1. 引言
3D线扫相机(3D line scan camera)是一种高精度的三维测量设备,广泛应用于工业自动化、质量控制和精密测量等领域。与传统二维成像相机不同,3D线扫相机能够同时获取物体的深度信息和反射强度信息,从而为高精度三维重建和表面特性分析提供了重要数据支持。
2. 工作原理
3D线扫相机通过线扫描的方式逐行获取物体表面的数据。其工作原理如下:相机发出一条激光线,投射到物体表面。物体表面反射的激光被相机的线性传感器捕捉到,并记录下相应的深度数据和反射强度数据。相机和物体之间通过相对运动(例如传送带上的物体移动)完成对整个物体的扫描,从而生成完整的点云数据和反射强度图。
3. 深度数据(点云)的获取
在扫描过程中,线扫相机通过三角测量法(triangulation method)计算出物体表面各点到相机的距离。具体而言,激光线在物体表面形成的光斑被相机传感器捕捉,通过已知的相机几何参数(如基线距离和视角),可以精确计算出每个光斑的位置坐标,从而生成三维点云数据。点云数据包含了物体表面每个点的三维坐标 (X, Y, Z),这是进行三维重建和形状分析的基础。
4. 激光反射强度数据的获取
除了深度数据,线扫相机还记录了激光反射的强度信息。反射强度数据(intensity data)反映了激光在物体表面反射回来的信号强度,即物体表面对激光的反射情况。不同材料和表面特性的物体,其反射强度不同。例如,光滑表面和粗糙表面的反射强度会有显著差异,金属表面和塑料表面的反射强度也会有所不同。
激光反射强度数据的获取依赖于相机传感器的感光能力。在扫描过程中,相机传感器记录下每个点的反射强度值,这些强度值可以用来生成反映物体表面特性的一维数组。
5. 灰度图(纹理图)的生成
通过激光反射强度数据,可以生成一张灰度图或称为纹理图(texture map)。这张图像是对物体表面反射特性的可视化表达。生成纹理图的步骤如下:
1.点云投影:首先,将获取的三维点云数据投影到二维图像平面上。投影方法依据相机的内参(包括焦距 fx、fy 和主点坐标 cx、cy),将三维坐标 (X, Y, Z) 转换为二维坐标 (u, v)。投影公式如下:
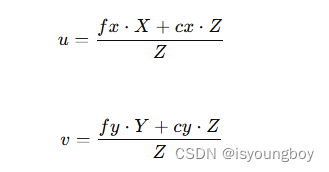
2.强度映射:将每个投影点对应的激光反射强度值映射到图像的相应像素位置。生成的灰度图像素值范围通常为 0 到 255,反映了激光反射信号的强弱,强度值越高,灰度越亮。
6. 应用实例
生成的灰度图可以直接应用于表面特性分析、缺陷检测和材料区分等领域。例如,在工业检测中,通过分析灰度图中的亮度分布,可以识别出产品表面的划痕、凹凸不平等缺陷;在材料区分中,不同材料由于反射特性不同,会在灰度图中表现出不同的亮度值,方便进行材料分类和识别。




![[手游] 天命与厄动:世界](https://img-blog.csdnimg.cn/img_convert/939434a7a1c6b837db946c074f88e445.jpeg)