在 PID控制中,微分信号的引入可改善系统的动态特性,但也易引进高频干扰,在误差扰动突变时尤其显出微分项的不足。若在控制算法中加入低通滤波器,则可使系统性能得到改善。
克服上述缺点的方法之一是在 PID算法中加入一个一阶惯性环节(低通滤波器) ,可使系统性能得到改善。
,可使系统性能得到改善。
不完全微分PID的结构如图(a)、(b)所示,其中图(a)是将低通滤波器直接加在微分环节上,图(b)是将低通滤波加在整个PID控制器之后。下面以图(a)为例进行仿真说明不完全微分PID如何改进了普通PID的性能。

仿真实例:
采用第一种不完全微分算法,被控对象为一时滞系统传递函数:

在对象的输出端加幅值为0.01的随机信号n(k)。采样时间为20ms.低通滤波器为:

取M=1,采用具有不完全微分PID方法,其控制阶跃响应结果如图1所示。取M=2,采用普通PID 方法,阶跃响应结果如图2所示。由仿真结果可以看出,引入不完全微分后,能有效地克服普通PID的不足。尽管不完全微分PID控制算法比普通PID控制算法要复杂些,但由于其良好的控制特性,近年来越来越得到广泛的应用。
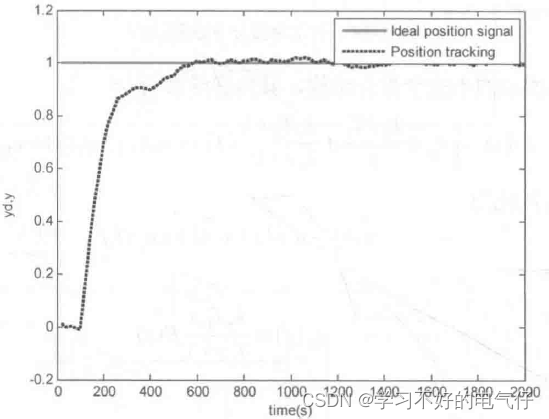
图1 不完全微分控制阶跃响应(M=1)

图2 普通PID控制阶跃响应(M=2)
仿真程序:
%PID Controler with Partial differential
clear all;
close all;
ts=20;
sys=tf([1].[60,1].'inputdelay',80);
dsys=c2d(sys,ts,'zoh');
[num,den]=tfdata(dsys,'V);
u_1=0;u_2=0;u_3=0;u_4=0;u_5=0;
ud_1=0;
y_1=0;y_2=0;y_3=0;error_l=0;
ei=0;
for k=1:1:100
time(k)=k*ts;
yd(k)=1.0;
%Linear model
y(k)=-den(2)*y_l+num(2)*u_5;
n(k)=0.01*rands(1);
y(k)=y(k)+ n(k);
error(k)=yd(k)-y(k);
%PID Controller with partly differential
ei=ei+errorKy
kc=0.30;
ki=0.0055;TD=140;
kd=kc*TD/ts;
Tf=180;
Q-tf[1],[Tf,1]); %Low Freq Signal Filter
M=2;
if M==1 %Using PID with Partial differential
alfa=Tf(ts+Tf);
ud(k)=kd*(1-alfa)*(error(k)-error_1)Halfaud_l;
u(k)=ke*error(k)+ud(k)+ki*ei;
ud_1=ud(k);
elseif M==2 %Using Simple PID
u(k)=kc*error(k)+kd*(error(k)-error_1)+ki*ci;
end
%Restricting the output of controller
if u(k)>=10
u(k)=10;
end
if u(k)<=-10
u(k)=-10;
end
u_5=u_4;u_4=u_3;u_3=u_2;u_2=u_1;u_1=u(k);
y 3=y 2:y_2=y_1;y_1=y(k);
error_l=error(k);
end
figure(1);
plot(time,yd,'r,time,y,'k:',linewidth',2);xlabel('time(s)');ylabel('yd.y');
legend('Ideal position signal', Position tracking);figure(2);
plot(time,u,'r.'linewidth' 2);xlabel('time(s));ylabel('u');figure(3);
bode(Q,T);dcgain(Q);







![[Android开发基础2] 七大常用界面控件(附综合案例)](https://img-blog.csdnimg.cn/82fe577a45df449ba7eb17807bfbc3ad.png)