资料:上手教程 | LUCKFOX WIKI 以及SDK内的文档资料
开发板型号:RV1106 LuckFox Pico Max
烧录系统: Ubuntu
虚拟机系统:Ubuntu 20.04&&Ubuntu22.04
PC系统:win11
占用空间:大概15G
本文主要记录幸狐RV1106 LuckFox Pico Max开发板的配置过程,记录一些遇到的问题。
PS:注意自己的剩余空间,我剩余空间未注意导致虚拟机寄了,所以换了22.04,就在我重装的这一天官方更新了。。。解决了一些bug比如ubuntu这个文件夹没有。20.04似乎也能用,可以试试。

一、镜像烧录与登录
1 驱动安装与镜像下载
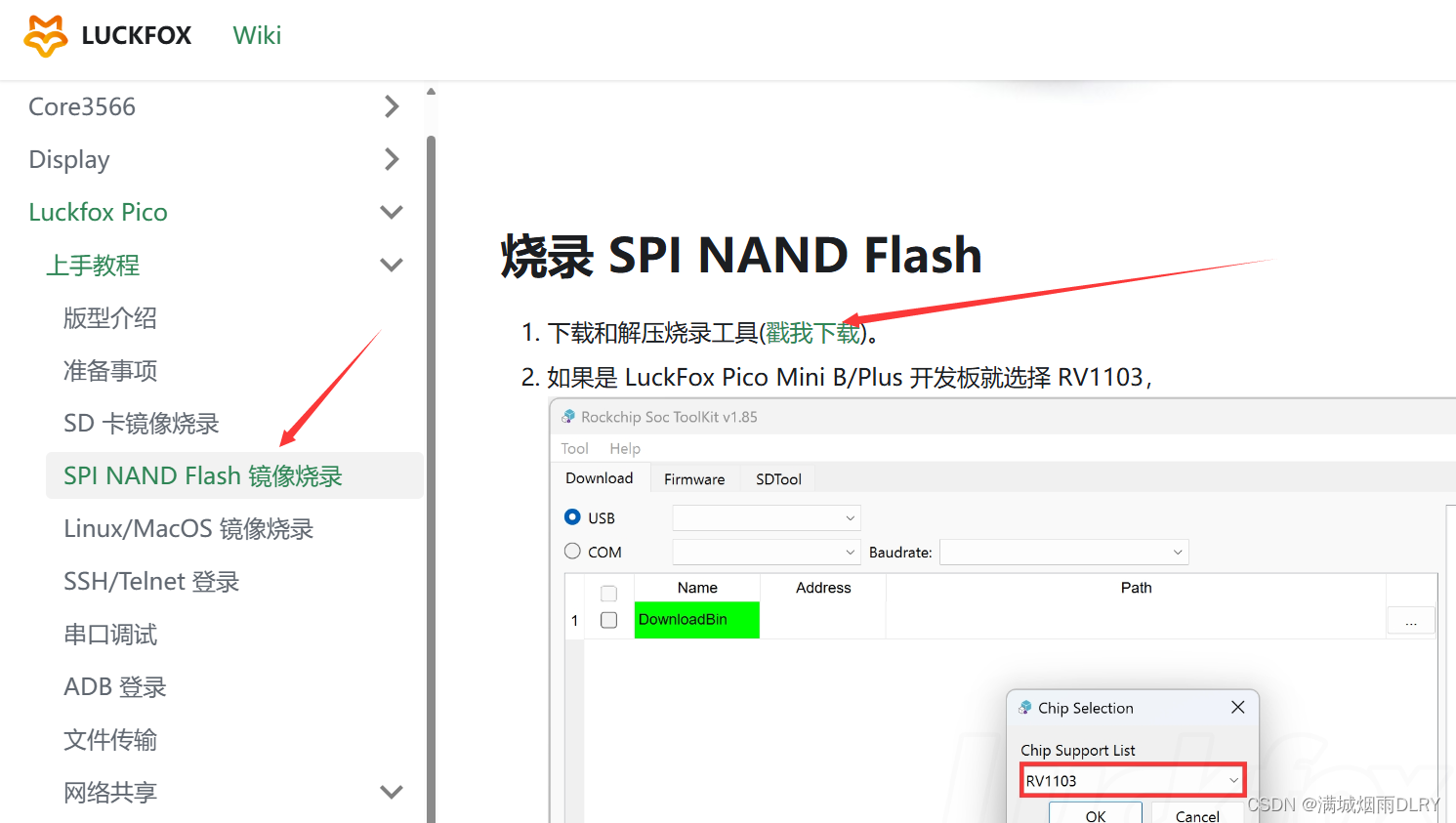
教程里面直接下载驱动的启动程序:

解压后直接运行exe,安装完驱动后重启:

重启后试一试能不能识别,如果没有识别就看看是不是线的问题,我用以前一块开发板的原装线识别失败,但拼夕夕的几块的快充线竟然能识别,打开SocToolKit工具后,按住boot按键然后插USB线,然后松手:
工具在这个目录:
喜欢用Ubuntu就需要使用SD卡启动(Ubuntu太大了),用Buildroot就用自带的 SPI NAND FLASH启动足以。
创建SD卡:

SD卡写入完成:

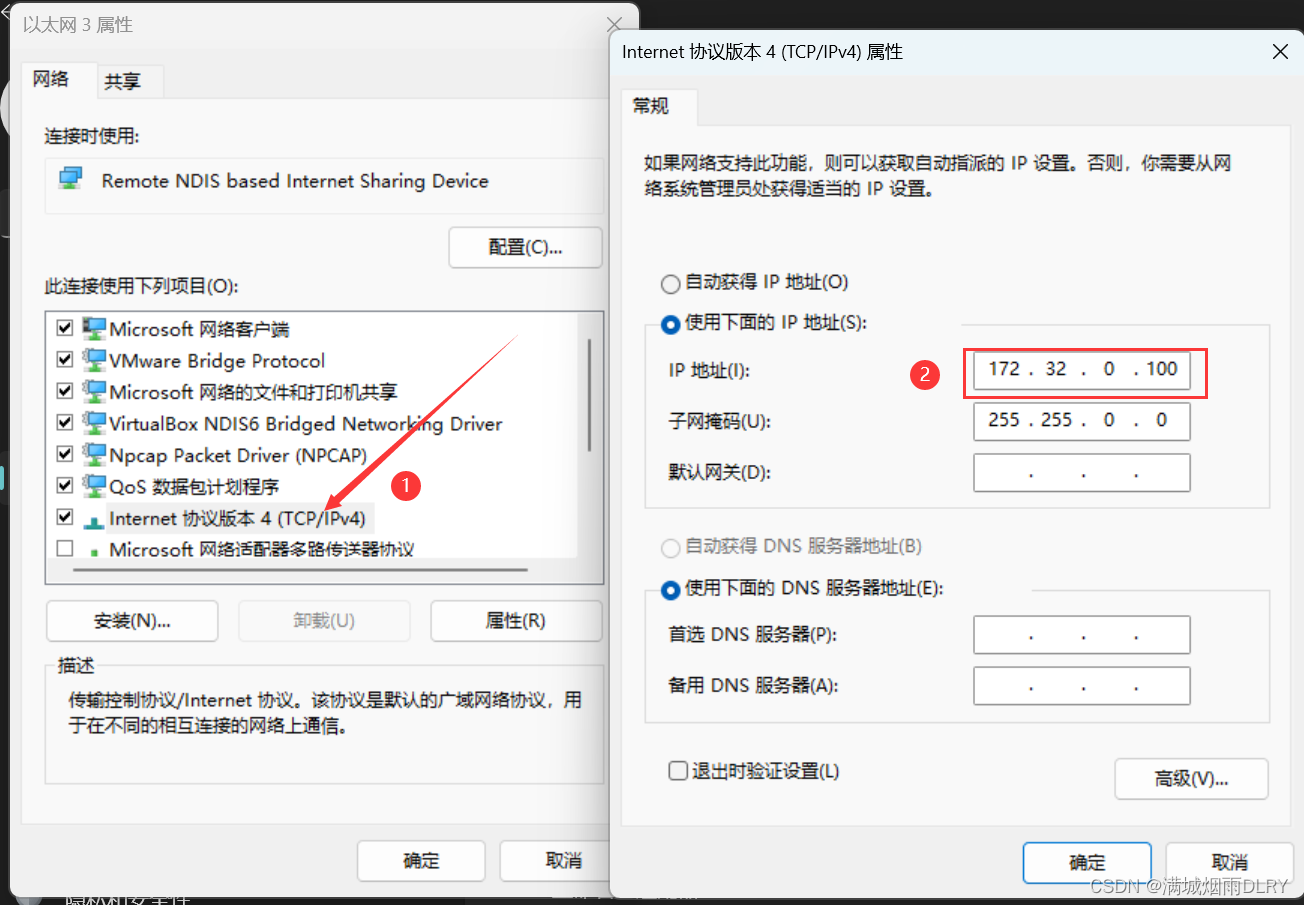
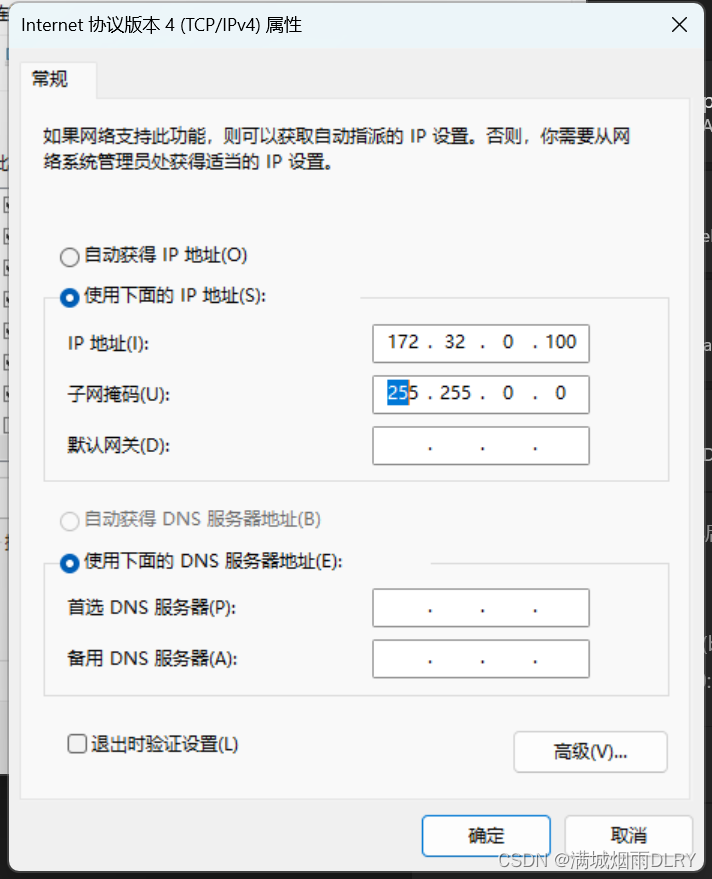
2 网关配置
如果你使用网线就不用这步。
从设置进入下图位置,你会看到一个Remote NDIS based nternet Sharing Device,如果没有就等一会或者看看线是不是松了:

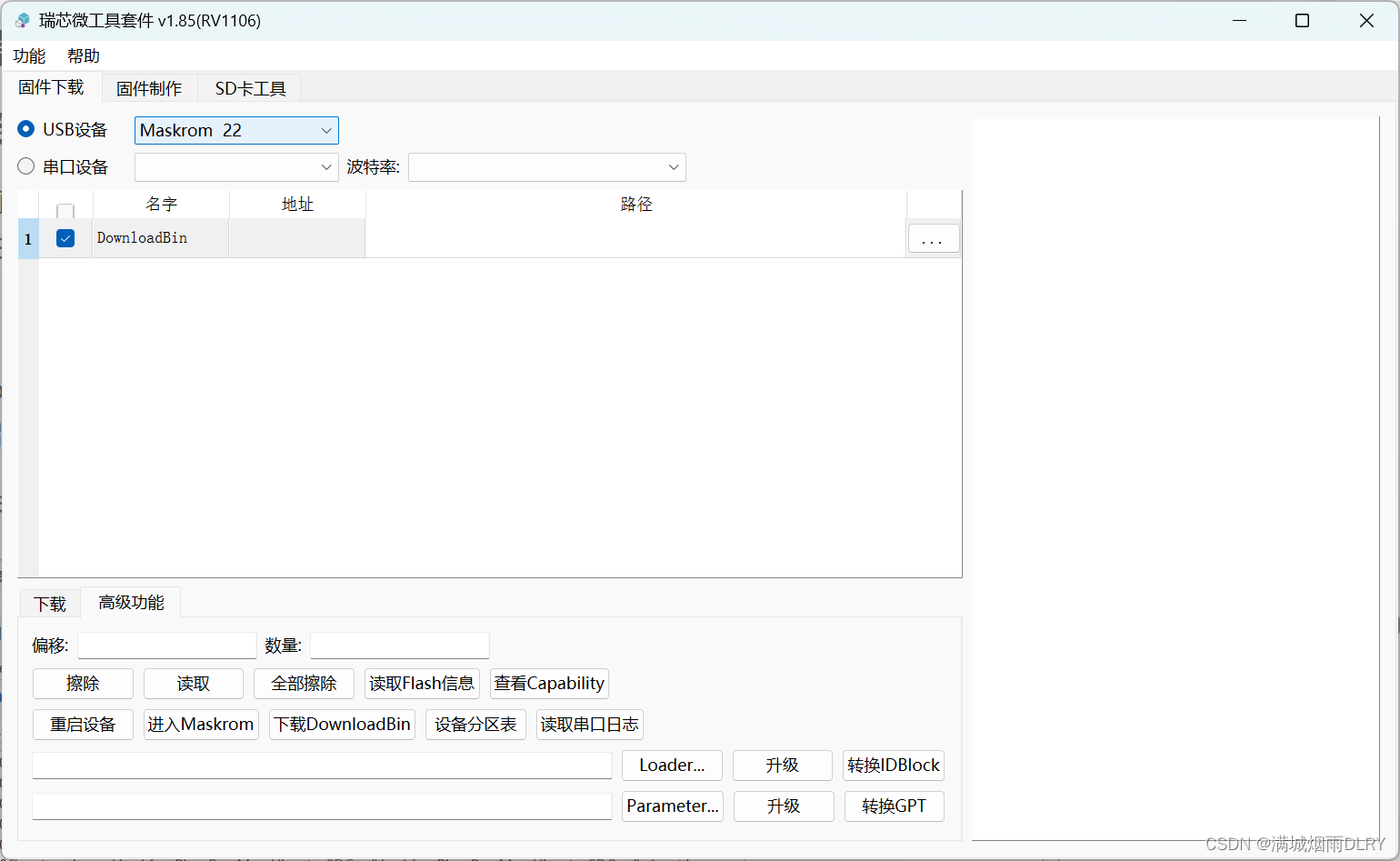
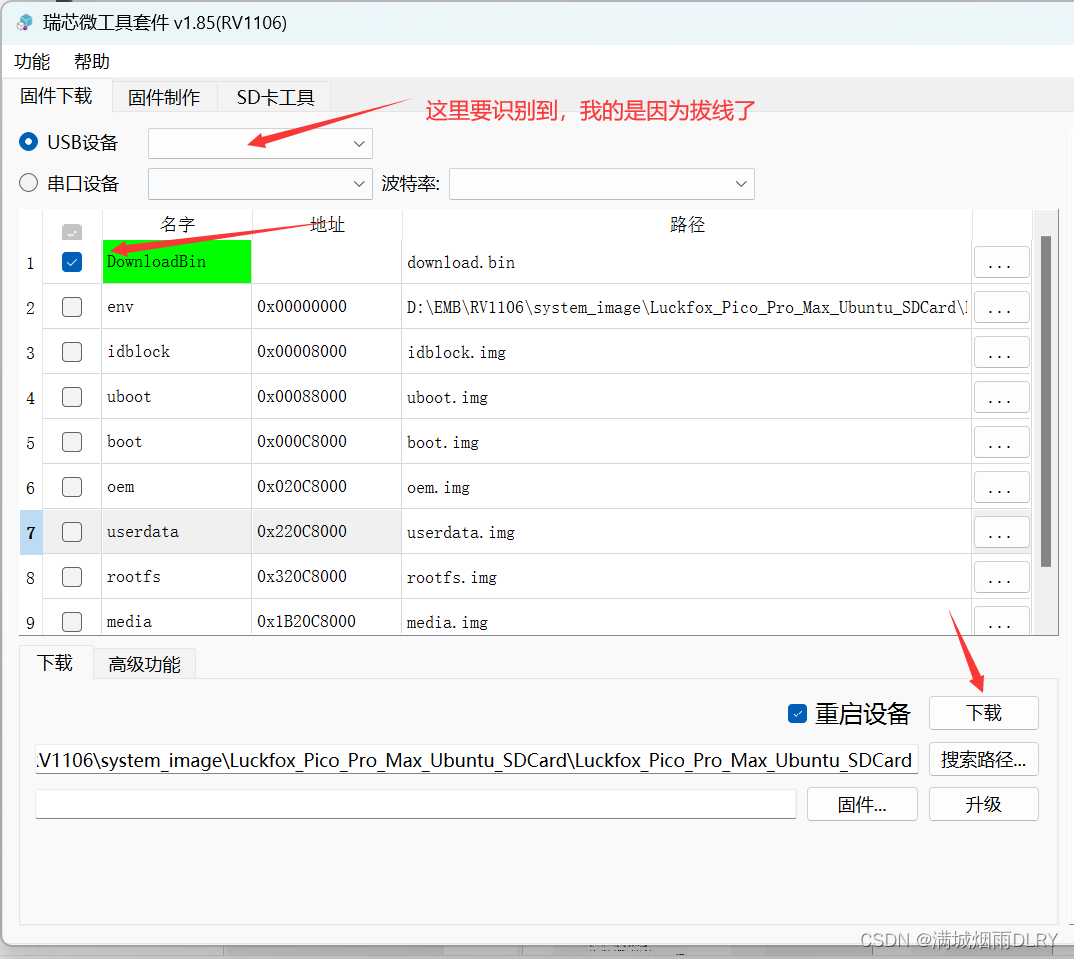
3 先下载固件,使用SD卡启动要清除flash
先下载固件,只要downloadbin,他在你下载的镜像的文件夹里:
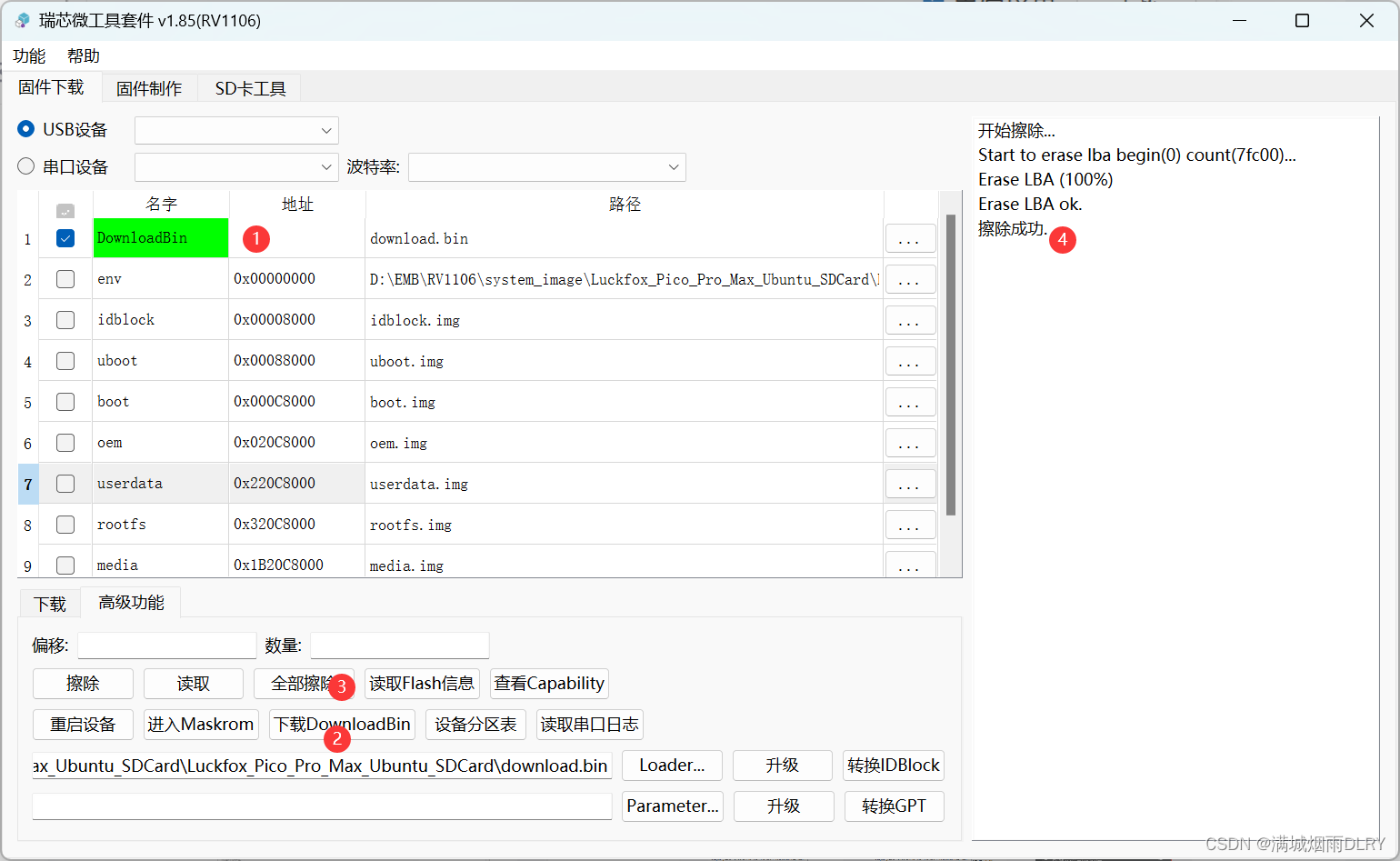
然后擦除flash
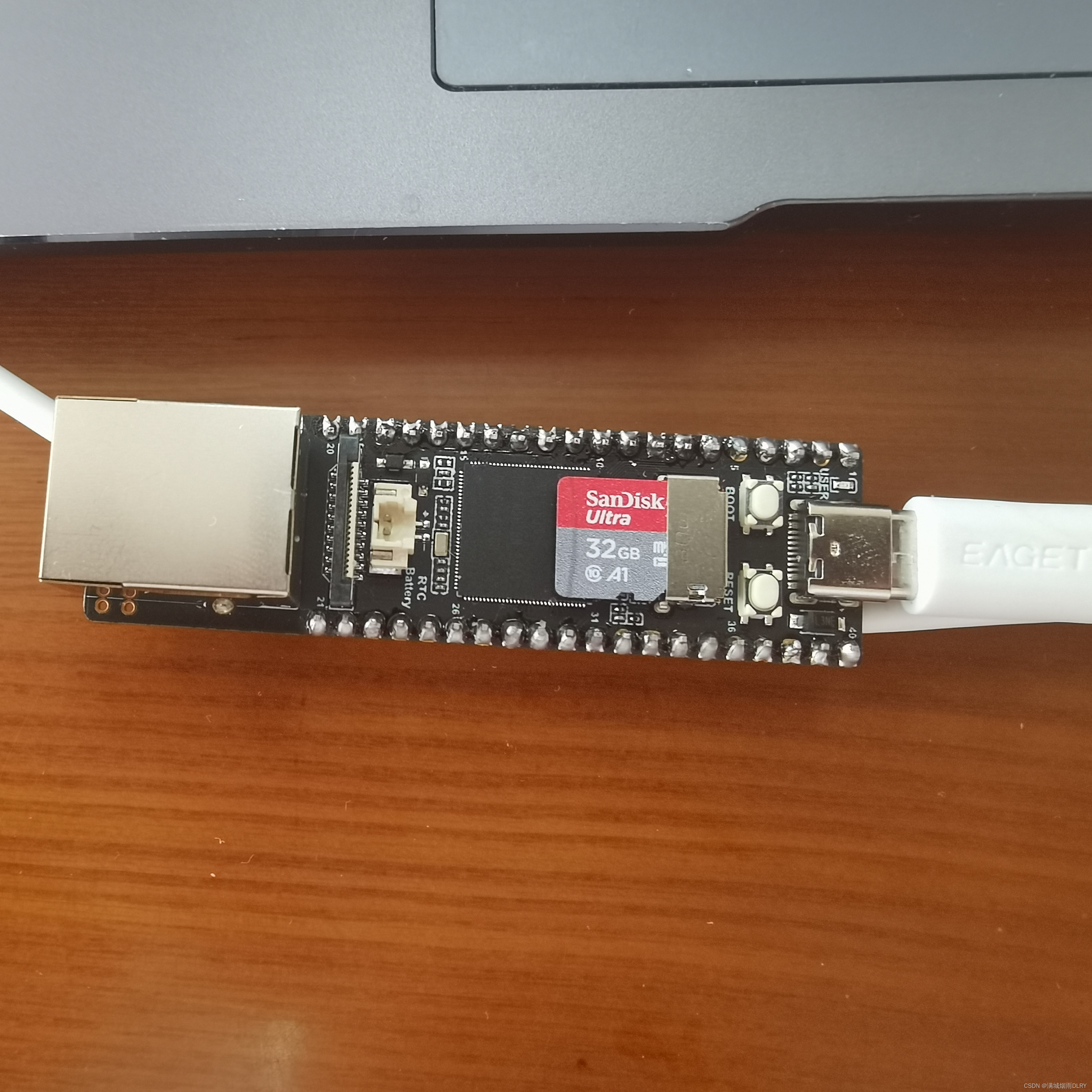
然后我们插上卡,SD卡别插错了,ping一下:
ping不了的看看这里:

然后打开终端(powershell),键入ssh pico@172.32.0.70
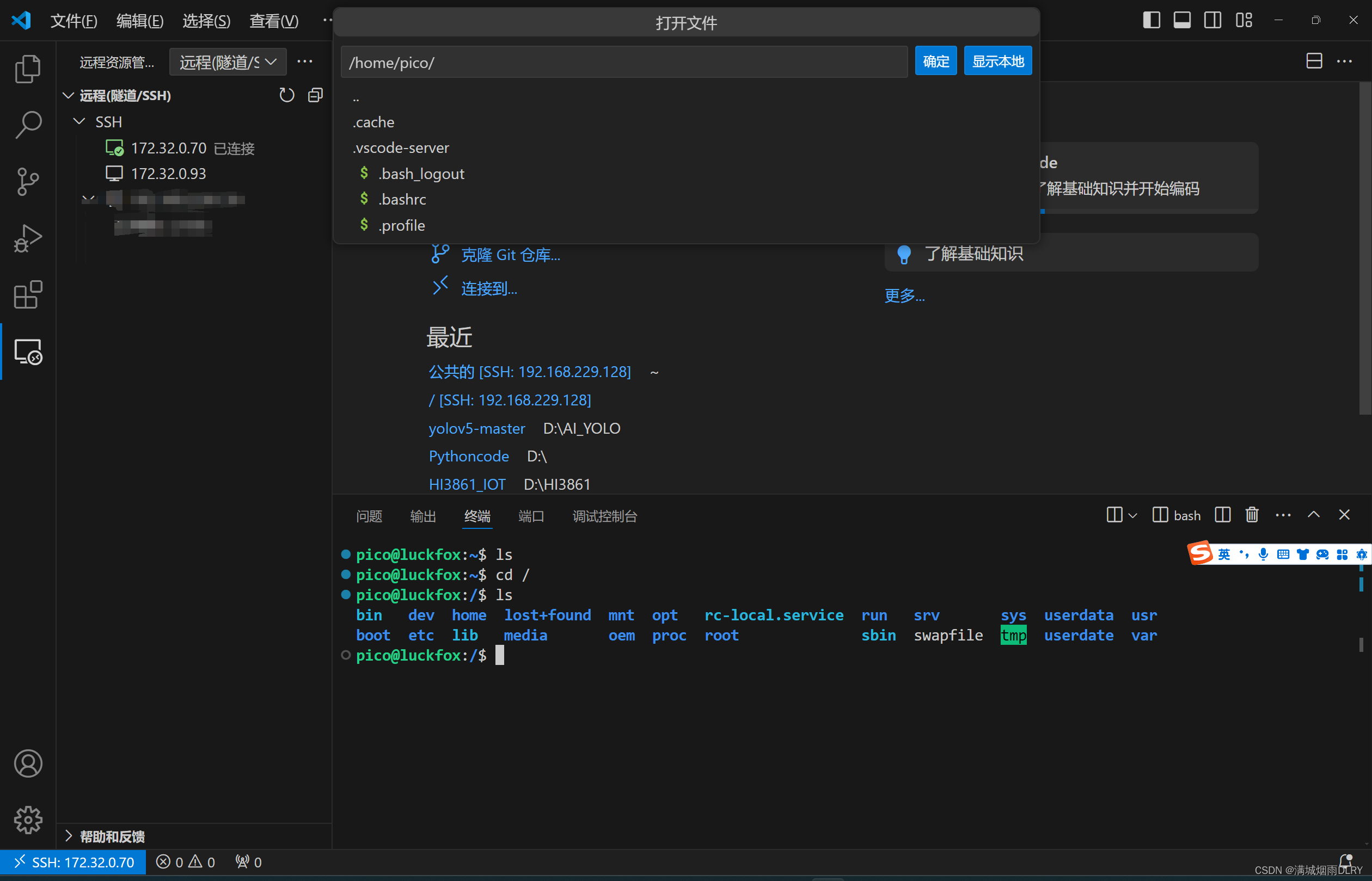
用vscode登录一下(这个第一次会很慢,有两次密码输入):
二、SDK的下载与配置
1 拉取SDK
安装依赖(大概4~5G):
sudo apt update
sudo apt-get install -y git ssh make gcc gcc-multilib g++-multilib module-assistant expect g++ gawk texinfo libssl-dev bison flex fakeroot cmake unzip gperf autoconf device-tree-compiler libncurses5-dev pkg-config bc python-is-python3 passwd openssl openssh-server openssh-client vim file cpio rsync先建一个文件夹:

拉取:
git clone https://gitee.com/LuckfoxTECH/luckfox-pico.git拉取后目录结构如下(刚拉取的时候是没有output的):
├── build.sh -> project/build.sh ---- SDK编译脚本
├── media --------------------------- 多媒体编解码、ISP等算法相关(可独立SDK编译)
├── sysdrv -------------------------- U-Boot、kernel、rootfs目录(可独立SDK编译)
├── project ------------------------- 参考应用、编译配置以及脚本目录
├── output -------------------------- SDK编译后镜像文件存放目录
└── tools --------------------------- 烧录镜像打包工具以及烧录工具下图的READEME_CN.md里面有中文的介绍,包括后面编译的一些内容

编译后的镜像会到output文件夹里:
output/
├── image
│ ├── download.bin ---------------- 烧录工具升级通讯的设备端程序,只会下载到板子内存
│ ├── env.img --------------------- 包含分区表和启动参数
│ ├── uboot.img ------------------- uboot镜像
│ ├── idblock.img ----------------- loader镜像
│ ├── boot.img -------------------- kernel镜像
│ ├── rootfs.img ------------------ kernel镜像
│ └── userdata.img ---------------- userdata镜像
└── out
├── app_out --------------------- 参考应用编译后的文件
├── media_out ------------------- media相关编译后的文件
├── rootfs_xxx ------------------ 文件系统打包目录
├── S20linkmount ---------------- 分区挂载脚本
├── sysdrv_out ------------------ sysdrv编译后的文件
└── userdata -------------------- userdata2 配置文件
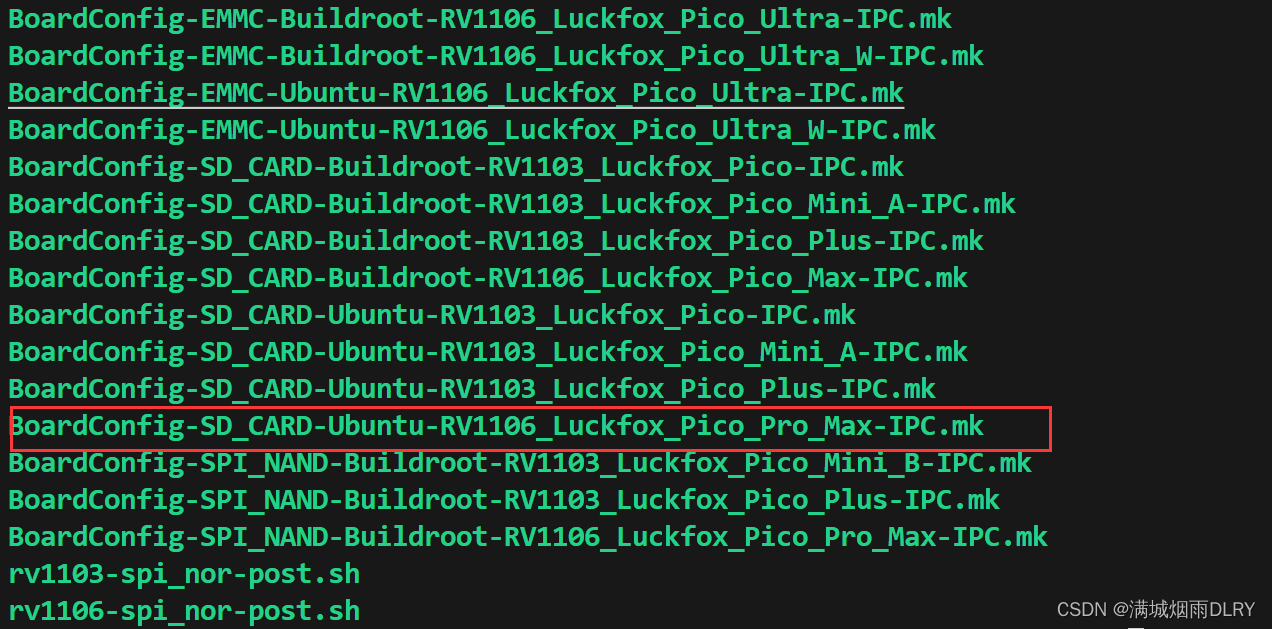
Luckfox-Pico 系列 SDK 配置文件存放在 project/cfg/BoardConfig_IPC 目录下,这个目录的内容和教程的内容相比更新了,红框是我们配置RV1106SD卡Ubuntu系统的配置文件:
看看里面写了啥:
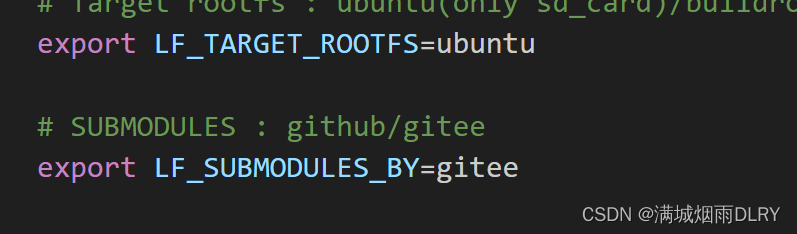
根据教程要改这两个,原来是github,我记得上一版是gitee啊:
我们看看其他的都是啥:
板级配置(Board Config)
RK_CHIP:指定目标芯片型号,这里设置为rv1106。RK_APP_TYPE:定义应用程序的类型,这里设置为RKIPC_RV1106。RK_BOOTARGS_CMA_SIZE:在环境中配置连续内存分配器(CMA)的大小,在此为"66M",即66兆字节。这是给摄像头分配内存用的RK_KERNEL_DTS:指定内核设备树源文件的名称,此处为rv1106g-luckfox-pico-pro-max.dts。之后我们修改设备树要去这里修改。
启动介质(BOOT_MEDIUM)
RK_BOOT_MEDIUM:指定目标启动介质,可以是SD卡(sd_card)、SPI NOR闪存(spi_nor)、SPI NAND闪存(spi_nand),这里设置为SD卡。RK_UBOOT_DEFCONFIG_FRAGMENT:指定Uboot的defconfig片段,用于额外的配置定义,此处为rk-emmc.config。RK_PARTITION_CMD_IN_ENV:在环境中配置分区命令,详细定义了每个分区的大小、偏移量和名称。SD卡没分区就不用管,否则要匹配一下。RK_PARTITION_FS_TYPE_CFG:配置每个分区的文件系统类型。在这个设置中,rootfs、userdata和oem分区被设置为ext4文件系统类型。
目标根文件系统(TARGET_ROOTFS)
LF_TARGET_ROOTFS:指定目标根文件系统的类型,可以是ubuntu(仅限SD卡)、buildroot、busybox,这里选择了buildroot。RK_BUILDROOT_DEFCONFIG:指定Buildroot的默认配置文件,这里是luckfox_pico_defconfig。
默认配置(Defconfig)
RK_ARCH:指定目标架构,这里为arm。RK_TOOLCHAIN_CROSS:指定交叉编译工具链,此处为arm-rockchip830-linux-uclibcgnueabihf。RK_MISC:指定"wipe_all-misc.img",可能是用于恢复或清除设定的一个镜像文件。
Uboot和内核配置
RK_UBOOT_DEFCONFIG:Uboot的默认配置,有两次定义(可能是个错误或者是为了覆盖之前的设置),分别设置为rv1106_defconfig和luckfox_rv1106_uboot_defconfig。RK_KERNEL_DEFCONFIG:内核的默认配置,这里为luckfox_rv1106_linux_defconfig。
相机传感器配置
RK_CAMERA_SENSOR_IQFILES:指定相机传感器的图像质量(IQ)文件,帮助校准图像处理。RK_CAMERA_SENSOR_CAC_BIN:指定镜头色差校正(CAC)的二进制文件名,用于镜头校准。
其他配置
RK_APP_IPCWEB_BACKEND、RK_BUILD_APP_TO_OEM_PARTITION、RK_ENABLE_ROCKCHIP_TEST:这些未导出的变量提供有关是否构建IPC Web后端、是否将应用程序安装到OEM分区以及是否启用rockchip测试的选项。
三、交叉编译链的安装与编译
1 交叉编译链的安装
到下面路径:
{你的SDK存储路径}LuckFox_RV1106/luckfox-pico/tools/linux/toolchain/arm-rockchip830-linux-uclibcgnueabihf然后终端输入:
source env_install_toolchain.sh如果显示:sed: 无法读取 /root/.bash_profile: 没有那个文件或目录
要在/home/你的用户/创建一个:
touch /home/{你的用户目录}/.bash_profile然后我们的编译链会存储在刚才source的目录的bin里面。
2 补全一个文件(这步不用看了,更新了现在会自动拉取。。。)
为什么有这一步?因为直接编译出现了bug:
解读这段代码:看看这段出了什么问题: ==sysdrv== build ubuntu
==ubuntu==
test -f /home/user/LuckFox_RV1106/luckfox-pico/sysdrv/tools/board/ubuntu/luckfox-ubuntu-22.04.3.tar.gz || (\
pushd /home/user/LuckFox_RV1106/luckfox-pico/sysdrv/tools/board/ubuntu/ ;\
./split_and_check_md5.sh merge ./luckfox-ubuntu-22.04.3.tar.gz ;\
popd ;\
);
/bin/bash: line 1: pushd: /home/user/LuckFox_RV1106/luckfox-pico/sysdrv/tools/board/ubuntu/: No such file or directory
/bin/bash: line 2: ./split_and_check_md5.sh: No such file or directory
/bin/bash: line 4: popd: directory stack empty
make: *** [Makefile:624: ubuntu] Error 1
make: Leaving directory '/home/user/LuckFox_RV1106/luckfox-pico/sysdrv'
[build.sh:error] Running build_sysdrv failed!
[build.sh:error] exit code 2 from line 650:
[build.sh:info] make -C ${SDK_SYSDRV_DIR}这个bug是因为/LuckFox_RV1106/luckfox-pico/sysdrv/tools/board目录下没有ubuntu的文件夹,自然也没有相关的文件,根据报错我们可以看到这段代码主要执行了以下步骤:
- 检查
/home/qxy/LuckFox_RV1106/luckfox-pico/sysdrv/tools/board/ubuntu/luckfox-ubuntu-22.04.3.tar.gz文件是否存在。- 如果不存在,
pushd命令尝试切换到/home/qxy/LuckFox_RV1106/luckfox-pico/sysdrv/tools/board/ubuntu/目录。- 在该目录下,尝试执行
./split_and_check_md5.sh merge ./luckfox-ubuntu-22.04.3.tar.gz命令,以合并分割的tar.gz文件并检查MD5。- 执行完毕后,使用
popd命令返回到之前的工作目录。
所以在这个目录下补全:
/home/你的用户/LuckFox_RV1106/luckfox-pico/sysdrv/tools/board在这个目录下创建ubuntu文件夹(PS:我在后来是用22.04的时候这个文件夹出现了![]() 但是里面还是啥也没有):
但是里面还是啥也没有):
mkdir ubuntucd 到ubuntu文件夹然后 拉取一些文件:
cd ubuntu
git clone https://gitee.com/LuckfoxTECH/pico_ubuntu.git然后会发现拉取后ubuntu下面哟一个文件夹叫pico_ubuntu我们将这个文件夹的内容拿出来(下面这段代码在ubuntu(刚创建的ubuntu文件夹)这个路径下使用):
mv pico_ubuntu/* . && rm -r pico_ubuntu如下图:

上图的一堆文件就是分割后的luckfox-ubuntu-22.04.3.tar.gz,的而split_and_check_md5.sh的就是用来拼接这些份文件的,拼接不在这里做,运行bash时会调用。
到此大概6~7G。
3 编译
编译由两部分操作构成:
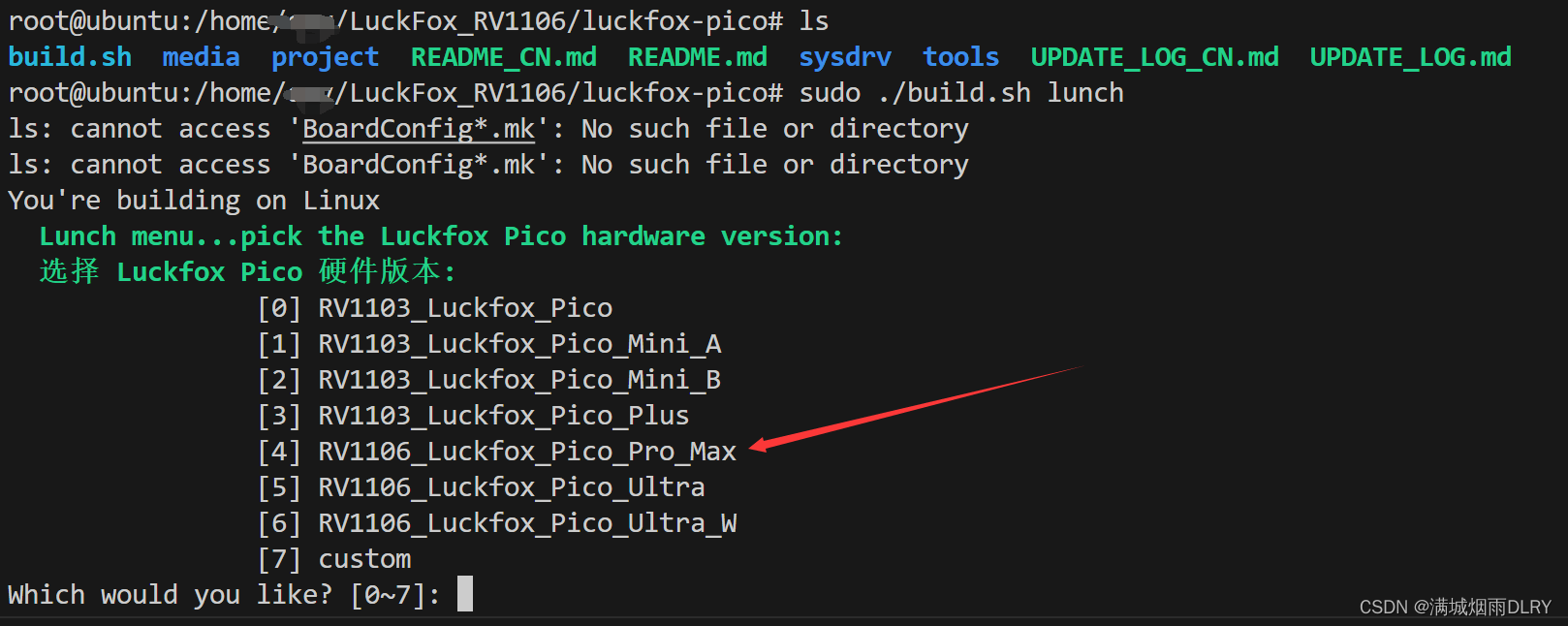
① 选择对应的板级配置选项:sudo ./build.sh lunch(Ubuntu必须用sudo)
哦?这里的界面也更新了,比原来的好多了,这里选择4(虽然他叫pro_max(128MB版本),但从之前的配置文件也可以看出这两个开发板是一个)

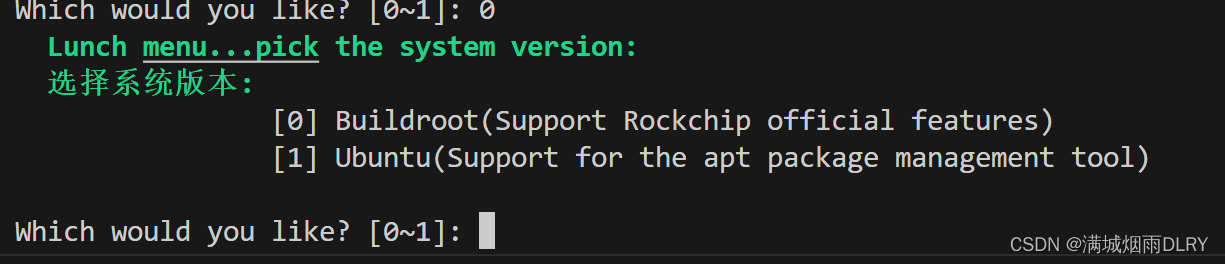
到下面这里就开发板选择成功了:

② 选择你的操作: ./build.sh # 一键自动编译 ./build.sh {options}
文档也说了支持单独编译(下方内容来自README_CN.me)(修改设备树后编译用):
一键自动编译
- 编译busybox/buildroot
./build.sh lunch # 选择参考板级 ./build.sh # 一键自动编译- 编译ubuntu
sudo ./build.sh lunch # 选择参考板级 sudo ./build.sh # 一键自动编译
- 注意编译ubuntu时需要注意使用sudo,否则会导致文件系统错误
- 下文就不一一区分两者指令区别,请自行根据情况选择
单独编译U-Boot
./build.sh clean uboot ./build.sh uboot生成镜像文件:
output/image/MiniLoaderAll.bin
output/image/uboot.img
./build.sh clean kernel ./build.sh kernel生成镜像文件:
output/image/boot.img
./build.sh clean rootfs ./build.sh rootfs
- 注:编译后需使用
./build.sh firmware命令重新打包
./build.sh clean media ./build.sh media生成文件的存放目录:
output/out/media_out
- 注:编译后需使用
./build.sh firmware命令重新打包
./build.sh clean app ./build.sh app
- 注1:app依赖media
- 注2:编译后需使用
./build.sh firmware命令重新打包
./build.sh firmware生成文件的存放目录:
output/image
./build.sh kernelconfig打开 kernel 的 menuconfig 界面
./build.sh buildrootconfig4 开始编译,漫长的等待。。。
其实也就半小时。。。。
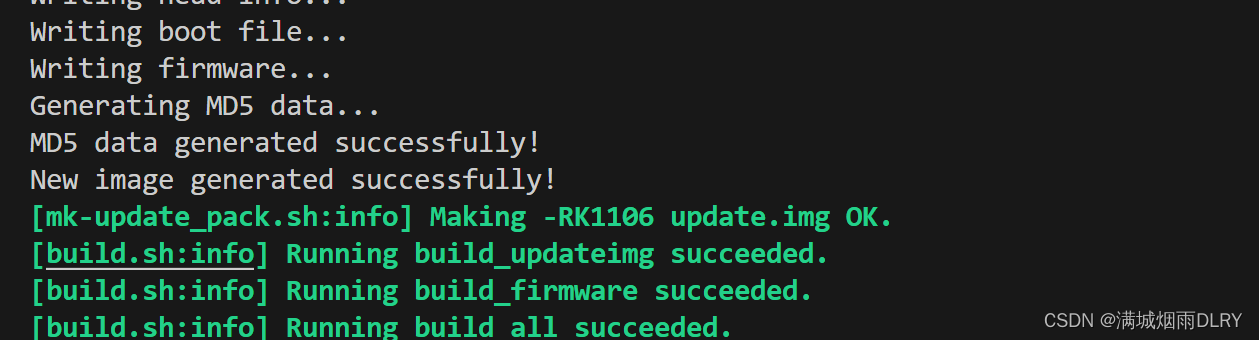
到此,整个配置过程结束。