操作系统 : Linux
采集方式 : v4l2(video4linux2)
设备目录 :/dev/video0
Linux系统
Linux采集的核心组件名称叫:v4l2即video4linux2的简称。是Linux中关于视频设备的内核驱动,在Linux中,视频设备是设备文件,可以像访问普通文件一样对其进行读写,摄像头设备文件位置是/dev/video0。
查看相机设备
方法一,直接通过ls查看/dev/目录下设备列表
ls /dev/video*
方法二,通过ffmpeg的ffprobe命令来查看连接到系统中的摄像头设备:
FFmpeg命令行安装
sudo apt-get install ffmpeg
ffprobe /dev/video0
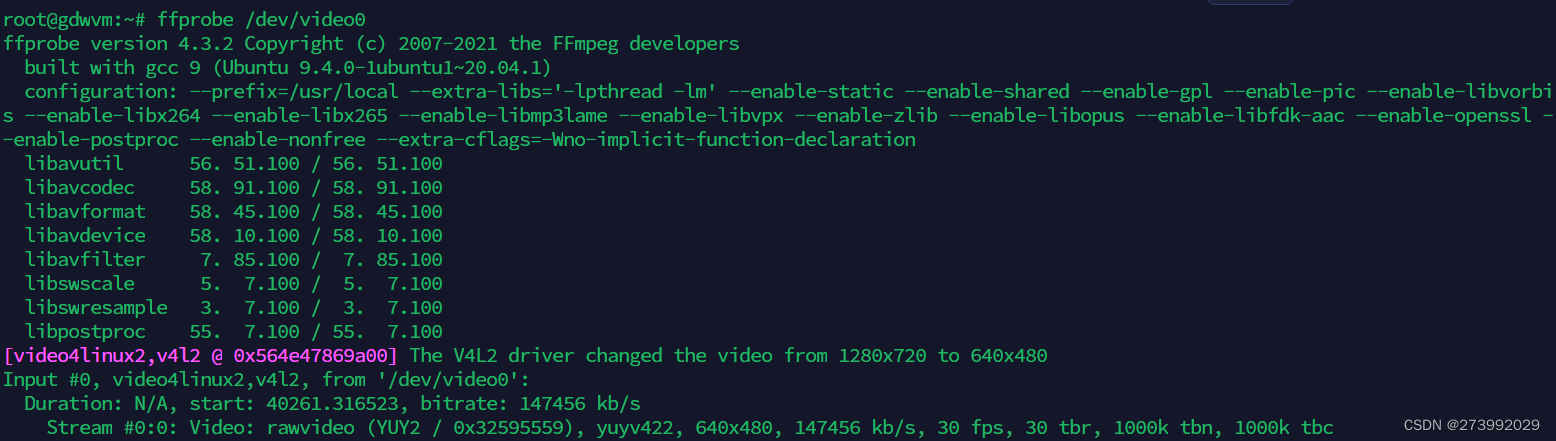 video0设备采集出来的裸帧格式是:yuyv422,帧率30fps,分辨率640x480,因此在保存摄像头数据的时候,先对yuyu422的格式进行变化,将其变换为yuv420p的格式,然后再进行编码保存为h264的文件。
video0设备采集出来的裸帧格式是:yuyv422,帧率30fps,分辨率640x480,因此在保存摄像头数据的时候,先对yuyu422的格式进行变化,将其变换为yuv420p的格式,然后再进行编码保存为h264的文件。
v4l2 常用命令
获取设备列表
v4l2-ctl --list-devices
#List supported video formats and resolutions of default video device
v4l2-ctl --list-formats-ext
#List supported video formats and resolutions of a specific video device:
v4l2-ctl --list-formats-ext --device path/to/video_device
#eg:
v4l2-ctl --list-formats-ext --device /dev/video0
#Get all details of a video device:
v4l2-ctl --all --device path/to/video_device
#eg:
v4l2-ctl --all --device /dev/video0
#Capture a JPEG photo with a specific resolution from video device:
v4l2-ctl --device path/to/video_device --set-fmt-video=width=width,height=height,pixelformat=MJPG --stream-mmap --stream-to=path/to/output.jpg --stream-count=1
#eg:
v4l2-ctl --device /dev/video0 --set-fmt-video=width=1280,height=720,pixelformat=MJPG --stream-mmap --stream-to=/home/nvidia/Pictures/video0-output.jpg --stream-count=1
#Capture a raw video stream from video device:
v4l2-ctl --device path/to/video_device --set-fmt-video=width=width,height=height,pixelformat=format --stream-mmap --stream-to=path/to/output --stream-count=number_of_frames_to_capture
#eg:
v4l2-ctl --device /dev/video0 --set-fmt-video=width=1280,height=720,pixelformat=MJPG --stream-mmap --stream-to=/home/nvidia/Pictures --stream-count=10
#List all video device's controls and their values:
v4l2-ctl --list-ctrls --device /path/to/video_device
#eg:
v4l2-ctl --list-ctrls --device /dev/video0
测试相机可用性
$ cheese -d /dev/video0
$ ffplay -f v4l2 -input_format bayer_bggr16le -video_size 640x480 -i /dev/video0
代码
cmmon.h
#ifndef COMMON_H
#define COMMON_H
#ifdef __cplusplus
extern "C" {
#endif
#include <linux/videodev2.h>
//c varable
extern struct v4l2_fmtdesc fmtd[20];
extern unsigned char * displaybuf; //v4l2 video buffer
extern int current_video_state;
typedef struct buffer{
void *start;
unsigned int length;
}buffer;
//define
#define SRC_WIDTH 1280
#define SRC_HEIGHT 720
#define DST_WIDTH 1280
#define DST_HEIGHT 720
#define NB_BUFFER 4
#ifdef __cplusplus
}
#endif
#endif
v4l2.h
#ifndef V4L2_H
#define V4L2_H
#include <fcntl.h>
#include <linux/fb.h>
#include <linux/videodev2.h>
#include <poll.h>
#include <pthread.h>
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <sys/stat.h>
#include <sys/time.h>
#include <sys/types.h>
#include <time.h>
#include <unistd.h>
#include <errno.h>
#include "config.h"
#ifdef __cplusplus
extern "C" {
#endif
//function
int c_OpenDevice(char* video);
void c_CloseDevice(int videofd);
int c_FormatDevice(unsigned int pixformat, int videofd);
int c_RequestBuffer(buffer *vbuffer, int videofd);
int c_GetBuffer(unsigned char* yuvBuffer, buffer *vbuffer, int videofd);
void c_DeintDevice(int videofd, buffer *vbuffer);
void c_NV12_TO_RGB24(unsigned char *yuyv, unsigned char *rgb, int width, int height);
void c_yuyv_to_rgb(unsigned char *yuyvdata, unsigned char *rgbdata, int w, int h);
//varable
#ifdef __cplusplus
}
#endif
#endif
CAMERATHREAD1.H
#ifndef CAMERATHREAD1_H
#define CAMERATHREAD1_H
#include <QObject>
#include <QThread>
#include <QDebug>
class CameraThread1 : public QThread
{
Q_OBJECT
public:
CameraThread1();
void run() override;
void getCam1Buf();
bool previewCam1 = true;
QString camera1Dev="";
signals:
void showCamera1(unsigned char *buffer);
};
#endif // CAMERATHREAD1_H
MAINWINDOW.H
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include <QMainWindow>
#include <QLabel>
#include "common.h"
#include "camerathread1.h"
QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
QT_END_NAMESPACE
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
MainWindow(QWidget *parent = nullptr);
~MainWindow();
void checkIspServer();
private:
Ui::MainWindow *ui;
// QLabel *camera1;
CameraThread1 *cameraThread1;
Common common;
public slots:
void displayCam1Buf(unsigned char *buffer);
camerathread1.cpp
#include "camerathread1.h"
#include "v4l2.h"
CameraThread1::CameraThread1()
{
}
void CameraThread1::run()
{
msleep(200);
getCam1Buf();
}
void CameraThread1::getCam1Buf()
{
unsigned char *yuvBuffer = (unsigned char*)malloc(SRC_WIDTH * SRC_HEIGHT * 3);
unsigned char *rgbBuffer = (unsigned char*)malloc(SRC_WIDTH * SRC_HEIGHT * 3);
buffer * vbuffer;
vbuffer = (buffer*)calloc (NB_BUFFER, sizeof (*vbuffer));
int fd = c_OpenDevice(camera1Dev.toLocal8Bit().data());
if(fd < 0) return;
c_FormatDevice(V4L2_PIX_FMT_YUYV, fd);
c_RequestBuffer(vbuffer, fd);
while (previewCam1) {
if(c_GetBuffer(yuvBuffer, vbuffer, fd) != 0) return;
//c_NV12_TO_RGB24(yuvBuffer, rgbBuffer, SRC_WIDTH, SRC_HEIGHT);
c_yuyv_to_rgb(yuvBuffer, rgbBuffer, SRC_WIDTH, SRC_HEIGHT);
emit showCamera1(rgbBuffer);
msleep(1000/30);
}
//close camera
c_DeintDevice(fd, vbuffer);
c_CloseDevice(fd);
}
v4l2.c
#include "v4l2.h"
int buf_type = -1;
int current_video_state = 0;
struct v4l2_fmtdesc fmtd[];
struct v4l2_format format;
unsigned char * displaybuf = NULL;
unsigned char * rgb24 = NULL;
int c_OpenDevice(char *video)
{
struct v4l2_capability cap;
struct v4l2_fmtdesc fmtdesc;
/* open video */
int videofd = open(video, O_RDWR);
if ( -1 == videofd ) {
printf("Error: cannot open %s device\n",video);
return videofd;
}
printf("The %s device was opened successfully.\n", video);
/* check capability */
memset(&cap, 0, sizeof(struct v4l2_capability));
if ( ioctl(videofd, VIDIOC_QUERYCAP, &cap) < 0 ) {
printf("Error: get capability.\n");
goto fatal;
}
/* query all pixformat */
if (cap.capabilities & V4L2_CAP_VIDEO_CAPTURE){
buf_type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
}else if(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE_MPLANE){
buf_type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
}else{
printf("Error: application not support this device %s.\n",video);
goto fatal;
}
memset(fmtd, 0, sizeof(fmtd));//note: nedd clean array first.
fmtdesc.index=0;
fmtdesc.type=buf_type;
while(ioctl(videofd, VIDIOC_ENUM_FMT, &fmtdesc) != -1) {
fmtd[fmtdesc.index] = fmtdesc;
// printf("\t%d.%s\n",fmtdesc.index+1,fmtdesc.description);
fmtdesc.index++;
}
return videofd;
fatal:
c_CloseDevice(videofd);
}
int c_FormatDevice(unsigned int pixformat, int videofd)
{
/* set format */
memset(&format, 0, sizeof(struct v4l2_format));
format.type = buf_type;
if (format.type == V4L2_BUF_TYPE_VIDEO_CAPTURE){
format.fmt.pix.width = SRC_WIDTH;
format.fmt.pix.height = SRC_HEIGHT;
format.fmt.pix.pixelformat = pixformat;
format.fmt.pix.field = V4L2_FIELD_ANY;
printf("VIDIO_S_FMT: type=%d, w=%d, h=%d, fmt=0x%x, field=%d\n",
format.type, format.fmt.pix.width,
format.fmt.pix.height, format.fmt.pix.pixelformat,
format.fmt.pix.field);
}else{
format.fmt.pix_mp.width = SRC_WIDTH;
format.fmt.pix_mp.height = SRC_HEIGHT;
format.fmt.pix_mp.pixelformat = pixformat;
format.fmt.pix_mp.field = V4L2_FIELD_ANY;
printf(">> VIDIO_S_FMT: type=%d, w=%d, h=%d, fmt=0x%x, field=%d\n",
format.type, format.fmt.pix_mp.width,
format.fmt.pix_mp.height, format.fmt.pix_mp.pixelformat,
format.fmt.pix_mp.field);
}
if (ioctl(videofd, VIDIOC_S_FMT, &format) < 0) {
printf("Error: set format %d.\n", errno);
return errno;
}
/* get format */
if (ioctl(videofd, VIDIOC_G_FMT, &format) < 0) {
printf("Error: get format %d.\n", errno);
return errno;
}
printf("VIDIO_G_FMT: type=%d, w=%d, h=%d, fmt=0x%x, field=%d\n",
format.type, format.fmt.pix.width,
format.fmt.pix.height, format.fmt.pix.pixelformat,
format.fmt.pix.field);
return 0;
}
int c_RequestBuffer(buffer *vbuffer, int videofd)
{
struct v4l2_requestbuffers reqbuf;
struct v4l2_buffer v4l2_buf;
/* buffer preparation */
memset(&reqbuf, 0, sizeof(struct v4l2_requestbuffers));
reqbuf.count = NB_BUFFER;
reqbuf.type = buf_type;
reqbuf.memory = V4L2_MEMORY_MMAP;
if (ioctl(videofd, VIDIOC_REQBUFS, &reqbuf) < 0) {
printf("Error: request buffer error=%d.\n",errno);
goto fatal;
}
//map buffers
for (unsigned int i = 0; i < reqbuf.count; i++) {
memset(&v4l2_buf, 0, sizeof(struct v4l2_buffer));
v4l2_buf.index = i;
v4l2_buf.type = buf_type;
v4l2_buf.memory = V4L2_MEMORY_MMAP;
if (v4l2_buf.type == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE) {
struct v4l2_plane buf_planes[format.fmt.pix_mp.num_planes];
v4l2_buf.m.planes = buf_planes;
v4l2_buf.length = format.fmt.pix_mp.num_planes;
}
if (ioctl(videofd, VIDIOC_QUERYBUF, &v4l2_buf) < 0) {
printf("Error: query buffer %d.\n", errno);
goto fatal;
}
if (v4l2_buf.type == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE) {
for (int j = 0; j < format.fmt.pix_mp.num_planes; j++) {
vbuffer[i * format.fmt.pix_mp.num_planes + j].start
= mmap(0, v4l2_buf.m.planes[j].length, PROT_READ,
MAP_SHARED, videofd, v4l2_buf.m.planes[j].m.mem_offset);
vbuffer[i * format.fmt.pix_mp.num_planes + j].length
= v4l2_buf.m.planes[j].length;
}
}else{//V4L2_BUF_TYPE_VIDEO_CAPTURE
vbuffer[i].start = mmap(0, v4l2_buf.length, PROT_READ, MAP_SHARED, videofd,v4l2_buf.m.offset);
vbuffer[i].length = v4l2_buf.length;
}
if (vbuffer[i].start == MAP_FAILED) {
printf("Error: mmap buffers.\n");
goto fatal;
}
}
//queue buffers
for (int i = 0; i < reqbuf.count; ++i) {
memset(&v4l2_buf, 0, sizeof(struct v4l2_buffer));
v4l2_buf.index = i;
v4l2_buf.type = buf_type;
v4l2_buf.memory = V4L2_MEMORY_MMAP;
if (v4l2_buf.type == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE) {
struct v4l2_plane buf_planes[format.fmt.pix_mp.num_planes];
v4l2_buf.m.planes = buf_planes;
v4l2_buf.length = format.fmt.pix_mp.num_planes;
}
if (ioctl(videofd, VIDIOC_QBUF, &v4l2_buf) < 0) {
printf("Error: queue buffers, ret:%d i:%d\n", errno, i);
goto fatal;
}
}
printf("Queue buf done.\n");
//stream on
if (ioctl(videofd, VIDIOC_STREAMON, &buf_type) < 0) {
printf("Error: streamon failed erron = %d.\n",errno);
goto fatal;
}
//open success
current_video_state = 1;
return 0;
fatal:
printf("init camera fial!\n");
current_video_state = 0;
c_CloseDevice(videofd);
return -1;
}
int c_GetBuffer(unsigned char* yuvBuffer, buffer *vbuffer, int videofd)
{
struct v4l2_buffer v4l2_buf;
int buf_index = -1;
int planes_num = format.fmt.pix_mp.num_planes;
memset(yuvBuffer, 0, SRC_WIDTH * SRC_HEIGHT * 3);
// dqbuf from video node
memset(&v4l2_buf, 0, sizeof(struct v4l2_buffer));
v4l2_buf.type = buf_type;
v4l2_buf.memory = V4L2_MEMORY_MMAP;
if (v4l2_buf.type == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE) {
struct v4l2_plane planes[planes_num];
v4l2_buf.m.planes = planes;
v4l2_buf.length = planes_num;
}
if (ioctl(videofd, VIDIOC_DQBUF, &v4l2_buf) < 0) {
printf("Error: dequeue buffer, errno %d\n", errno);
return errno;
}
buf_index = v4l2_buf.index;
if (v4l2_buf.type == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE) {
for(int i = 0;i < planes_num; i++){
memcpy(yuvBuffer, vbuffer[buf_index].start, format.fmt.pix_mp.plane_fmt[i].sizeimage);
}
}else{// V4L2_BUF_TYPE_VIDEO_CAPTURE
memcpy(yuvBuffer, vbuffer[buf_index].start, format.fmt.pix.sizeimage);
}
if (ioctl(videofd, VIDIOC_QBUF, &v4l2_buf) < 0) {
printf("Error: queue buffer.\n");
return errno;
}
return 0;
}
void c_CloseDevice(int videofd)
{
close(videofd);
}
void c_DeintDevice(int videofd, buffer *vbuffer)
{
struct v4l2_requestbuffers v4l2_rb;
// if(current_video_state != 1)
// return;
if(ioctl(videofd, VIDIOC_STREAMOFF, &buf_type) < 0 ){
printf("Error: stream close failed erron= %d\n", errno);
return;
}
for (int i = 0; i < NB_BUFFER; i++){
if((i < NB_BUFFER -1) && (vbuffer[i].length != vbuffer[i+1].length))
munmap (vbuffer[i].start, vbuffer[i+1].length);//first buffer.length maybe not current
else
munmap (vbuffer[i].start, vbuffer[i].length);
}
memset(&v4l2_rb, 0, sizeof(struct v4l2_requestbuffers));
v4l2_rb.count = 0;
v4l2_rb.type = buf_type;
v4l2_rb.memory = V4L2_MEMORY_MMAP;
if (ioctl(videofd, VIDIOC_REQBUFS, &v4l2_rb) < 0)
printf("Error: release buffer error=%d.\n",errno);
free(vbuffer);
vbuffer=NULL;
}
void c_NV12_TO_RGB24(unsigned char *data, unsigned char *rgb, int width, int height)
{
int index = 0;
unsigned char *ybase = data;
unsigned char *ubase = &data[width * height];
unsigned char Y, U, V;
int R, G, B;
for (int y = 0; y < height; y++) {
for (int x = 0; x < width; x++) {
//YYYYYYYYUVUV
Y = ybase[x + y * width];
U = ubase[y / 2 * width + (x / 2) * 2];
V = ubase[y / 2 * width + (x / 2) * 2 + 1];
R = Y + 1.4075 * (V - 128);
G = Y - 0.3455 * (U - 128) - 0.7169 * (V - 128);
B = Y + 1.779 * (U - 128);
if(R > 255)
R = 255;
else if(R < 0)
R = 0;
if(G > 255)
G = 255;
else if(G < 0)
G = 0;
if(B > 255)
B = 255;
else if(B < 0)
B = 0;
rgb[index++] = R; //R
rgb[index++] = G; //G
rgb[index++] = B; //B
}
}
}
void c_yuyv_to_rgb(unsigned char *yuyvdata, unsigned char *rgbdata, int w, int h)
{
int r1, g1, b1;
int r2, g2, b2;
for (int i = 0; i < w * h / 2; i++)
{
char data[4];
memcpy(data, yuyvdata + i * 4, 4);
// Y0 U0 Y1 V1-->[Y0 U0 V1] [Y1 U0 v1]
unsigned char Y0 = data[0];
unsigned char U0 = data[1];
unsigned char Y1 = data[2];
unsigned char V1 = data[3];
r1 = Y0 + 1.4075 * (V1-128); if(r1>255)r1=255; if(r1<0)r1=0;
g1 =Y0 - 0.3455 * (U0-128) - 0.7169 * (V1-128); if(g1>255)g1=255; if(g1<0)g1=0;
b1 = Y0 + 1.779 *(U0-128); if(b1>255)b1=255; if(b1<0)b1=0;
r2 = Y1+1.4075* (V1-128) ;if(r2>255)r2=255; if(r2<0)r2=0;
g2 = Y1- 0.3455 *(U0-128) - 0.7169*(V1-128); if(g2>255)g2=255;if(g2<0)g2=0;
b2 = Y1+ 1.779 * (U0-128);if(b2>255)b2=255;if(b2<0)b2=0;
rgbdata[i * 6 + 0] = r1;
rgbdata[i * 6 + 1] = g1;
rgbdata[i * 6 + 2] = b1;
rgbdata[i * 6 + 3] = r2;
rgbdata[i * 6 + 4] = g2;
rgbdata[i * 6 + 5] = b2;
}
}
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
#include <QDebug>
#include <QProcess>
#include <QStorageInfo>
#include <QDirIterator>
#include <libudev.h>
#include <QSocketNotifier>
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
, ui(new Ui::MainWindow)
{
ui->setupUi(this);
cameraThread1 = new CameraThread1;
//cameraThread1->camera1Dev = "/dev/video-camera0";
connect(cameraThread1, &CameraThread1::showCamera1, this, &MainWindow::displayCam1Buf);
cameraThread1->start();
}
void MainWindow::displayCam1Buf(unsigned char *buffer)
{
QImage img;
QPixmap pixmap;
img = QImage(buffer, 1280, 720, QImage::Format_RGB888);
QPixmap scaledPixmap = pixmap.fromImage(img);
ui->camera1->setPixmap(scaledPixmap);
// qDebug("<<<<<< %s %d\n",__FILE__,__LINE__);
}
MainWindow::~MainWindow()
{
delete ui;
}





![[已解决]ImportError: DLL load failed while importing win32api: 找不到指定的程序。](https://img-blog.csdnimg.cn/direct/97654980b9a3432f9107060518ccc3fd.png)