智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》
目录
智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》
1. 前言
2.车牌号码说明
3.车牌数据集CCPD
(1)车牌数据集CCPD说明
(2)车牌数据集CCPD标注格式
(3)车牌数据集CCPD可视化效果(Python)
4.CCPD车牌数据集下载
5.车牌检测和识别项目推荐
1. 前言
这是项目《智能驾驶 车牌检测和识别》系列之《CCPD车牌数据集》;我们将介绍一个免费开源的CCPD车牌数据集,总数据量约35W左右,可用于车牌检测和识别模型算法开发;

【尊重原创,转载请注明出处】 :https://blog.csdn.net/guyuealian/article/details/128704181
更多项目《智能驾驶 车牌检测和识别》系列文章请参考:
- 智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》:https://blog.csdn.net/guyuealian/article/details/128704181
- 智能驾驶 车牌检测和识别(二)《YOLOv5实现车牌检测(含车牌检测数据集和训练代码)》:https://blog.csdn.net/guyuealian/article/details/128704068
- 智能驾驶 车牌检测和识别(三)《CRNN和LPRNet实现车牌识别(含车牌识别数据集和训练代码)》:https://blog.csdn.net/guyuealian/article/details/128704209
- 智能驾驶 车牌检测和识别(四)《Android实现车牌检测和识别(可实时车牌识别)》:https://blog.csdn.net/guyuealian/article/details/128704242
- 智能驾驶 车牌检测和识别(五)《C++实现车牌检测和识别(可实时车牌识别)》:https://blog.csdn.net/guyuealian/article/details/128704276
- 智能驾驶 红绿灯检测(一)《红绿灯(交通信号灯)数据集》:https://blog.csdn.net/guyuealian/article/details/128222850
- 智能驾驶 红绿灯检测(二)《YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)》:https://blog.csdn.net/guyuealian/article/details/128240198
- 智能驾驶 红绿灯检测(三)《Android实现红绿灯检测(含Android源码 可实时运行)》:https://blog.csdn.net/guyuealian/article/details/128240334
-
智能驾驶 车辆检测(一)《UA-DETRAC BITVehicle车辆检测数据集》:https://blog.csdn.net/guyuealian/article/details/127907325
-
智能驾驶 车辆检测(二)《YOLOv5实现车辆检测(含车辆检测数据集+训练代码)》:https://blog.csdn.net/guyuealian/article/details/128099672
-
智能驾驶 车辆检测(三)《Android实现车辆检测(含Android源码 可实时运行)》:https://blog.csdn.net/guyuealian/article/details/128190532
2.车牌号码说明
- 车牌第一位是汉字:代表该车户口所在的省级行政区,为各(省、直辖市、自治区)的简称,比如:北京就是京,上海就是沪,湖南就是湘,重庆就是渝,山东就是鲁,江西就是赣,福建就是闽.......;
- 车牌第二位是英文字母:代表该车户口所在的地级行政区,一般为各地级市、地区、自治州、盟字母代码,一般按省级车管所以各地级行政区状况分划排名:(字母“A”为省会、首府或直辖市中心城区的代码,其后字母排名不分先后);
- 另在编排地级行政区英文字母代码时,跳过I和O,O往往被用作警车或机关单位(军队、武警中的字母O等与此无关)。
- 省份:[“皖”, “沪”, “津”, “渝”, “冀”, “晋”, “蒙”, “辽”, “吉”, “黑”, “苏”, “浙”, “京”, “闽”, “赣”, “鲁”, “豫”, “鄂”, “湘”, “粤”, “桂”, “琼”, “川”, “贵”, “云”, “藏”, “陕”, “甘”, “青”, “宁”, “新”]
- 地市:[‘A’, ‘B’, ‘C’, ‘D’, ‘E’, ‘F’, ‘G’, ‘H’, ‘J’, ‘K’, ‘L’, ‘M’, ‘N’, ‘P’, ‘Q’, ‘R’, ‘S’, ‘T’, ‘U’, ‘V’, ‘W’,‘X’, ‘Y’, ‘Z’]
- 车牌字典:[‘A’, ‘B’, ‘C’, ‘D’, ‘E’, ‘F’, ‘G’, ‘H’, ‘J’, ‘K’, ‘L’, ‘M’, ‘N’, ‘P’, ‘Q’, ‘R’, ‘S’, ‘T’, ‘U’, ‘V’, ‘W’, ‘X’,‘Y’, ‘Z’, ‘0’, ‘1’, ‘2’, ‘3’, ‘4’, ‘5’, ‘6’, ‘7’, ‘8’, ‘9’]
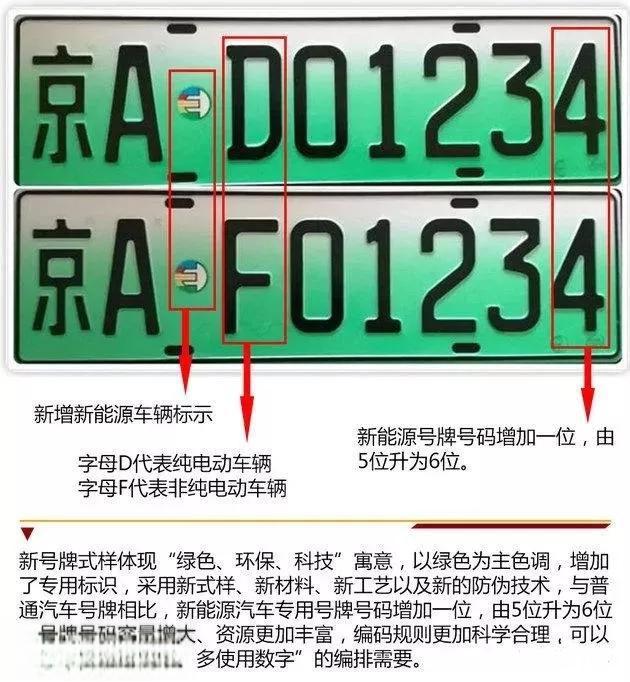
绿牌和蓝牌区别如下:
- 颜色区别:小型新能源车牌采用“渐变绿”的配色,大型新能源车牌采用“黄绿双拼色”,绿牌的字体颜色为黑色;而传统燃油车蓝牌则采用“纯蓝色”设计,字体颜色为白色;
- 号码编排:普通蓝牌共有7位字符;新能源车牌有8位字符;新能源绿牌的号码共有6位数,其中小型新能源汽车牌照的字母设计在第一位,大型新能源汽车牌照的字母设计在最后一位。其中车牌首字母为“D/A/B/C/E”的,代表“纯电动车”;首字母为“F/G/H/J/K”的,代表“非纯电动汽车”。而普通燃油车蓝牌的号码只有5位数,首字母或数字一般不代表任何含义,只有部分地区会给营运类车型划分特定字母。

参考资料:
绿牌和蓝牌区别是什么?电动车上蓝牌好还是绿牌好-无敌电动
新能源电动汽车牌照和普通牌照区别介绍-有驾
3.车牌数据集CCPD
(1)车牌数据集CCPD说明
CCPD (Chinese City Parking Dataset, ECCV)是中国城市车牌数据集,共有两个:CCPD2019和CCPD2020,前者主要是蓝牌数据,约34W;后者主要是新能源绿牌数据,约1万;
CCPD官方原始数据集下载地址:https://github.com/detectRecog/CCPD
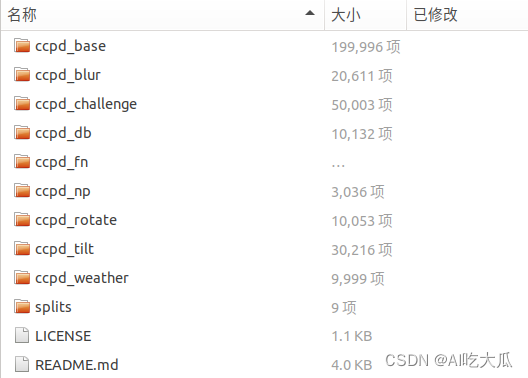
CCPD2019数据集包含将近30万张图片、图片尺寸为720x1160x3,共包含8种类型图片,每种类型、数量及类型说明如下表:
| 类型 | 图片数 | 说明 |
|---|---|---|
| ccpd_base | 199998 | 正常车牌 |
| ccpd_challenge | 10006 | 比较有挑战的车牌 |
| ccpd_db | 20001 | 光线较暗或较亮车牌 |
| ccpd_fn | 19999 | 距离摄像头较远或较近 |
| ccpd_np | 3036 | 没上牌的新车 |
| ccpd_rotate | 9998 | 水平倾斜20-50度,垂直倾斜-10-10度 |
| ccpd_tilt | 10000 | 水平倾斜15-45度,垂直倾斜-15-45度 |
| ccpd_weather | 9999 | 雨天、雪天或大雾的车牌 |
| 总共283037张车牌图像 |
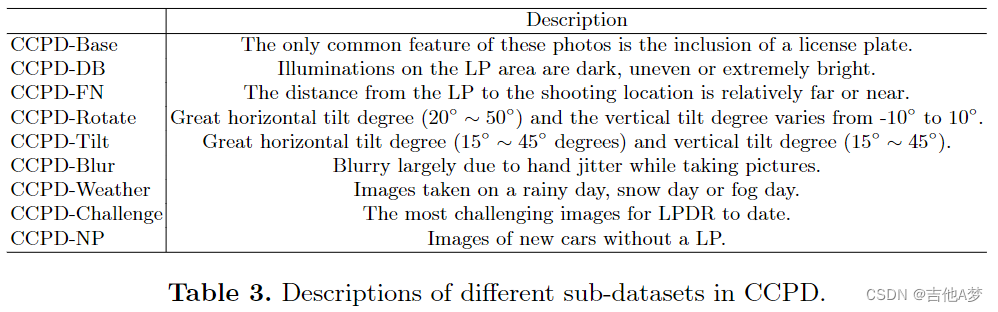

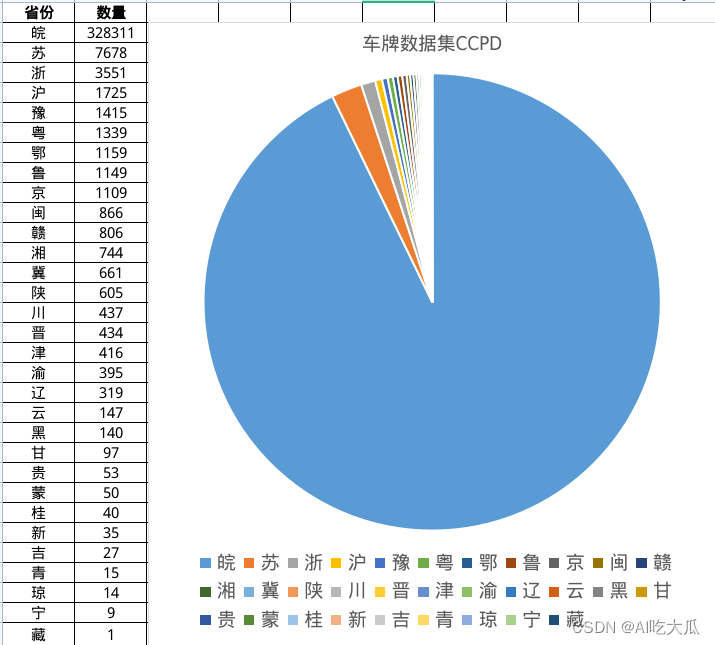
CCPD2019车牌数据集拍摄的车牌照片的环境复杂多变,包括了倾斜、模糊、雨天、雪天等多个场景的数据,并且大部分图片有且仅含有一个车牌;由于采集人员主要在安徽省城市的停车场进行采集,导致大部分数据都是含【皖】的车牌图片,而其他省份的车牌比较少,而一些特殊车牌的数据就几乎没有,比如【挂使领民航危险品】这些车牌几乎没有。下表给出CCPD数据各个省份的车牌数据统计:
(2)车牌数据集CCPD标注格式
CCPD车牌数据集标注了车牌四个角点,车牌水平和垂直角度以及车牌号码等信息,并以图片文件名的方式进行命名,如图片【025-95_113-154&383_386&473-386&473_177&454_154&383_363&402-0_0_22_27_27_33_16-37-15.jpg】,其文件名的含义如下:
- 025:车牌区域占整个画面的比例;
- 95_113: 车牌水平和垂直角度, 水平95°, 竖直113°
- 154&383_386&473:标注框左上、右下坐标,左上(154, 383), 右下(386, 473)
- 86&473_177&454_154&383_363&402:标注框四个角点坐标,顺序为右下、左下、左上、右上
- 0_0_22_27_27_33_16:车牌号码映射关系如下: 第一个0为省份 对应省份字典provinces中的’皖’,;第二个0是该车所在地的地市一级代码,对应地市一级代码字典alphabets的’A’;后5位为字母和文字, 查看车牌号ads字典,如22为Y,27为3,33为9,16为S,最终车牌号码为皖AY339S
(3)车牌数据集CCPD可视化效果(Python)
下面给个解析图片的python脚本,用户通过调用parser_annotations(image_file)函数,即可返回标注信息,并可视化车牌标注的结果
代码需要用到pybaseutils工具,请使用pip安装即可:pip install pybaseutils
# -*-coding: utf-8 -*-
"""
@Author : PKing
@E-mail : 390737991@qq.com
@Date : 2022-11-29 18:49:56
"""
import os
import cv2
import numpy as np
from tqdm import tqdm
from pybaseutils import file_utils, image_utils
def get_plate_licenses(plate):
"""
普通蓝牌共有7位字符;新能源车牌有8位字符: https://baike.baidu.com/item/%E8%BD%A6%E7%89%8C/8347320?fr=aladdin
《新能源电动汽车牌照和普通牌照区别介绍》https://www.yoojia.com/ask/4-11906976349117851507.html
新能源汽车车牌可分为三部分:省份简称(1位汉字)十地方行政区代号(1位字母)十序号(6位)
字母“D”代表纯电动汽车;
字母“F”代表非纯电动汽车(包括插电式混合动力和燃料电池汽车等)。
:param plate:
:return:
"""
provinces = ["皖", "沪", "津", "渝", "冀", "晋", "蒙", "辽", "吉", "黑", "苏", "浙", "京", "闽", "赣", "鲁", "豫", "鄂", "湘", "粤",
"桂", "琼", "川", "贵", "云", "藏", "陕", "甘", "青", "宁", "新", "警", "学", "O"]
alphabets = ['A', 'B', 'C', 'D', 'E', 'F', 'G', 'H', 'J', 'K', 'L', 'M', 'N', 'P', 'Q', 'R', 'S', 'T', 'U', 'V',
'W', 'X', 'Y', 'Z', 'O']
ads = ['A', 'B', 'C', 'D', 'E', 'F', 'G', 'H', 'J', 'K', 'L', 'M', 'N', 'P', 'Q', 'R', 'S', 'T', 'U', 'V', 'W', 'X',
'Y', 'Z', '0', '1', '2', '3', '4', '5', '6', '7', '8', '9', 'O']
result = [provinces[int(plate[0])], alphabets[int(plate[1])]]
result += [ads[int(p)] for p in plate[2:]]
result = "".join(result)
# 新能源车牌的要求,如果不是新能源车牌可以删掉这个if
# if result[2] != 'D' and result[2] != 'F' \
# and result[-1] != 'D' and result[-1] != 'F':
# print(plate)
# print("Error label, Please check!")
print(plate, result)
return result
def parser_annotations(image_file):
"""
:param image_file: 图片路径
:return: 返回标注信息info
"""
filename = os.path.basename(image_file)
try:
annotations = filename.split("-")
rate = annotations[0] # 车牌区域占整个画面的比例;
angle = annotations[1].split("_") # 车牌水平和垂直角度, 水平95°, 竖直113°
box = annotations[2].replace("&", "_").split("_") # 标注框左上、右下坐标,左上(154, 383), 右下(386, 473)
point = annotations[3].replace("&", "_").split("_") # 标注框四个角点坐标,顺序为右下、左下、左上、右上
plate = annotations[4].split("_") # licenses 标注框四个角点坐标,顺序为右下、左下、左上、右上
plate = get_plate_licenses(plate)
box = [int(b) for b in box]
point = [int(b) for b in point]
point = np.asarray(point).reshape(-1, 2)
bboxes = [box]
angles = [angle]
points = [point]
plates = [plate]
labels = ["plate"] * len(bboxes)
except Exception as e:
bboxes = []
points = []
labels = []
plates = []
angles = []
info = {"filename": filename, "bboxes": bboxes, "points": points,
"labels": labels, "plates": plates, "angles": angles}
return info
def save_plate_licenses(image, bboxes, plates, out_dir, name=""):
crops = image_utils.get_bboxes_crop(image, bboxes)
for i in range(len(crops)):
label = plates[i]
# image_id = file_utils.get_time(format="p")
file = os.path.join(out_dir, "{}_{}_{:0=3d}.jpg".format(label, name, i))
file_utils.create_file_path(file)
cv2.imwrite(file, crops[i])
def converter_CCPD2voc(image_dir, vis=True):
"""
将CCPD数据集转换为VOC数据格式(xmin,ymin,xmax,ymax)
:param image_dir: BITVehicle数据集图片(*.jpg)根目录
:param annot_file: BITVehicle数据集标注文件VehicleInfo.mat
:param out_voc: 输出VOC格式数据集目录
:param vis: 是否可视化效果
"""
print("image_dir :{}".format(image_dir))
class_set = []
image_list = file_utils.get_images_list(image_dir)
for i, image_file in enumerate(tqdm(image_list)):
info = parser_annotations(image_file)
labels = info["labels"]
bboxes = info["bboxes"]
points = info["points"]
plates = info["plates"]
angles = info["angles"]
image_name = info["filename"]
print("i={},plates:{},angles(水平,垂直角度):{}".format(os.path.basename(image_file), plates, angles))
if len(labels) == 0:
continue
image_name = os.path.basename(image_name)
img_postfix = image_name.split(".")[-1]
image_id = image_name[:-len(img_postfix) - 1]
class_set = labels + class_set
class_set = list(set(class_set))
if not os.path.exists(image_file):
print("not exist:{}".format(image_file))
continue
image = cv2.imread(image_file)
if vis:
image = image_utils.draw_image_bboxes_text(image, bboxes, plates, color=(255, 0, 0), thickness=3,
fontScale=1.2, drawType="chinese")
# image = image_utils.draw_image_points_lines(image, points=points[0], line_color=(0, 0, 255))
image_utils.cv_show_image("det", image, use_rgb=False, delay=0)
print("class_set:{}".format(class_set))
if __name__ == "__main__":
image_dir = "path/to/dataset/CCPD2020/ccpd_green/train"
converter_CCPD2voc(image_dir, vis=True)
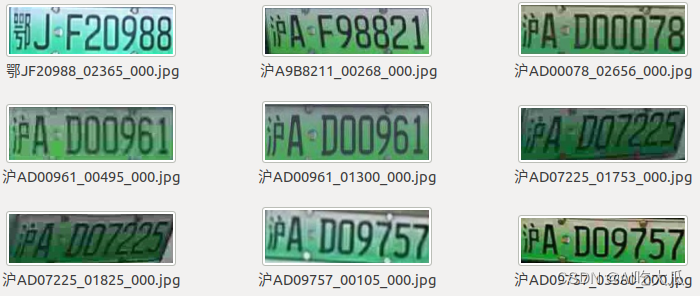
可视化CCPD车牌数据集的结果:
 |  |
 |  |
4.CCPD车牌数据集下载
CCPD车牌检测数据集 :CCPD2019+CCPD2020+CCPD2019-voc和CCPD2020-voc
数据集下载地址:智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》
CCPD2019:官方原始数据,主要是蓝牌数据,约34W;
CCPD2020:官方原始数据,主要是新能源绿牌数据,约1万
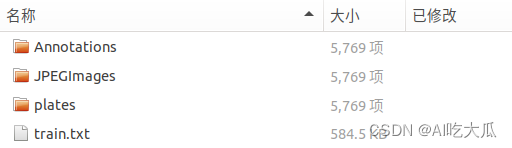
CCPD2019-voc:将数据集CCPD2019转换为VOC数据格式(数据在Annotations,JPEGImages文件夹),可直接用于目标检测模型训练
CCPD2020-voc:将数据集CCPD2020转换为VOC数据格式(数据在Annotations,JPEGImages文件夹),可直接用于目标检测模型训练
为了方便后续训练车牌识别模型,数据集提供已经裁剪好的车牌图片,并放在plates文件夹
5.车牌检测和识别项目推荐
- 智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》:https://blog.csdn.net/guyuealian/article/details/128704181
- 智能驾驶 车牌检测和识别(二)《YOLOv5实现车牌检测(含车牌检测数据集和训练代码)》:https://blog.csdn.net/guyuealian/article/details/128704068
- 智能驾驶 车牌检测和识别(三)《CRNN和LPRNet实现车牌识别(含车牌识别数据集和训练代码)》:https://blog.csdn.net/guyuealian/article/details/128704209
- 智能驾驶 车牌检测和识别(四)《Android实现车牌检测和识别(可实时车牌识别)》:https://blog.csdn.net/guyuealian/article/details/128704242
- 智能驾驶 车牌检测和识别(五)《C++实现车牌检测和识别(可实时车牌识别)》:https://blog.csdn.net/guyuealian/article/details/128704276