1主要内容
基于粒子群算法的电动汽车充电站和光伏最优选址和定容
关键词:选址定容 电动汽车 充电站位置
仿真平台:MATLAB
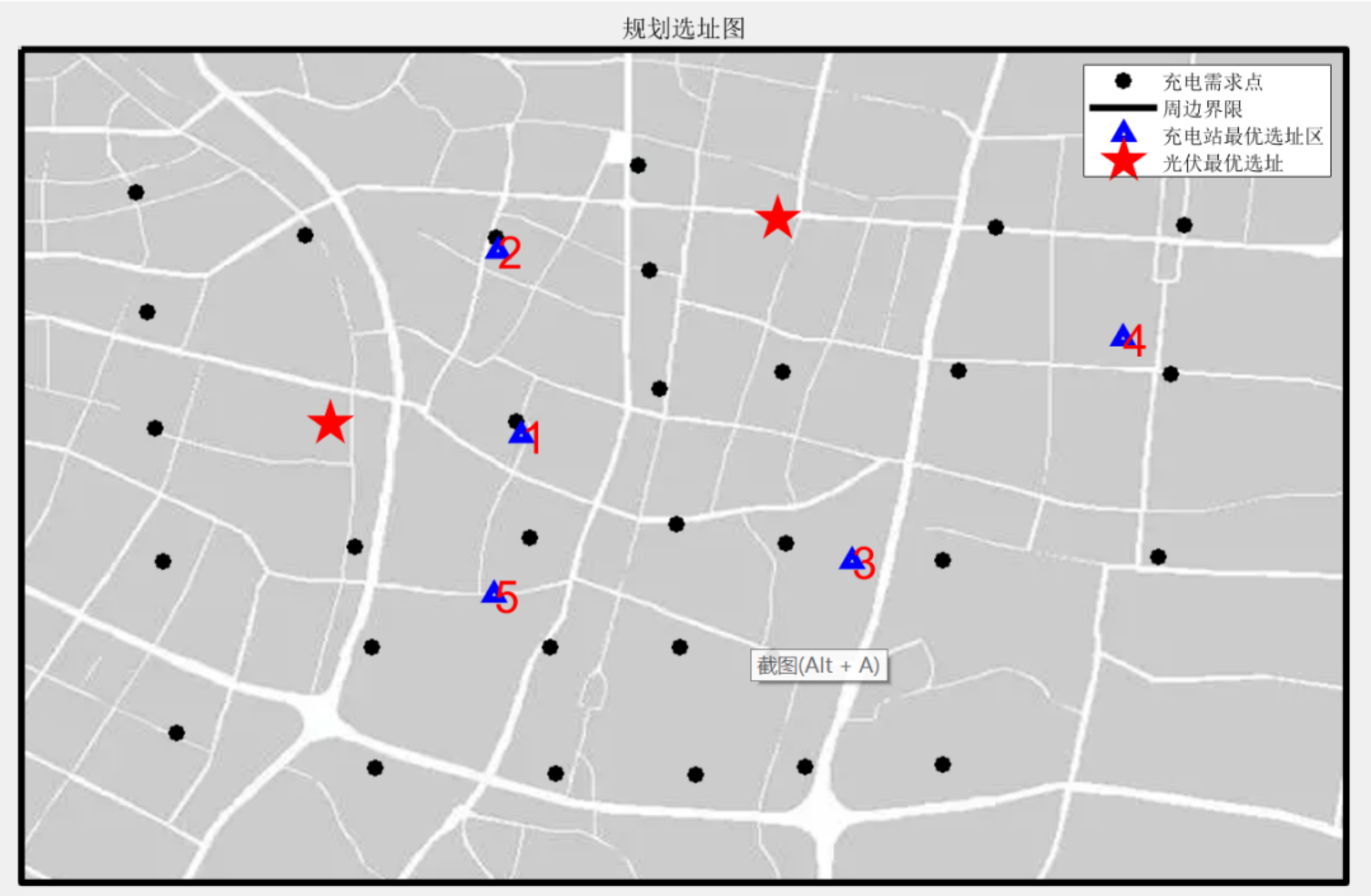
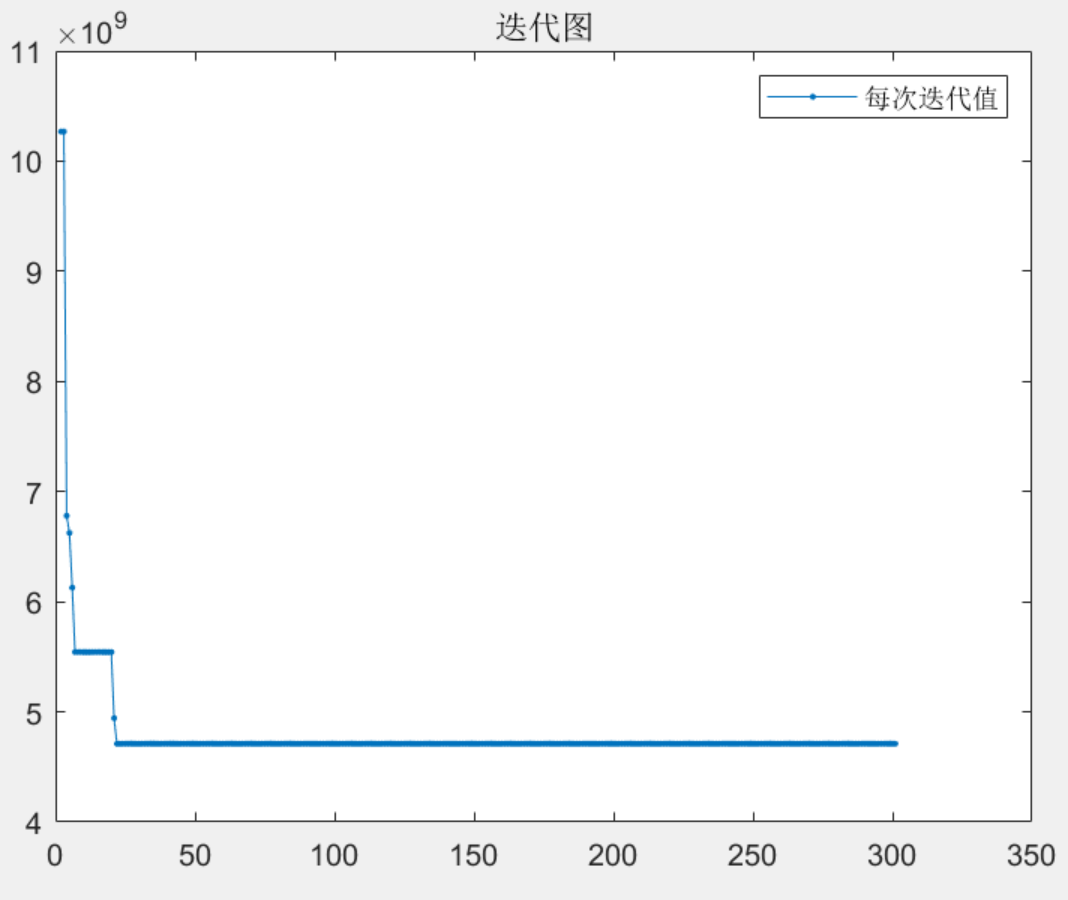
主要内容:代码主要做的是一个电动汽车充电站和分布式光伏的选址定容问题,提出了能够计及地理因素和服务半径的2步筛选法,以此来确定充电站的候选站址。以规划期内充电站的建设运行成本、充电途中耗时成本、网损费用以及考虑碳排放流成本之和最小为目标,考虑了相关的约束条件,构造了电动汽车充电站最优规划的数学模型,并采用粒子群算法快速求解!
可结合下图文献学习(注:程序备注不多,适合有编程经验同学)。
2程序结果
3部分程序
function [Fcost,CCS,fcs,ucs,NchI,Ep,CVT,CVTI,CDL,f]=VorCostCDEV(x,y,b,bcs,BL,X)
% x=X(1:Tn,pk);y=X(Tn+1:end,pk);b=bb;bcs=bcs(1,:);BL=BL;
%% 说明:计算电动汽车规划目标函数,即适应值
%输入
%x,y为充电站坐标;为外界交互变换参数。x和y保证是列矩阵。
%b为充电需求点坐标和充电需求,第1,2列为横坐标和纵坐标,第3列为充电需求,为固定参数;
%bcs为配送区域的集中充电站坐标,第1,2列为横、纵坐标。
%BL为图坐标与实际坐标的比例,为固定参数。
%输出
%Fcost为年社会成本
%CCS为建设运行成本
%fcs为固定建设成本
%ucs为运行管理成本,取fcs的0.1
%NchI为各充电站规模,即充电机数量
%Ep为个充电站服务的快充车辆数,即充电需求
%CVT为用户充电途中耗时成本
%CVTI为各充电站的用户充电途中耗时成本
Rz=(rr*(1+rr).^ms)./((1+rr).^ms-1);
mui=0.6;
dr=1;
m=1.5;
Ep=[];
vv=VoronoiArea([x,y],3);
[va,~]=size(vv);
vv(find(isnan(vv),2))=500*rand;
bax=b;
for k=1:length(x)
Ai=find(vv(:,3)==k);
xx=vv(Ai,1);
yy=vv(Ai,2);
kk=convhull(xx,yy);
in=inpolygon(bax(:,1),bax(:,2),xx(kk),yy(kk));
bax(in,4)=k;
end
f=zhiliupf33(X);
for i=1:length(x)
gb=bax(bax(:,4)==i,:);
Ep=[Ep;[sum(gb(:,3)),i]];
dtI=sqrt(((gb(:,1))-x(i)).^2+((gb(:,2))-y(i)).^2).*BL;
if all((lmd.*dtI>dmax)==0)==0
dp=1e5;
else
dp=0;
end
CVTI(i,:)=(1+dp).*365.*beta.*(sum(gb(:,3).*lmd.*dtI)./(v*1e3));
end
下载链接
![[大模型]ChatTTS Windows安装(CPU)](https://img-blog.csdnimg.cn/img_convert/77f21ec0e54ec2df8fa041df89af2a88.png)


![HarmongOS打包[保姆级]](https://img-blog.csdnimg.cn/direct/8cb20a9241e74194a92937d0a6e3083a.jpeg#pic_center)