工业相机是将目标物体的表面特征信息转化为数字信号(或者模拟信号)的一种采集设备。
一、工业相机的成像原理

工业相机主要由光电传感器和转换电路组成。
光线照射到被检测物体的表面,反射光经过透镜,再进入相机的光电传感器;
光电传感器的感光元件将光信号转换成电信号;
再经过转换电路将电信号转换成数字信号。
二、工业相机的分类
1、按照感光芯片的分类:可分为CCD相机和CMOS相机
CCD相机:CCD就是电荷耦合的意思,是将感光元件接收到的光信号,根据不同的光强度,转换成不同的电流大小。感光元件最终输出的是模拟电信号。等所有的感光元件的模拟电信号输出完之后,再将模拟电信号统一放大,再转换成数字信号。
就因为以上原因,CCD相机输出的图像噪点少,图像质量高,灵敏度和动态响应好。但是成本高,动态范围小,功耗也高。
CMOS相机:CMOS相机的感光元件将放大部分和模数转换部分整到一起,每个感光元件输出的模拟电流信号都能被放大并转换成数字信号,最终将所有的数字信号合并,输出给DSP芯片进行处理。每个元件的放大倍数是无法统一的。
因此CMOS相机输出的图像噪点就比较多,图像质量相对差一些。但是成本低,功耗小,动态范围大,分辨率高。
2、按照传感器像素排列方式分类:可分为线阵相机和面阵相机
线阵相机:线阵相机的传感器只有1行感光元件,它需要再运动中拍摄,一行一行的扫描目标物体的表面,再根据输出合成特定像素大小的图像。
线阵相机数据传输快,灵敏度高,分辨率高,适合用在高精度高速检测的地方。但是一行一行的扫描效率太低了,成本还高,拼接图像的参数调试麻烦,一般人不好驾驭。
面阵相机:面阵相机的传感器是一整面的,可以直接输出完整的平面图像。操作也简单,因此面阵相机再机器视觉中用的比较多。面阵相机的分辨率和帧率还是不如线阵相机。
3、按照色彩分类:可分为黑白相机和彩色相机
黑白相机:黑白相机是将不同强度的光信号转换成256级的灰度值,通过亮暗来表示目标物体的信息。黑白图像可以被图像处理软件直接处理,简化了图像格式的转换过程。
彩色相机:彩色相机通过RGB三个颜色通道输出图像信息,能更真实反应目标物体的颜色信息。如果不关注颜色的话,大部分还是选用黑白相机。
4、按照输出数据的方式:可分为数字相机和模拟相机
数字相机内部有模数转换器,直接输出数字信号。模拟相机没有模数转换器,需要将信号传送给专门的图像采集卡处理。
三、工业相机的接口
工业相机常用的接口有USB、GIGE、Camera Link、Fireware
USB相机:支持热插拔,使用便捷,成本低,最高传输速度480Mbps;
GIGE相机:成本低、传输带宽1Gbit,可使用标准的NIC卡,因此GIGE相机被广泛使用;
Camera Link相机:传输速度可达6400Mbps,抗干扰能力强,价格也高,用在高速数据场合;
Fireware相机:主要用于嵌入式系统。
四、工业相机的主要参数
工业相机的主要参数包括分辨率、像素尺寸、感光芯片尺寸、帧率、像素深度、曝光时间这6个。
1、分辨率:分辨率也就是图像所包含的像素数量,通常用 宽*高 W * H来表示W是图像水平方向上的像素数量,H是图像垂直方向上的像素数量。
2、像素尺寸:像素尺寸是单个像素的大小。
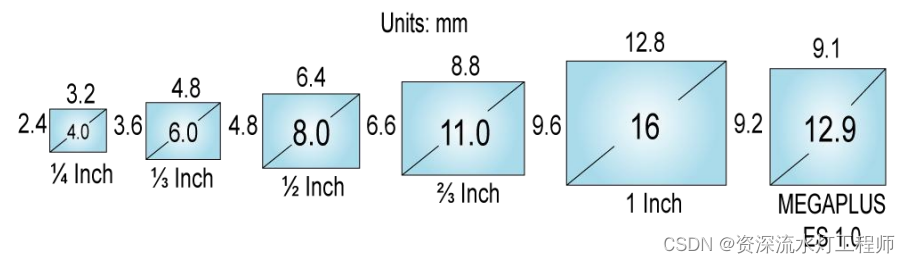
3、感光芯片的尺寸:是图像传感器感光区域的大小,它决定了视觉系统的物理放大倍率,常用inch来表示,就是对角线的长度。
4、帧率:帧率是指相机每秒钟能拍摄的图像张数,也叫帧数。帧率越大,相机获取单帧图像的时间就越少。在运动中拍摄目标时,要保证帧率与运动速度相匹配。帧率过低,拍摄的图像辉出现拖影。
5、像素深度:像素深度是指每个像素用来存储信号的数据位数。灰度图像一般是8bits,0--255,共256级。彩色图像一般是RGB三个通道,每个通道8bits,一共24bits。像素深度越深,图像越清晰,但是存储空间也越大,采集和处理的时间也越长。
6、曝光时间:曝光时间是指相机拍摄物体时,快门从打开到关闭的时间。曝光时间越短,进光量就越少,拍摄的图像就暗,图像拖影的现象也少,感觉拖影就是光吃饱了撑着了。拍的高速运动的物体时,为保证图像不产生拖影,应该让物体在曝光时间内移动的距离不超过一个像元尺寸(像元就是单个感光元件,像元的尺寸有时可以理解成像素的尺寸)。