引言
机器人学习的背景和挑战


本文的研究重点

现有方法的局限性

本文的创新点
相关工作

事先准备
视觉目标条件策略
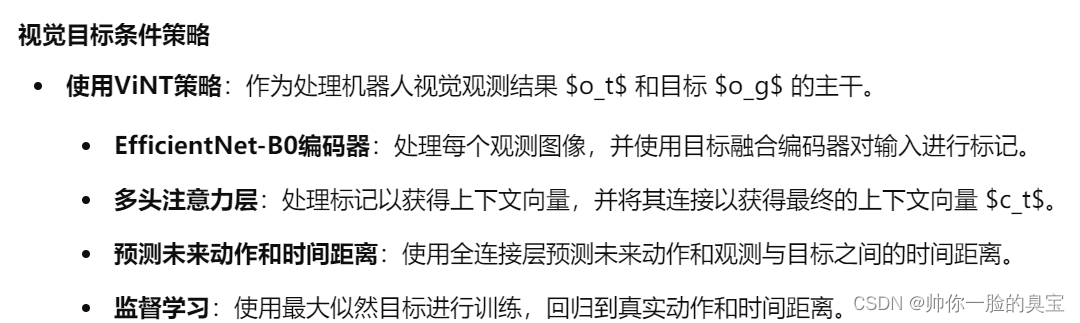
ViNT在目标条件导航中表现出最先进的性能,但它不能执行无方向探索,需要外部的子目标建议机制。Nomad扩展了Vint,同时支持目标条件导航和无方向导航。
使用拓扑图探索

在本文中,我们基于frontier探索,测试NoMaD的生成多样化子目标的能力和探索未知环境的能力。

方法

目标掩码

diffusion策略




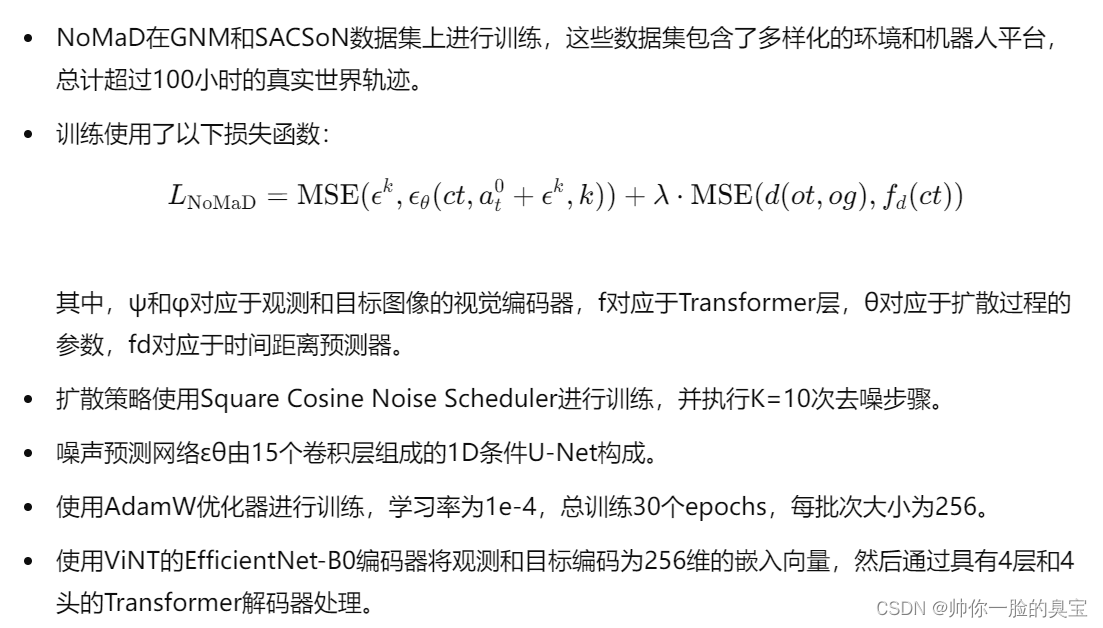
训练细节
实验结果
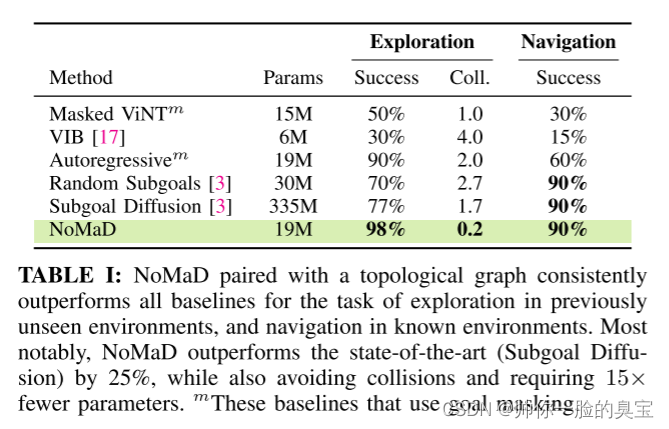
我们在6个不同的室内和室外环境中对Nomad进行了评估,并制定了我们的实验来回答以下问题:
Q1:NoMaD模型与现有研究的对比



点估计指的是预测动作时输出单一的确定之,而不是分布或者多种可能的结果。


分析跨基线的策略预测(参见图5),我们发现,虽然自回归策略表示(原则上)可以表示多峰分布,但预测在很大程度上是单峰的,相当于策略学习平均操作分布。子目标扩散基线倾向于很好地表示多个模式,但不是很健壮。Nomad始终如一地捕捉多峰分布,并在目标图像的条件下做出准确的预测。
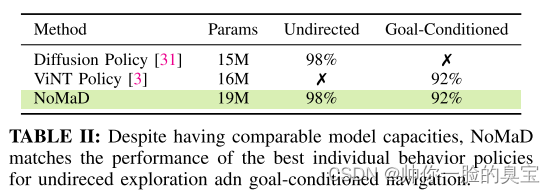
Q2:统一策略和单独的策略对比
Q3:视觉编码器和目标掩码的重要性

讨论





![【计算机网络】[第4章 网络层][自用]](https://img-blog.csdnimg.cn/direct/45e73d08c6614a32b73427f3ff22e7c7.png)