采用k-最近邻KNN和随机森林算法建立预测模型。
import pandas as pd
from sklearn.model_selection import train_test_split
from sklearn.svm import SVC # Support Vector Classifier
from sklearn.preprocessing import StandardScaler
from sklearn.metrics import accuracy_score, classification_report
from sklearn.decomposition import TruncatedSVD
from ydata_profiling import ProfileReport
from sklearn.metrics import mean_squared_error
import time
import seaborn as sns
from importlib import reload
import matplotlib.pyplot as plt
import matplotlib
import warnings
from IPython.display import display, HTML
import plotly.graph_objects as go
import plotly.express as px
from plotly.subplots import make_subplots
import plotly.io as pio
# Configure Jupyter Notebook
pd.set_option('display.max_columns', None)
pd.set_option('display.max_rows', 500)
pd.set_option('display.expand_frame_repr', False)
display(HTML("<style>div.output_scroll { height: 35em; }</style>"))dataset = pd.read_csv('Battery_RUL.csv')profile = ProfileReport(dataset)
profileSummarize dataset: 0%| | 0/5 [00:00<?, ?it/s]Generate report structure: 0%| | 0/1 [00:00<?, ?it/s]Render HTML: 0%| | 0/1 [00:00<?, ?it/s]y = dataset['RUL']x = dataset.drop(columns=['RUL'])X_train, X_test, y_train, y_test = train_test_split(x, y, test_size=0.2, random_state=42)Singular Value Decomposition
# Step 5: Initialize and fit TruncatedSVD to your training data
n_components = 6 # Adjust the number of components based on your desired dimensionality
svd = TruncatedSVD(n_components=n_components, random_state=42)
X_train_svd = svd.fit_transform(X_train)
# Step 6: Transform the test data using the fitted SVD
X_test_svd = svd.transform(X_test)K-Nearest-Neighbors
from sklearn.neighbors import KNeighborsRegressor
start = time.time()
model = KNeighborsRegressor(n_neighbors=3).fit(X_train_svd,y_train)
end_train = time.time()
y_predictions = model.predict(X_test_svd) # These are the predictions from the test data.
end_predict = time.time()
kNN = [model.score(X_test_svd,y_test),
mean_squared_error(y_test,y_predictions,squared=False),
end_train-start,
end_predict-end_train,
end_predict-start]
print('R-squared error: '+ "{:.2%}".format(model.score(X_test_svd,y_test)))
print('Root Mean Squared Error: '+ "{:.2f}".format(mean_squared_error(y_test,y_predictions,squared=False)))R-squared error: 98.93%
Root Mean Squared Error: 33.30plt.style.use('seaborn-white')
plt.rcParams['figure.figsize']=5,5
fig,ax = plt.subplots()
plt.title('Actual vs Predicted')
plt.xlabel('Actual')
plt.ylabel('Predicted')
g = sns.scatterplot(x=y_test,
y=y_predictions,
s=20,
alpha=0.6,
linewidth=1,
edgecolor='black',
ax=ax)
f = sns.lineplot(x=[min(y_test),max(y_test)],
y=[min(y_test),max(y_test)],
linewidth=4,
color='gray',
ax=ax)
plt.annotate(text=('R-squared error: '+ "{:.2%}".format(model.score(X_test_svd,y_test)) +'\n' +
'Root Mean Squared Error: '+ "{:.2f}".format(mean_squared_error(y_test,y_predictions,squared=False))),
xy=(0,800),
size='medium')
xlabels = ['{:,.0f}'.format(x) for x in g.get_xticks()]
g.set_xticklabels(xlabels)
ylabels = ['{:,.0f}'.format(x) for x in g.get_yticks()]
g.set_yticklabels(ylabels)
sns.despine()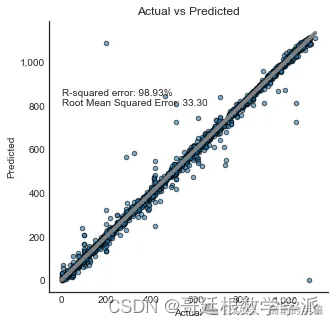
Random Forest
%%time
from sklearn.ensemble import RandomForestRegressor
start = time.time()
model = RandomForestRegressor(n_jobs=-1,
n_estimators=100,
min_samples_leaf=1,
max_features='sqrt',
# min_samples_split=2,
bootstrap = True,
criterion='mse',
).fit(X_train_svd,y_train)
end_train = time.time()
y_predictions = model.predict(X_test_svd) # These are the predictions from the test data.
end_predict = time.time()
Random_Forest = [model.score(X_test_svd,y_test),
mean_squared_error(y_test,y_predictions,squared=False),
end_train-start,
end_predict-end_train,
end_predict-start]
print('R-squared error: '+ "{:.2%}".format(model.score(X_test_svd,y_test)))
print('Root Mean Squared Error: '+ "{:.2f}".format(mean_squared_error(y_test,y_predictions,squared=False)))R-squared error: 99.75%
Root Mean Squared Error: 15.97
CPU times: total: 3.34 s
Wall time: 389 msplt.style.use('seaborn-white')
plt.rcParams['figure.figsize']=5,5
fig,ax = plt.subplots()
plt.title('Actual vs Predicted')
plt.xlabel('Actual')
plt.ylabel('Predicted')
g = sns.scatterplot(x=y_test,
y=y_predictions,
s=20,
alpha=0.6,
linewidth=1,
edgecolor='black',
ax=ax)
f = sns.lineplot(x=[min(y_test),max(y_test)],
y=[min(y_test),max(y_test)],
linewidth=4,
color='gray',
ax=ax)
plt.annotate(text=('R-squared error: '+ "{:.2%}".format(model.score(X_test_svd,y_test)) +'\n' +
'Root Mean Squared Error: '+ "{:.2f}".format(mean_squared_error(y_test,y_predictions,squared=False))),
xy=(0,800),
size='medium')
xlabels = ['{:,.0f}'.format(x) for x in g.get_xticks()]
g.set_xticklabels(xlabels)
ylabels = ['{:,.0f}'.format(x) for x in g.get_yticks()]
g.set_yticklabels(ylabels)
sns.despine()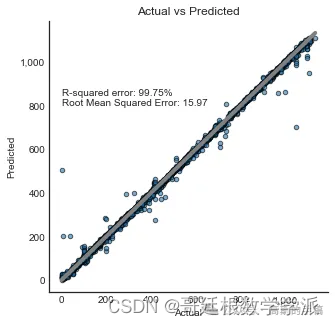
工学博士,担任《Mechanical System and Signal Processing》《中国电机工程学报》《控制与决策》等期刊审稿专家,擅长领域:现代信号处理,机器学习,深度学习,数字孪生,时间序列分析,设备缺陷检测、设备异常检测、设备智能故障诊断与健康管理PHM等。