1. 前言
前面我们介绍了用户态获取时间的接口clock_gettime,时钟的种类posix_clocks以及时钟源clocksource。那么我们思考这样一个问题,无论clock_gettime或者posix_clock定义的时间都是相对于某个起始点的时间,即相对于Linux Epoch的秒数,但是我们上一章节介绍的时钟源clocksource,它提供的read接口,我们看一下定义,它返回的是时钟源的cycle值,那么cycle和time是怎么对应的,内核是怎么通过clocksource来实现我们之前说的多种posix clock的,这就是本文要分析的内容timekeeper,同时我们再泛化到所有的硬件计时器,介绍timecounter和cyclecounter的概念。本文同样是在Linux时间子系统之(四):timekeeping文章的基础上,增加了一点个人的笔记。
2 Timekeeping
timekeeping模块是一个提供时间服务的基础模块。Linux内核提供各种time line,real time clock,monotonic clock、monotonic raw clock等,timekeeping模块就是负责跟踪、维护这些timeline的,并且向其他模块(timer相关模块、用户空间的时间服务等)提供服务,而timekeeping模块维护timeline的基础是基于clocksource模块和tick模块。通过tick模块的tick事件,可以周期性的更新time line,通过clocksource模块、可以获取tick之间更精准的时间信
2.1 Timekeeper数据结构
struct timekeeper数据结构如下:
struct timekeeper {
struct tk_read_base tkr_mono;
struct tk_read_base tkr_raw;
u64 xtime_sec;
unsigned long ktime_sec;
struct timespec64 wall_to_monotonic;
ktime_t offs_real;
ktime_t offs_boot;
ktime_t offs_tai;
s32 tai_offset;
unsigned int clock_was_set_seq;
u8 cs_was_changed_seq;
ktime_t next_leap_ktime;
u64 raw_sec;
struct timespec64 monotonic_to_boot;
/* The following members are for timekeeping internal use */
u64 cycle_interval;
u64 xtime_interval;
s64 xtime_remainder;
u64 raw_interval;
/* The ntp_tick_length() value currently being used.
* This cached copy ensures we consistently apply the tick
* length for an entire tick, as ntp_tick_length may change
* mid-tick, and we don't want to apply that new value to
* the tick in progress.
*/
u64 ntp_tick;
/* Difference between accumulated time and NTP time in ntp
* shifted nano seconds. */
s64 ntp_error;
u32 ntp_error_shift;
u32 ntp_err_mult;
/* Flag used to avoid updating NTP twice with same second */
u32 skip_second_overflow;
#ifdef CONFIG_DEBUG_TIMEKEEPING
long last_warning;
/*
* These simple flag variables are managed
* without locks, which is racy, but they are
* ok since we don't really care about being
* super precise about how many events were
* seen, just that a problem was observed.
*/
int underflow_seen;
int overflow_seen;
#endif
};tkr_mono:记录单调时间的结构体。
tkr_raw:记录原始单调时间的结构体。
xtime_sec:实时时间当前的秒数。
ktime_sec:单调时间当前的秒数。
wall_to_monotonic:实时时间和单调时间之间的差值。
offs_real:单调时间和实时时间之间的差值,offs_real=-wall_to_monotonic。
offs_boot:单调时间和启动时间之间的差值。
offs_tai:单调时间和TAI时间之间的差值,offs_tai=offs_real+tai_offset。
tai_offset:实时时间和TAI时间之间的差值。
clock_was_set_seq:表示时钟被设置的序数。
cs_was_changed_seq:表示时钟源更换的序数。
next_leap_ktime:下一次需要闰秒(跳变秒)的时间。“闰秒”就是1分钟有61秒, “跳秒”都安排在6月30日,或是12月31日的最后一瞬间。地球自转并非十分均匀,准确的说自转是在不断地在变慢的。每当地球自转变化引起的时间误差积累到与原子钟相关接近1秒时,就要人为地把时钟增加或减少1秒,从而使两者重新协调一致。这增加或减少的1秒称为“跳秒”。若是增加的,就是“正跳秒”(拨慢1秒);若是减少的就是“负跳秒”(拨快1秒),不过负跳秒至今还没有发生过。这样,每逢正跳秒那1分钟自然就是61秒了,正因为这1分钟多1秒,所以又叫“闰秒”。
raw_sec:原始单调时间当前的秒数。
monotonic_to_boot:单调时间和启动时间之间的差值。
cycle_interval:表示一次NTP周期包含多少个时钟周期。
xtime_interval:表示一个NTP周期包含多少纳秒,不过这个值是位移过后的,也就是实际的纳秒数向左位移了shift位,而且这个值会根据NTP层的状况做出调整。
xtime_remainder:表示从周期数转换成纳秒数时候的精度损失,后面分析代码的时候会解释。
raw_interval:也表示了一个NTP周期包含多少纳秒,也是位移过后的,不过这个值不会根据NTP的状况做出调整,一旦设置好后就不会变了。在初始状态下,xtime_interval和raw_interval的值是完全一样的。
ntp_tick:记录了NTP周期的纳秒数,这个值也是位移过后的,但其位移的位数不是有时钟源设备决定的,而是一个固定的值。
ntp_error:NTP时间和当前实时时间之间的差值,如果ntp_error大于0,表示当前系统的实时时间慢于NTP时间,相反如果小于0则表示快于。
ntp_error_shift:存放了NTP的shift和时钟源设备shift之间的差值。NTP层也需要对纳秒数做shift的操作,其值由宏NTP_SCALE_SHIFT定义,现在被定义成了32位。但是时钟源设备的shift值是根据条件计算出来的,所以在两层之间虽然都会shift,但位数是不同的。如果需要转换的话,必须记录下来它们之间的差值。
ntp_err_mult:如果ntp_error大于0,则为1,否则都是0。
skip_second_overflow:处理闰秒的时候是否需要跳过这一秒。
其中,tk_read_base的数据结构如下:
struct tk_read_base {
struct clocksource *clock;
u64 mask;
u64 cycle_last;
u32 mult;
u32 shift;
u64 xtime_nsec;
ktime_t base;
u64 base_real;
};clock:指向对应底层时钟源设备结构体的指针。
cycle_last:记录了最近一次时钟源的周期计数。
mask、mult和shift:对应底层时钟源设备的mask、mult和shift的值,用于将时钟周期数和纳秒数之间互相转换。
xtime_nsec:实时时间当前的纳秒数,这个值也是移位过后的,也就是实际的纳秒数向左移动了shift位。累积起来会进位。
base:单调时间的基准时间。
base_real:实时时间的基准时间,base_real=base+offs_real。
以上内容,参考Linux时间子系统之时间维护层
2.1 全局变量timekeeper
timekeeper维护了系统的所有的clock(这句话并不准确,如同posxi clocks那篇文章所说,timekeeper维护了系统中所有的与系统时间相关的clock,这也正是为什么会存在timecounter,我们稍后再讲)。如下:
static struct {
seqcount_raw_spinlock_t seq;
struct timekeeper timekeeper;
} tk_core ____cacheline_aligned = {
.seq = SEQCNT_RAW_SPINLOCK_ZERO(tk_core.seq, &timekeeper_lock),
}; tk_core就是保存内核时间信息的变量。____cacheline_aligned宏定义指示编译器对应于L1缓存行开头的地址处实例化一个结构体或变量(请参考其他文献,本文不深入讨论)。
2.2 初始化
timekeeping初始化的代码位于timekeeping_init函数中,在系统初始化的时候(start_kernel)会调用该函数进行timekeeping的初始化。
timekeeping模块中的若干个system clock,数据保存在ram中,一旦断电,数据就丢失了。因此,在系加电启动后,会从persistent clock中中取出当前时间值(例如RTC,RTC有battery供电,因此系统断电也可以保存数据),根据情况初始化各种system clock。如下:
void __init timekeeping_init(void)
{
struct timespec64 wall_time, boot_offset, wall_to_mono;
struct timekeeper *tk = &tk_core.timekeeper;
struct clocksource *clock;
unsigned long flags;
read_persistent_wall_and_boot_offset(&wall_time, &boot_offset);
if (timespec64_valid_settod(&wall_time) &&
timespec64_to_ns(&wall_time) > 0) {
persistent_clock_exists = true;
} else if (timespec64_to_ns(&wall_time) != 0) {
pr_warn("Persistent clock returned invalid value");
wall_time = (struct timespec64){0};
}
if (timespec64_compare(&wall_time, &boot_offset) < 0)
boot_offset = (struct timespec64){0};
/*
* We want set wall_to_mono, so the following is true:
* wall time + wall_to_mono = boot time
*/
wall_to_mono = timespec64_sub(boot_offset, wall_time);
raw_spin_lock_irqsave(&timekeeper_lock, flags);
write_seqcount_begin(&tk_core.seq);
ntp_init();
clock = clocksource_default_clock();
if (clock->enable)
clock->enable(clock);
tk_setup_internals(tk, clock);
tk_set_xtime(tk, &wall_time);
tk->raw_sec = 0;
tk_set_wall_to_mono(tk, wall_to_mono);
timekeeping_update(tk, TK_MIRROR | TK_CLOCK_WAS_SET);
write_seqcount_end(&tk_core.seq);
raw_spin_unlock_irqrestore(&timekeeper_lock, flags);
}read_persistent_wall_and_boot_offset中调用了read_persistent_clock64,这是和architecture相关的函数。接下来的代码都是判断获取到的时间是否合法。只有tegra和omap平台实现了read_persistent_clock函数.其他ARM平台打开CONFIG_RTC_HCTOSYS这个内核配置项,打开该配置后,driver/rtc/hctosys.c将会编译到系统中,由rtc_hctosys函数通过do_settimeofday在系统初始化时完成xtime变量的初始化:
clocksource_default_clock和tk_setup_internals为timekeeping模块设置默认的clocksource。在timekeeping初始化的时候,很难选择一个最好的clock source,因为很有可能最好的那个还没有初始化呢。因此,这里的策略就是采用一个在timekeeping初始化时一定是ready的clock source,也就是基于jiffies 的那个clocksource。clocksource_default_clock定义在kernel/time/jiffies.c,是一个weak symble,如果你愿意也可以重新定义clocksource_default_clock这个函数。不过,要保证在timekeeping初始化的时候是ready的。
接下来则是初始化real time clock,monotonic clock和monotonic raw clock
2.3 获取和设定系统时间
获取monotonic clock的时间值:ktime_get和ktime_get_ts64
获取real time clock的时间值:ktime_get_real和ktime_get_real_ts64
获取boot clock的时间值:ktime_get_boottime和ktime_get_boottime_ts64
一般而言,timekeeping模块是在tick到来的时候更新各种系统时钟的时间值,ktime_get调用很有可能发生在两次tick之间,这时候,仅仅依靠当前系统时钟的值精度就不甚理想了,毕竟那个时间值是per tick更新的。因此,为了获得高精度,ns值的获取是通过timekeeping_get_ns完成的,该函数获取了real time clock的当前时刻的纳秒值,而这是通过上一次的tick时候的real time clock的时间值(xtime_nsec)加上当前时刻到上一次tick之间的delta时间值计算得到的。
ktime_get_ts的概念和ktime_get是一样的,只不过返回的时间值格式不一样而已。
2.4 更新时钟
timekeeping_update函数用来更新时间维护层的数据。该函数的第二个参数是action动作,目前共定义了下面三个值:
#define TK_CLEAR_NTP (1 << 0)
#define TK_MIRROR (1 << 1)
#define TK_CLOCK_WAS_SET (1 << 2)- TK_CLEAR_NTP:是否需要清除NTP层的状态信息。
- TK_MIRROR:是否需要复制到影子timekeeper结构体中。
- TK_CLOCK_WAS_SET:是否需要递增clock_was_set_seq变量,该变量在每次设置时钟后都需要加一。
3 cyclecounter和clockcounter
3.1 为什么会有timecounter和cyclecounter
在内核的driver中,我们可能有这样的需求:获取drive中的A事件和B事件之间的时间值或者一个event stream过程中,各个event的时刻值。这里,driver不关心绝对的时间点,关心的是事件之间的时长。为了应对这个需求,clock source模块提供了timecounter和cyclecounter。
实际上上面的话并不准确,我们这么想,clocksource和timekeeper分别对应了系统时钟的时钟源和时间管理软件,但是对于非系统时钟的其他时钟源,如何获取他们的硬件counter和时间呢?内核用timecounter和cyclecounter就可以统一除系统时钟以外的所有的硬件时钟的需求。
内核中使用struct cyclecounter 来抽象一个free running的counter,从0开始,不断累加。由于counter的bit数目有限,因此,某个时间后,counter会wraparound,从0继续开始。该数据结构定义如下:
struct cyclecounter {
u64 (*read)(const struct cyclecounter *cc);
u64 mask;
u32 mult;
u32 shift;
};
每个cycle counter的counter value都是针对clock计数的,因此,通过read获取的counter value是基于cycle的,而cycle又是和输入频率有关。不过,对于其他driver而言,cycle数据是没有意义的,最好统一使用纳秒这样的单位,因此在
struct cyclecounter 中就有了mult和shift这两个成员了,这和clocksource的概念是不是基本一致。
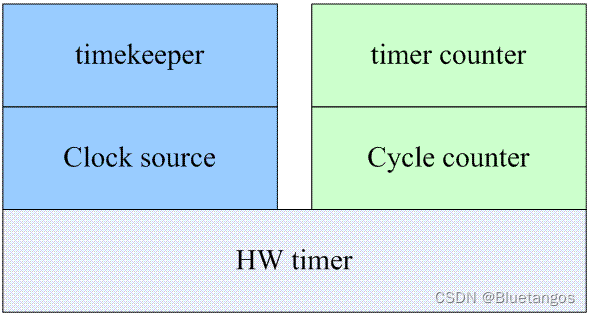
实际上,最开始的时候,内核的确是只有clock source模块,它位于timekeeping模块和硬件之间。但是,其他内核模块也有访问free running counter的需要,这时候,内核开发人员创建了cycle counter和timer counter这样的概念,虽然代码有一点重复,但是这样不会触及clock source代码的改动。
timecounter是构架在cycle counter之上,使用纳秒这样的时间单位而不是cycle数目,这样的设计会让用户接口变得更加友好,毕竟大家还是喜欢直观的纳秒值。timecounter的定义如下:
struct timecounter {
const struct cyclecounter *cc;
u64 cycle_last;
u64 nsec;
u64 mask;
u64 frac;
};3.2 如何使用timecounter
首先需要初始化,注册timecounter
void timecounter_init(struct timecounter *tc,
const struct cyclecounter *cc,
u64 start_tstamp)
{
tc->cc = cc;
tc->cycle_last = cc->read(cc);
tc->nsec = start_tstamp;
tc->mask = (1ULL << cc->shift) - 1;
tc->frac = 0;
}读取timecounter:
u64 timecounter_read(struct timecounter *tc)
{
u64 nsec;
/* increment time by nanoseconds since last call */
nsec = timecounter_read_delta(tc);
nsec += tc->nsec;
tc->nsec = nsec;
return nsec;
}可能很多人认为,除了系统时间,我们还需要读别的什么时间吗?提供这样的接口的意义在哪里呢?在后面PTP时钟同步章节会有分析。不过说到这个,有意思的是硬件厂家的硬件时钟并不总是提供cycle counter的功能,如果硬件厂家提供的接口能读取到的直接是time,而不是cycle,那不是很尴尬吗?实际上我确实遇到过,后面再说。



![[大模型]XVERSE-MoE-A4.2B Transformers 部署调用](https://img-blog.csdnimg.cn/direct/0ce237e542bd4989bd1e903d7efa40c3.png#pic_center)