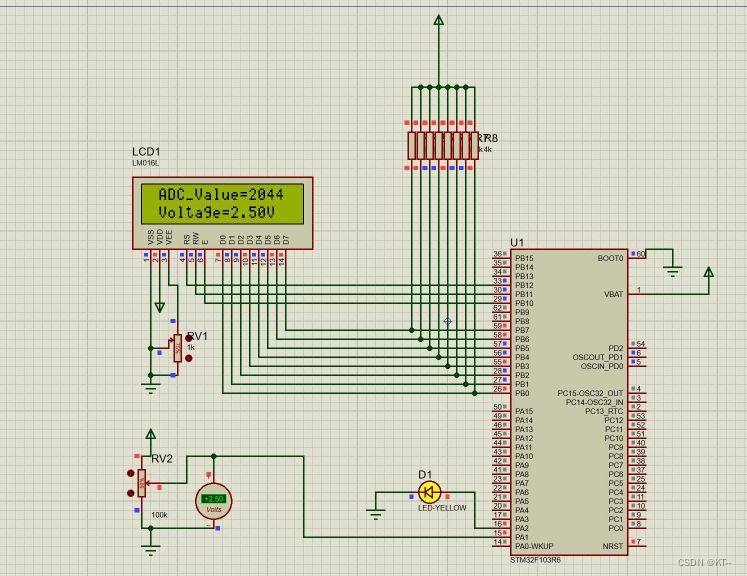
概述:Serial Peripheral Interface,一组多从 传输速率比I2C快 但是线多 无应答
是一种同步(具有时钟线需要同步时钟SCL)、串行(一位一位的往一个方向发送)、全双工(发送接收同时)通信总线。
(1)硬件电路 所有SPI设备的SCK、MOSI、MISO分别连接在一起
设备的主机多出来的SS控制线,分别接到从机的SS引脚
引脚配置为推挽输出,输入引脚配置为浮空或上拉输入。

(2)SPI时序基本单元
起始条件:SS从高电平切换到低电平
终止条件:SS从低电平切换到高电平
SPI四种时序模式(交换一个字节)
模式0;CPOL=0:空闲状态时,SCK为低电平
CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据

模式1;CPOL=0:空闲状态时,SCK为低电平
CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据

模式2;CPOL=1:空闲状态时,SCK为高电平
CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据

模式3;CPOL=1:空闲状态时,SCK为高电平
CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据

(3)SPI的基本的读写通讯过程
发送指令
向SS指定的设备,发送指令(0x06)

指定地址写
向SS指定的设备,发送写指令(0x02),
随后在指定地址(Address[23:0])下,写入指定数据(Data)

指定地址读
向SS指定的设备,发送读指令(0x03),
随后在指定地址(Address[23:0])下,读取从机数据(Data)

(4)软件读取SPI 的代码程序部分(主要是如何写时序复现时序的代码)
void MySPI_W_SS(uint8_t BitValue)
{
GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue);
}
void MySPI_W_SCK(uint8_t BitValue)
{
GPIO_WriteBit(GPIOA, GPIO_Pin_5, (BitAction)BitValue);
}
void MySPI_W_MOSI(uint8_t BitValue)
{
GPIO_WriteBit(GPIOA, GPIO_Pin_7, (BitAction)BitValue);
}
uint8_t MySPI_R_MISO(void)
{
return GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6);
}
void MySPI_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
MySPI_W_SS(1);
MySPI_W_SCK(0);
}
void MySPI_Start(void)
{
MySPI_W_SS(0);
}
void MySPI_Stop(void)
{
MySPI_W_SS(1);
}
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{
uint8_t i, ByteReceive = 0x00;
//参考上述时序图0 先移位 上升沿 再移位 下降沿 看图可得
for (i = 0; i < 8; i ++)
{
MySPI_W_MOSI(ByteSend & (0x80 >> i));
MySPI_W_SCK(1);
if (MySPI_R_MISO() == 1){ByteReceive |= (0x80 >> i);}
MySPI_W_SCK(0);
}
return ByteReceive;
}




![[C++深入] --- malloc/free和new/delete](https://img-blog.csdnimg.cn/direct/41e1a2ecc9be486d85ac0515f7ee226d.png)