形状为 (m, 1)
"""
# 在 X 前面加一列1,以便于计算截距项
X_b = np.c_[np.ones((X.shape[0], 1)), X]
# 使用正规方程求解回归系数
self.theta = np.linalg.inv(X_b.T @ X_b) @ X_b.T @ y
def predict(self, X):
"""
对新样本进行预测
参数:
X:自变量数据,形状为 (m, n),其中 m 是样本数量,n 是特征数量
返回值:
y_pred:预测的因变量数据,形状为 (m, 1)
"""
if self.theta is None:
raise ValueError("模型未经过训练,请先调用 fit 方法")
# 在 X 前面加一列1,以便于计算截距项
X_b = np.c_[np.ones((X.shape[0], 1)), X]
# 使用训练得到的回归系数进行预测
y_pred = X_b @ self.theta
return y_pred
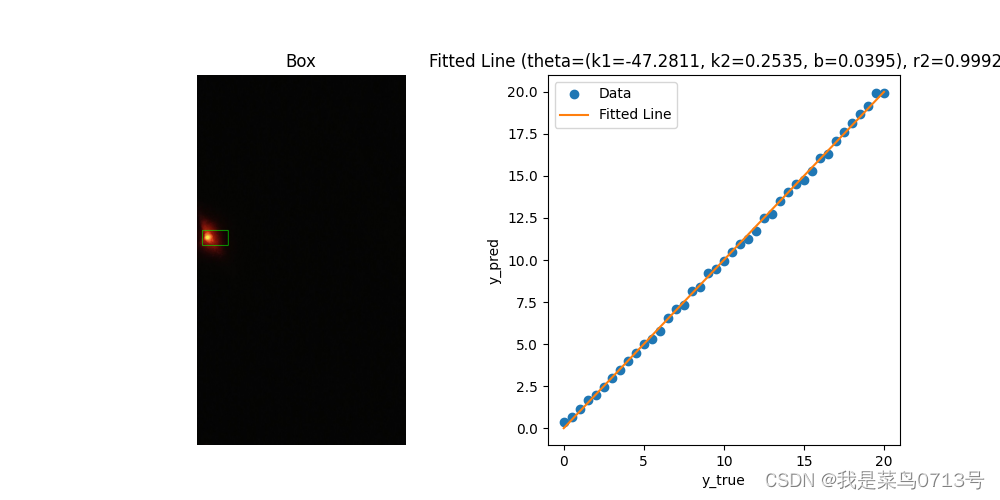
建模效果
5.全部代码
项目地址:https://gitee.com/zhang_jie_sc/auto-focus
import re
import cv2
import numpy as np
import os
from matplotlib import pyplot as plt
def get_box(image):
# 将图像转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用高斯模糊来减少噪声
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
max_val = np.max(blurred)
_, binary = cv2.threshold(blurred, max_val/2, 255, cv2.THRESH_BINARY)
# 形态学开运算去除噪声
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
opened = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel)
# 找到轮廓
contours, _ = cv2.findContours(opened, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 如果找到轮廓,计算质心
if contours:
largest_contour = max(contours, key=cv2.contourArea)
M = cv2.moments(largest_contour)
if M["m00"] != 0:
cx = int(M["m10"] / M["m00"])
cy = int(M["m01"] / M["m00"])
else:
cx, cy = 0, 0
centroid = (cx, cy)
# 计算边界框
x, y, w, h = cv2.boundingRect(largest_contour)
p=10
bbox = (x-p, y-p, w+2*p, h+2*p)
# 在图像上绘制质心和边界框
output_image = image.copy()
cv2.circle(output_image, centroid, 5, (0, 255, 0), -1)
x,y,w,h=bbox
cv2.rectangle(output_image, (x, y), (x + w, y + h), (0, 255, 0), 2)
print(f"亮点的中心位置: {centroid},亮点的边界框: {bbox}")
return centroid,bbox,output_image
else:
return None
def get_files(dir):
img_path_list = [f for f in os.listdir(dir) if
f.startswith('Point') and f.endswith('.jpg')] # 获取该文件夹中所有jpg格式的图像
val_list=[]
for p in img_path_list:
# 使用正则表达式匹配_后.前的0或0.5
match = re.search(r'_(\d+(\.\d+)?)\.', p)
if match:
val=match.group(1)
val_list.append(float(val))
else:
raise ValueError('{0}文件名错误,无法提取位置i学那些'.format(p))
return img_path_list,val_list
def merge_intersecting_boxes(boxes):
merged_boxes = []
# 计算包含所有框的大框
x_min = min(box[0] for box in boxes)
y_min = min(box[1] for box in boxes)
x_max = max(box[0] + box[2] for box in boxes)
y_max = max(box[1] + box[3] for box in boxes)
big_box = (x_min, y_min, x_max - x_min, y_max - y_min)
# 返回大框和空的合并框列表
return big_box, merged_boxes
def r2_score(y_true,y_pred):
# 计算相关系数
corr = np.corrcoef(y_true, y_pred)[0, 1]
# 计算 R 方值
r2 = corr ** 2
return r2
def plot_image_and_r2_zzz(image, x, y,r2,theta):
# 将 BGR 格式转换为 RGB 格式
image = cv2.cvtColor(image.copy(), cv2.COLOR_BGR2RGB)
# 创建一个图形和两个子图
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 5), gridspec_kw={'top': 0.85})
# 设置窗口标题方式二
fig.canvas.manager.window.title("建模结果")
# 在第一个子图中显示图片
ax1.imshow(image)
ax1.axis('off')
ax1.set_title('Box')
# 在第二个子图中显示拟合直线
ax2.plot(x, y, 'o', label='Data')
ax2.plot(x, x, label='Fitted Line')
# 将每个数字转换为字符串,保留五位小数
theta_str = "(k1={:.4f}, k2={:.4f}, b={:.4f})".format(*theta)
ax2.set_title('Fitted Line (theta={}, r2={:.5f})'.format(theta_str,r2))
# 添加轴标签
ax2.set_xlabel('y_true')
ax2.set_ylabel('y_pred')
ax2.legend()
# 显示图形
plt.tight_layout()
plt.show()
class LinearRegression:
def __init__(self):
self.theta = None
def fit(self, X, y):
"""
训练线性回归模型
参数:
X:自变量数据,形状为 (m, n),其中 m 是样本数量,n 是特征数量
y:因变量数据,形状为 (m, 1)
"""
# 在 X 前面加一列1,以便于计算截距项
X_b = np.c_[np.ones((X.shape[0], 1)), X]
# 使用正规方程求解回归系数
self.theta = np.linalg.inv(X_b.T @ X_b) @ X_b.T @ y
def predict(self, X):
"""
对新样本进行预测
参数:
X:自变量数据,形状为 (m, n),其中 m 是样本数量,n 是特征数量
返回值:
y_pred:预测的因变量数据,形状为 (m, 1)
"""
if self.theta is None:
raise ValueError("模型未经过训练,请先调用 fit 方法")
# 在 X 前面加一列1,以便于计算截距项
X_b = np.c_[np.ones((X.shape[0], 1)), X]
# 使用训练得到的回归系数进行预测
y_pred = X_b @ self.theta
return y_pred
if __name__=='__main__':
file_dir="./20240531_113524"
img_path_list, locs = get_files(file_dir)
coors = []
boxs = []
for i, image_name in enumerate(img_path_list): # 逐一读取图像
item = cv2.imread(os.path.join(file_dir, image_name))
cneter, box, _ = get_box(item)
coors.append(list(cneter))
boxs.append(box)
merge_box, _ = merge_intersecting_boxes(boxs)
# 使用线性回归拟合数据
matx = np.array(coors)
arr_x = matx[:, 0]
reg = LinearRegression()
reg.fit(matx, locs)
y_true = np.array(locs)
y_pred = reg.predict(matx)
r2 = r2_score(y_true, y_pred)
# 输出 R^2 值
draw_img = cv2.imread(os.path.join(file_dir, img_path_list[0]), cv2.IMREAD_COLOR)
x, y, w, h = merge_box
cv2.rectangle(draw_img, (x, y), (x + w, y + h), (0, 255, 0), 2)
plot_image_and_r2_zzz(draw_img, y_true, y_pred, r2, reg.theta)