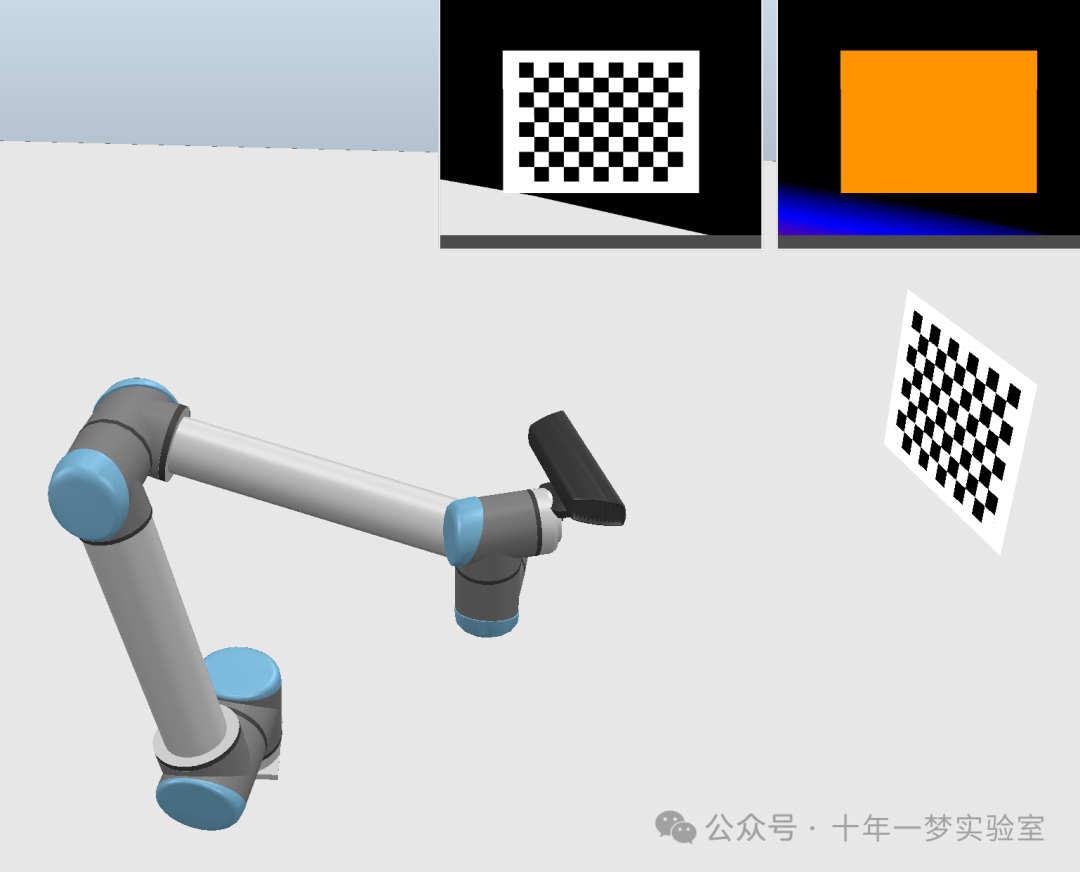
前面的章节介绍了坐标变换,以及如何设置深度相机的坐标变换。那就可以很直观从机器人的坐标系对深度相机扫描到的障碍物点云进行处理。
在实际应用中,机器人正确估计周围地形,对于道路的可通过性、路径规划和障碍物检测等方面都很重要。那么在获取深度相机点云数据后就得准确分割出地面点云,去除地面对机器人导航的干扰。
对地面点云进行分割去除,通常是使用深度相机辅助导航避障等应用前的第一个步骤。地面点云的准确去除能够显著提升机器人导航的流畅性及避障能力。本文将介绍使用PCL点云处理库对地面点云分割滤除的实现方法。

PCL介绍
PCL(英语:Point Cloud Library)是一个开源的算法库,用于处理点云和计算机视觉中的三维几何过程。
PCL包含点云滤波、特征估计、三维重建、点云配准、模型拟合、目标识别和分割等算法。
对PCL库使用的入门,可以到官方网站https://pointclouds.org/ 进行详细的学习。
PCL库本身已经包含了与ROS点云数据类型进行互相转换的功能,所以在ROS中使用起来非常方便。
地面点云滤除流程
地面点云滤除的主要目的是从