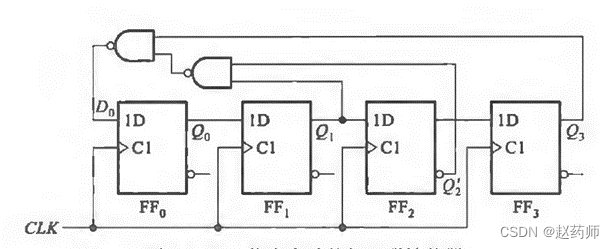
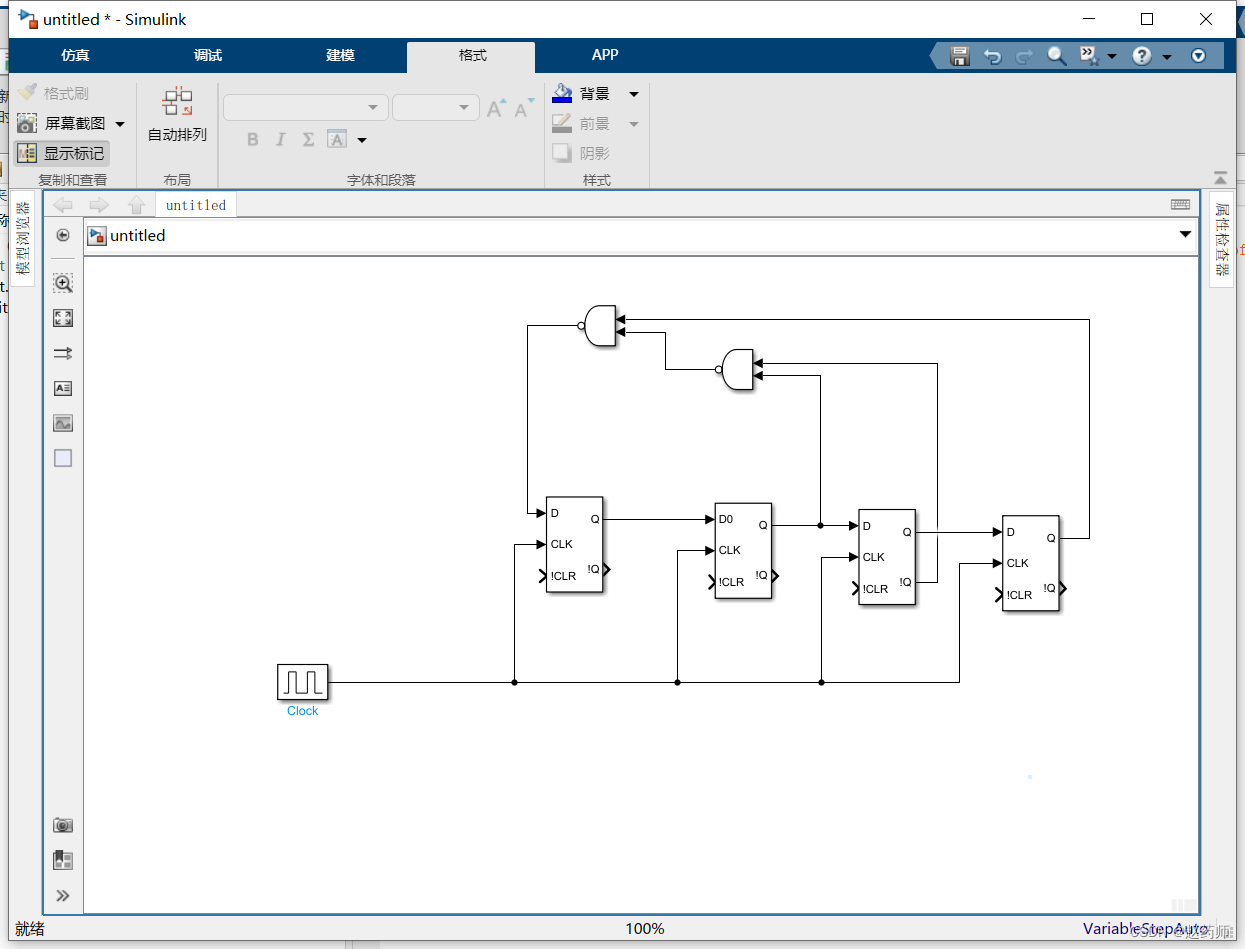
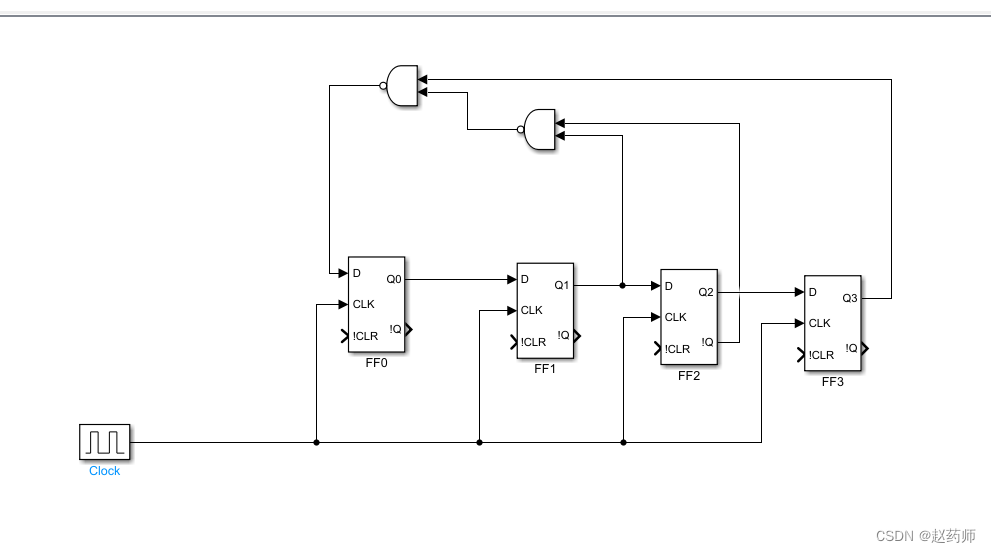
以上述电路图为例:包含D触发器,时钟CLK,与非门
一、启动simulink的三种方式
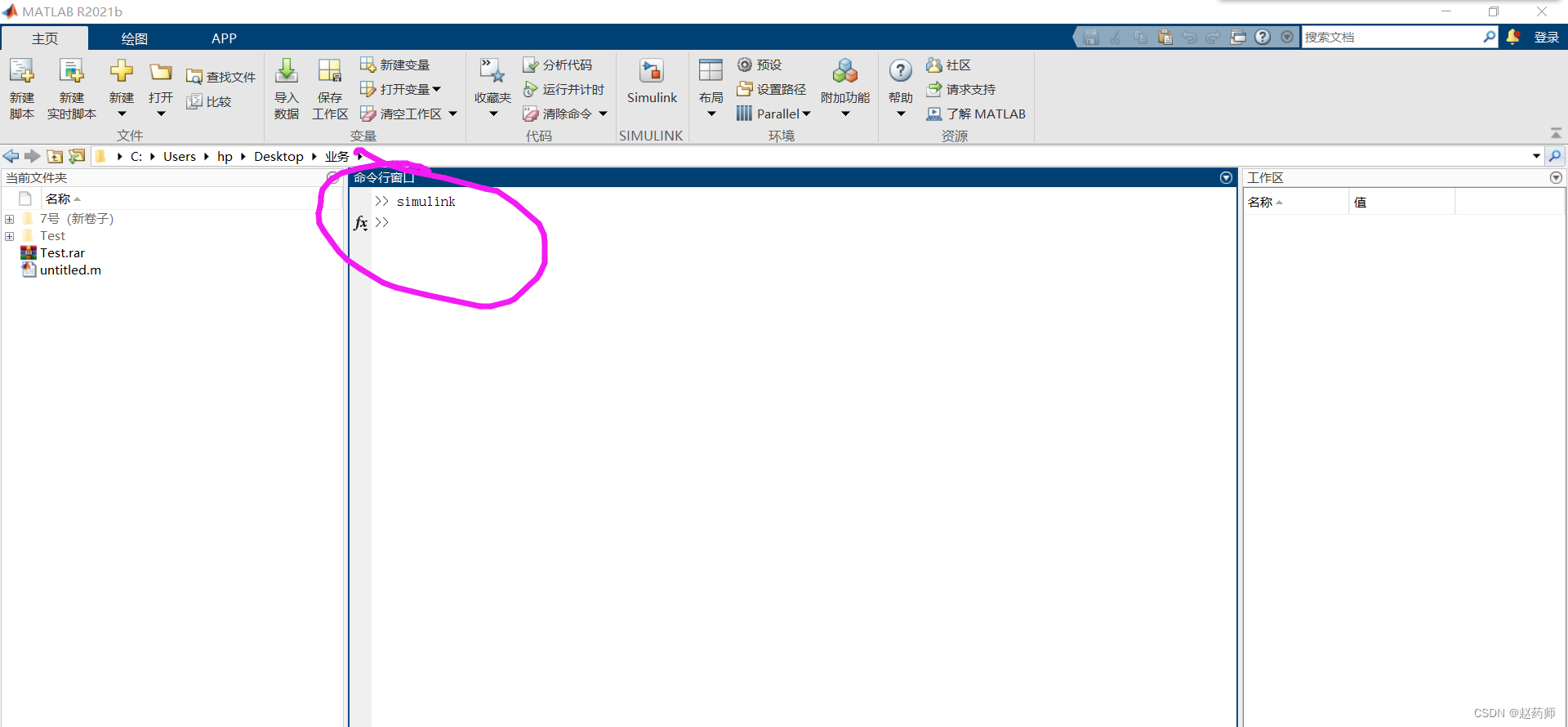
方式1
在MATLAB的命令行窗口输入“Simulink”命令。
方式2
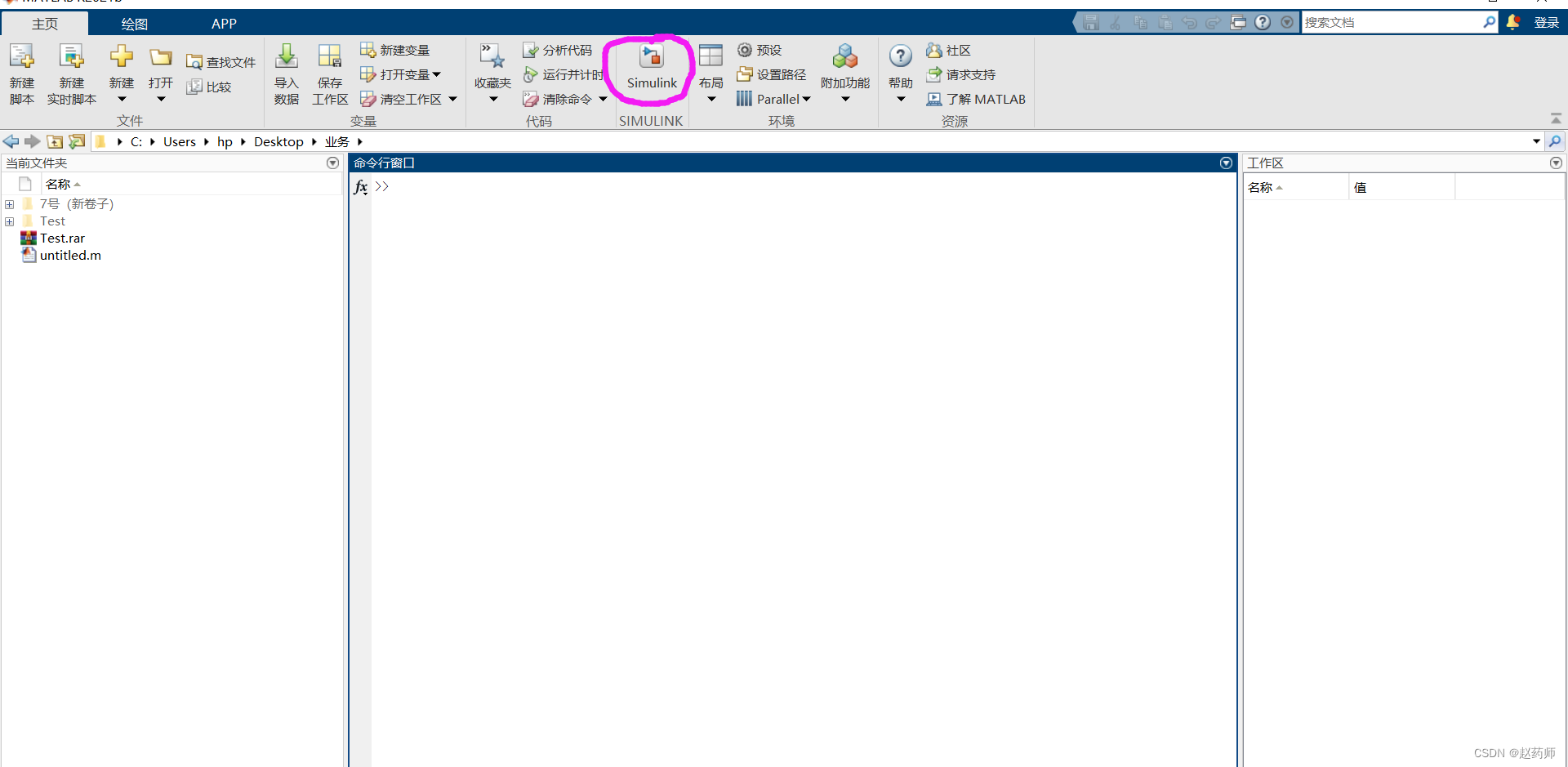
在MATLAB主窗口的“主页”选项卡中,单击“SIMULINK”命令组中的Simulink命令按钮。
方式3
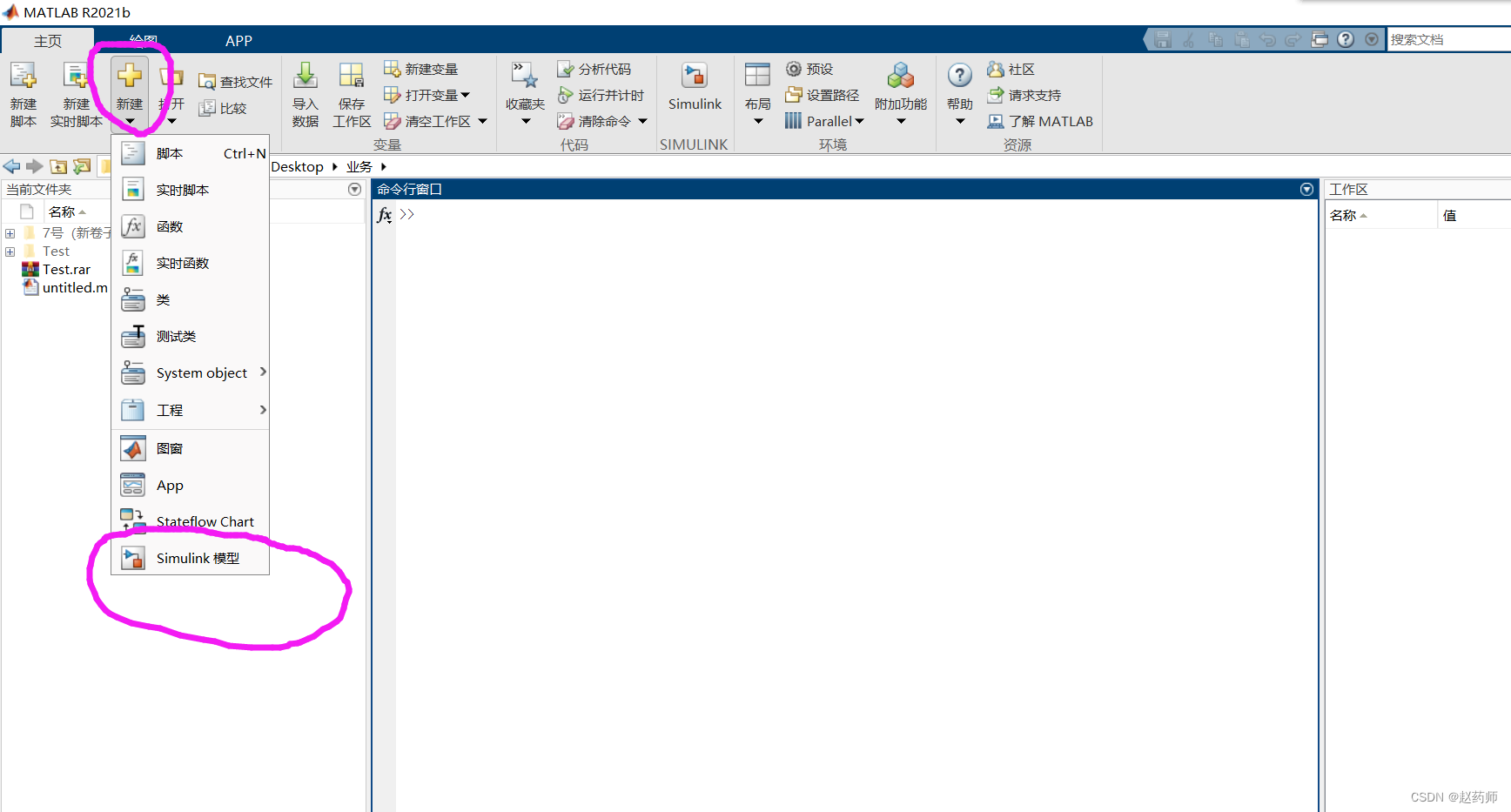
从MATLAB主窗口的“主页”选项卡选择“文件”命令组中的“新建”命令按钮,然后从下拉菜单中选择“Simulink Model”命令。
二、创建或打开模型
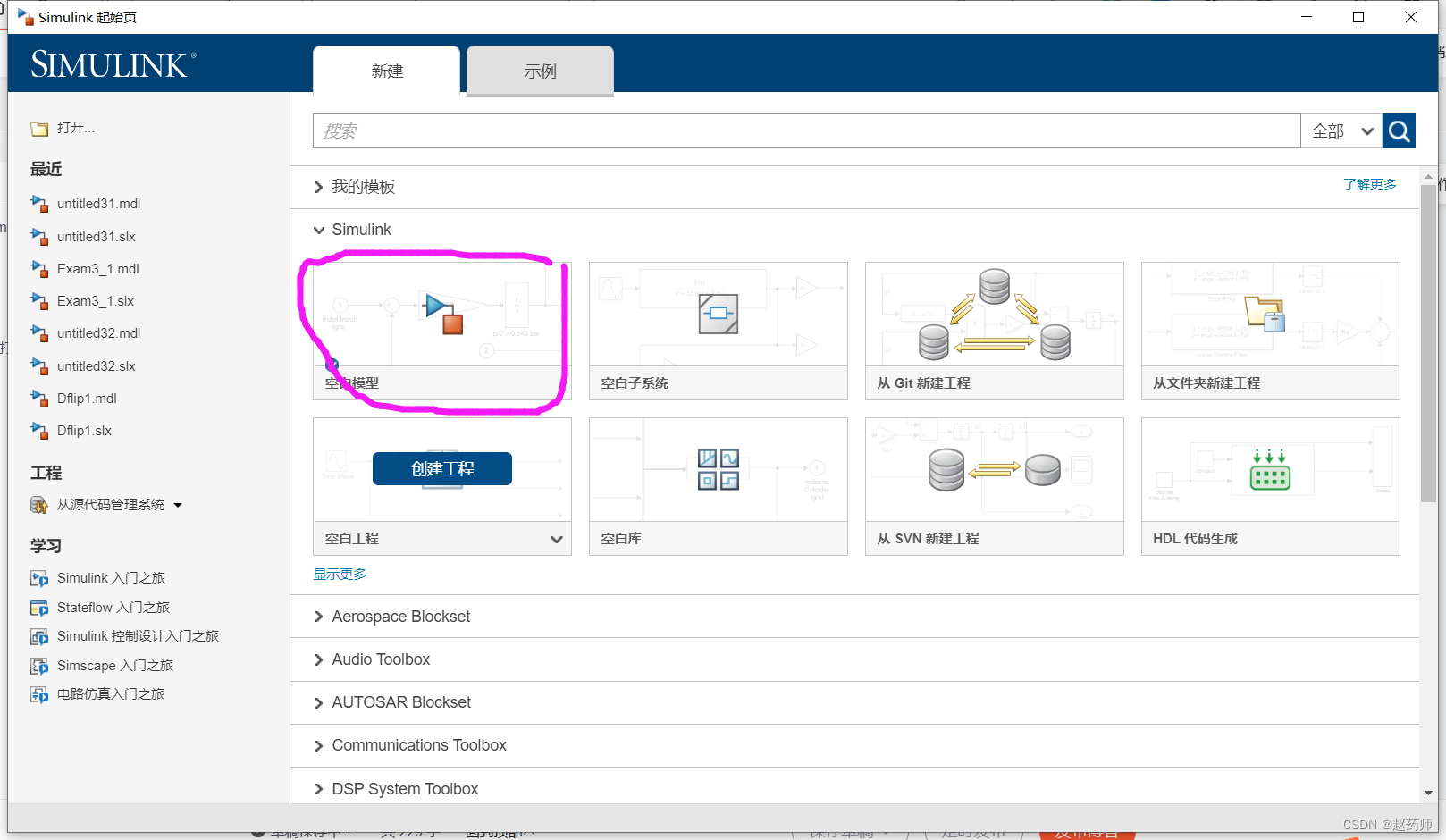
1.创建模型
在Simulink起始页,单击“Blank Model”按钮,创建一个新的空白模型
2.打开模型
如果需要打开已有的模型,可以直接在MATLAB地址栏中导入工程路径,找到并双击.slx文件、或.MDL文件
三、搭建模型
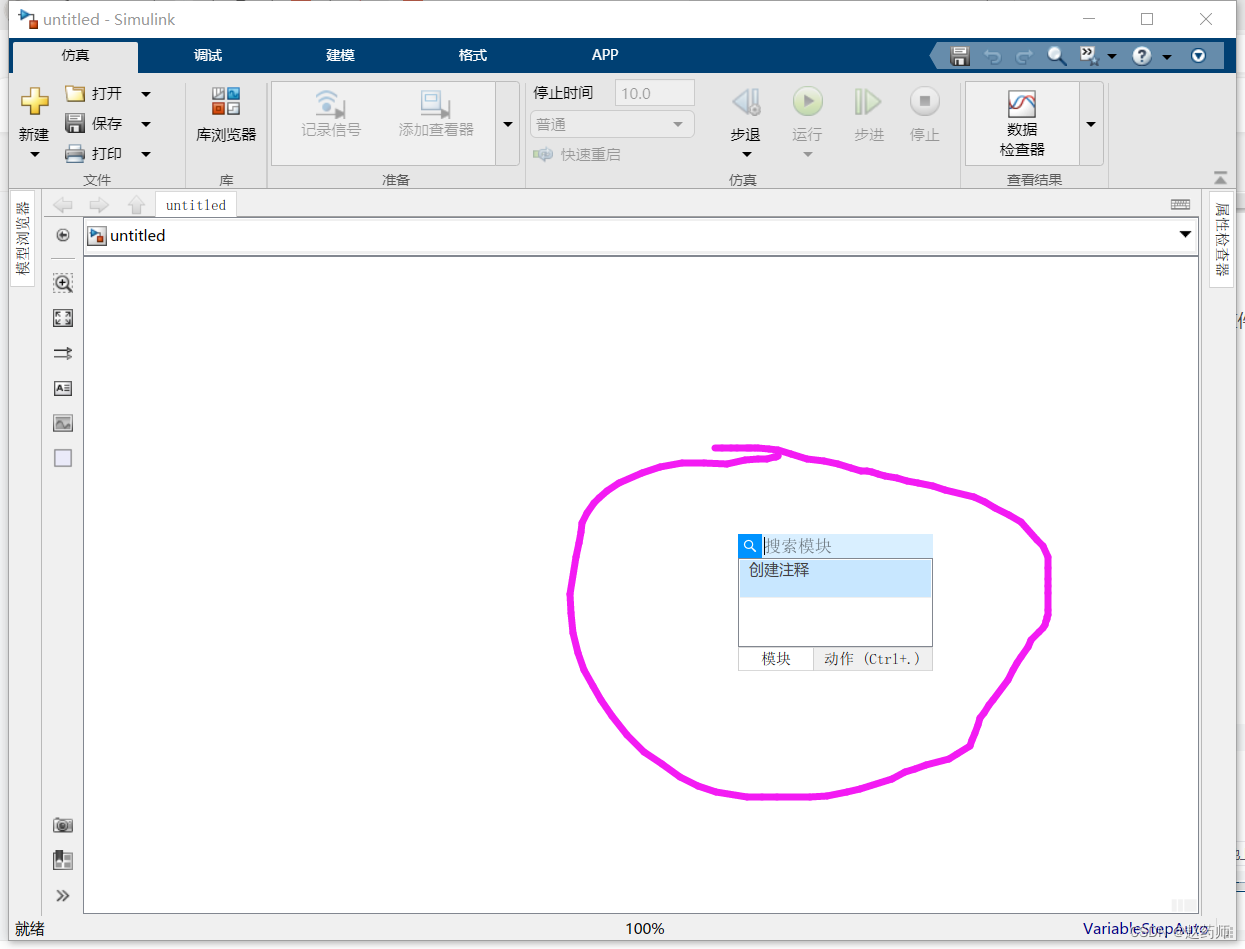
3.1模块引入
方式1
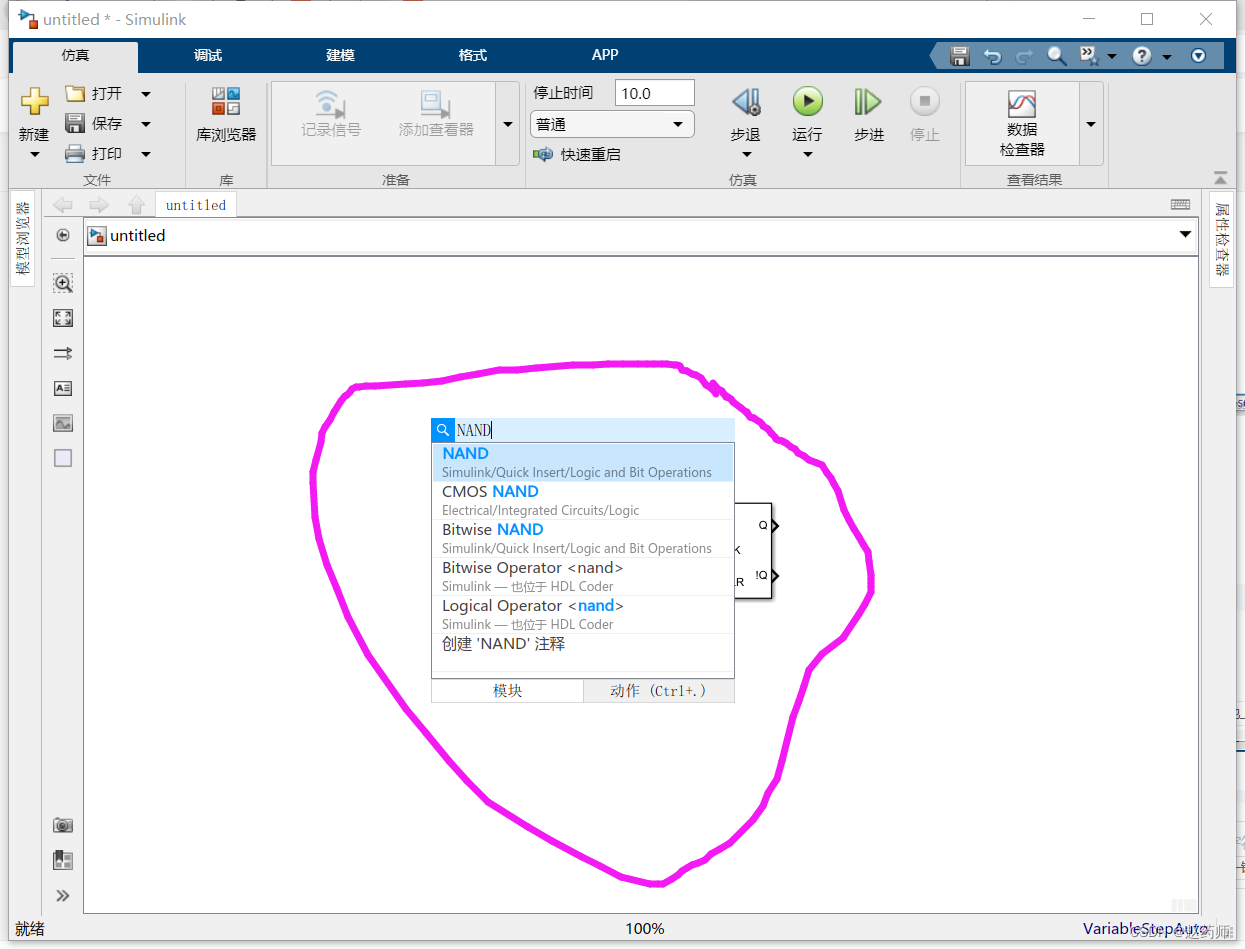
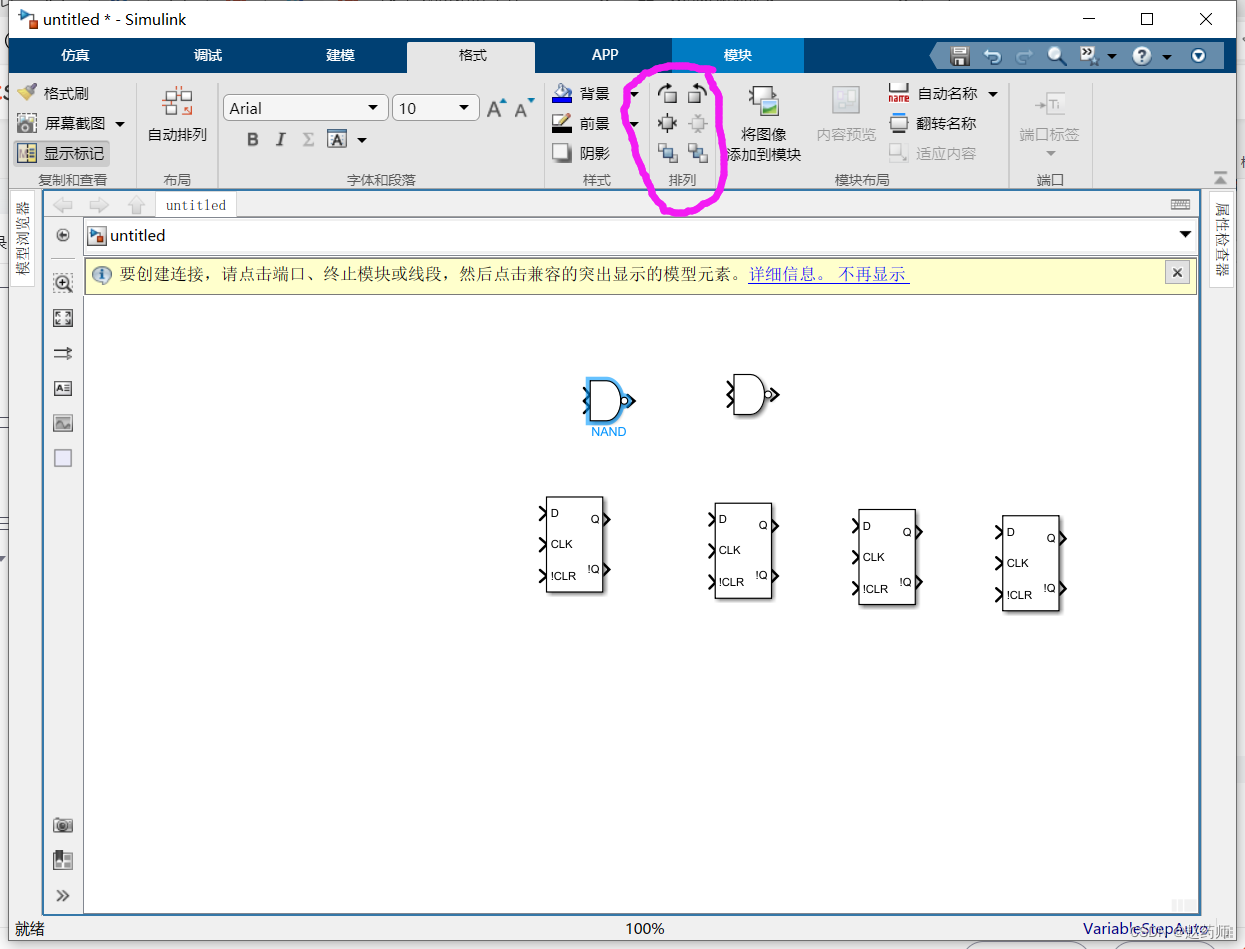
双击空白区域、输入元器件的名称、触发器叫flip、与非门叫NAND
输入flip,会显示各种触发器,jk触发器,SR触发器,D触发器等
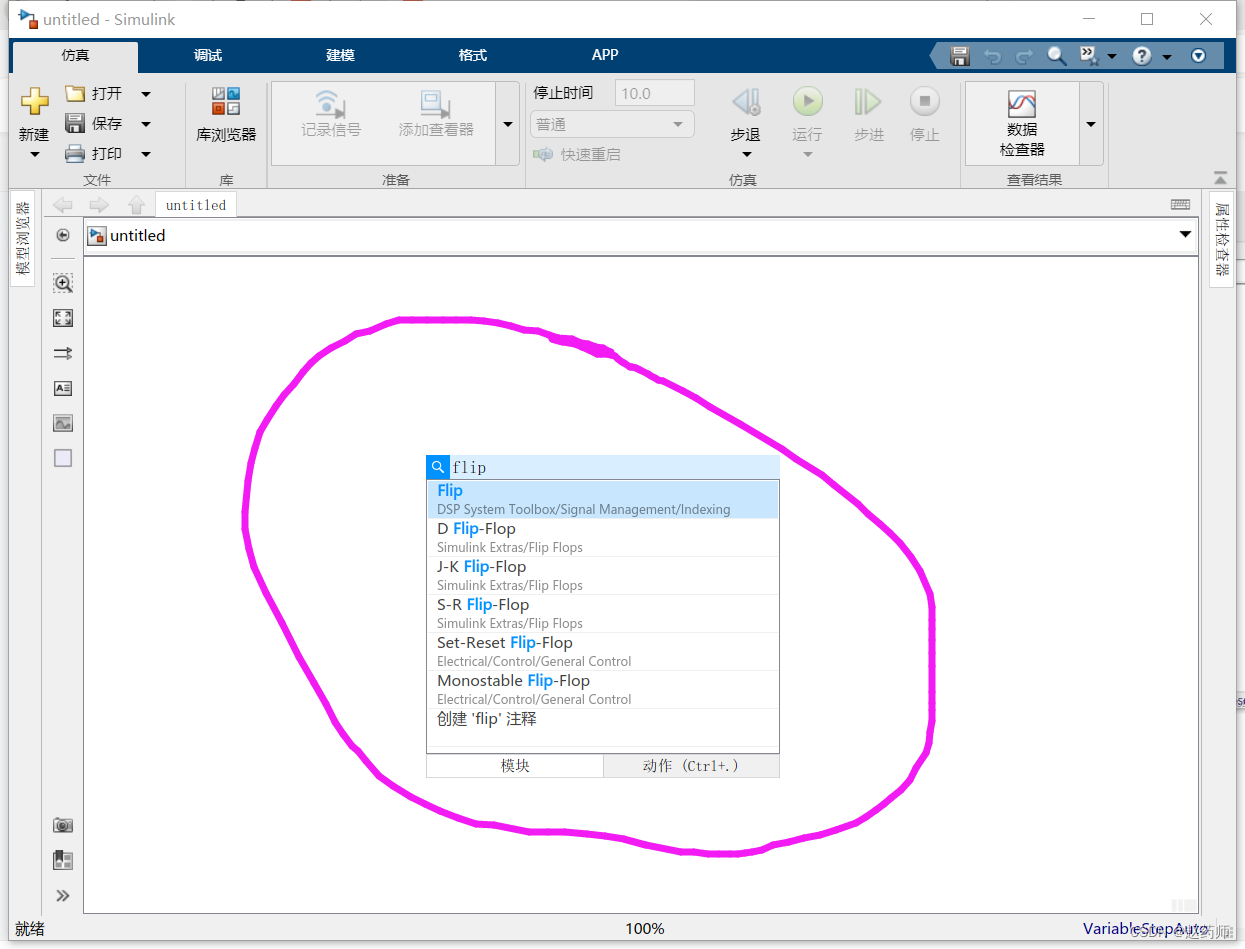
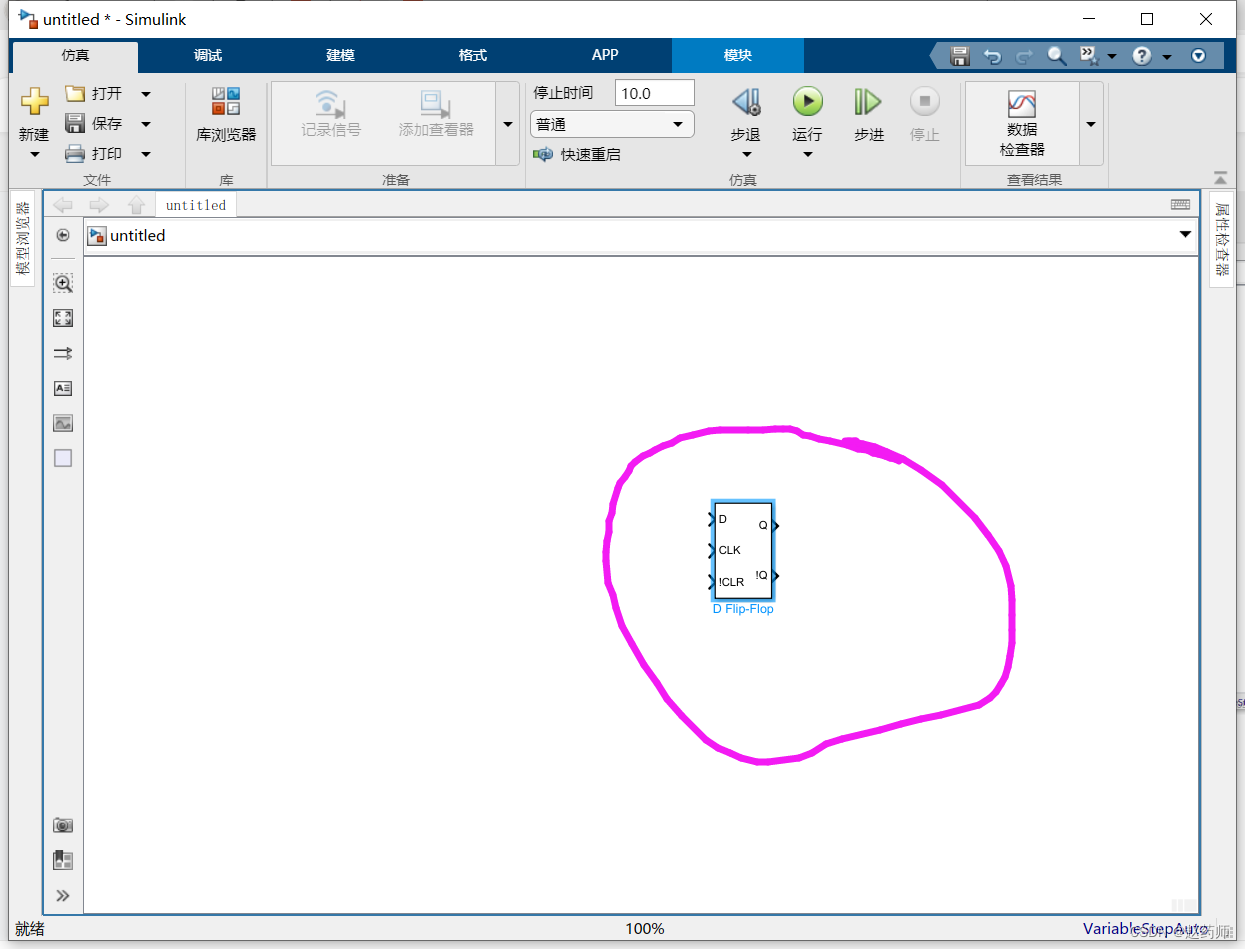
选择想要的触发器后,就会出现在屏幕上了
方式2
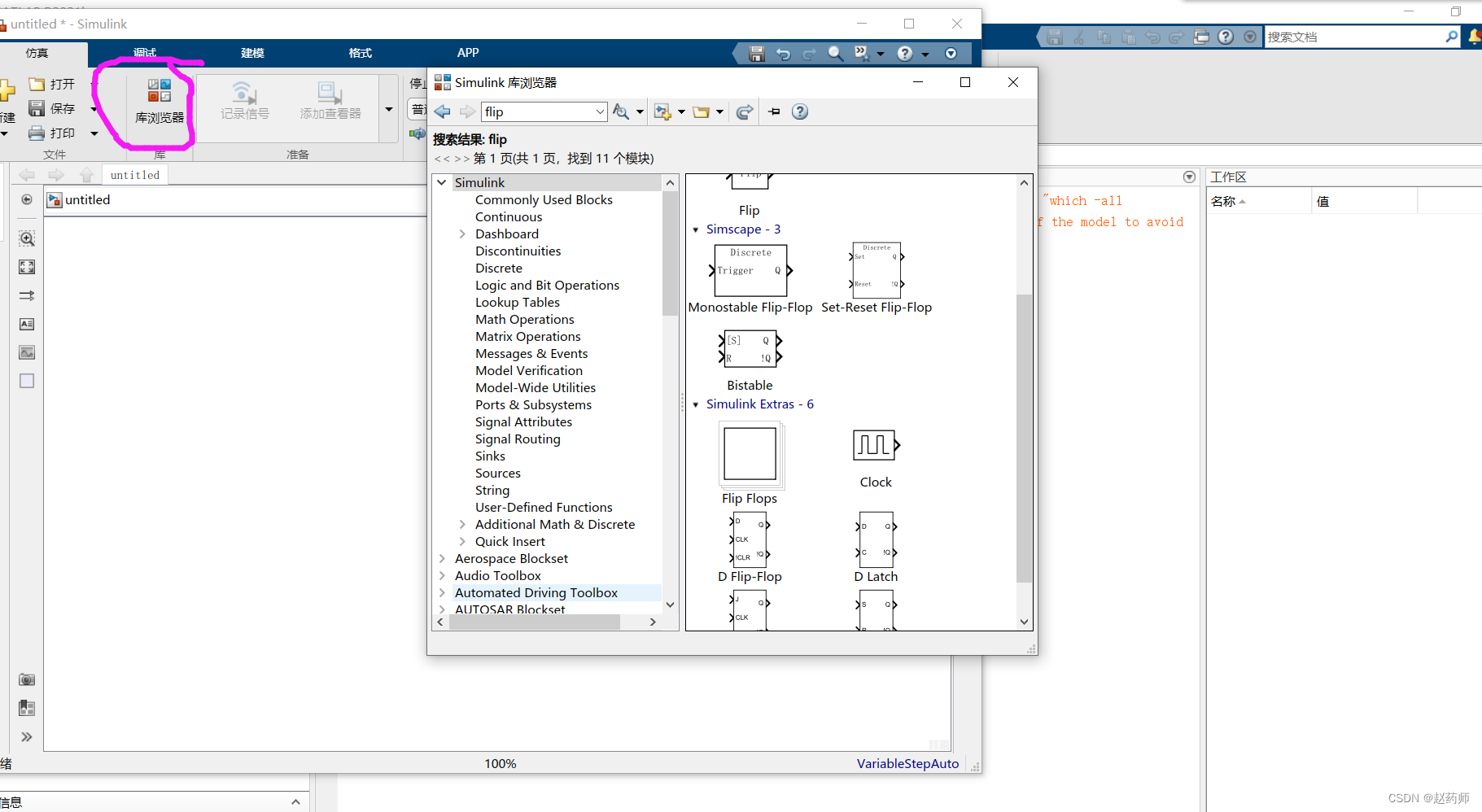
去库浏览器中搜索,选择想要的元器件,拖入空白区域
三、连接电路
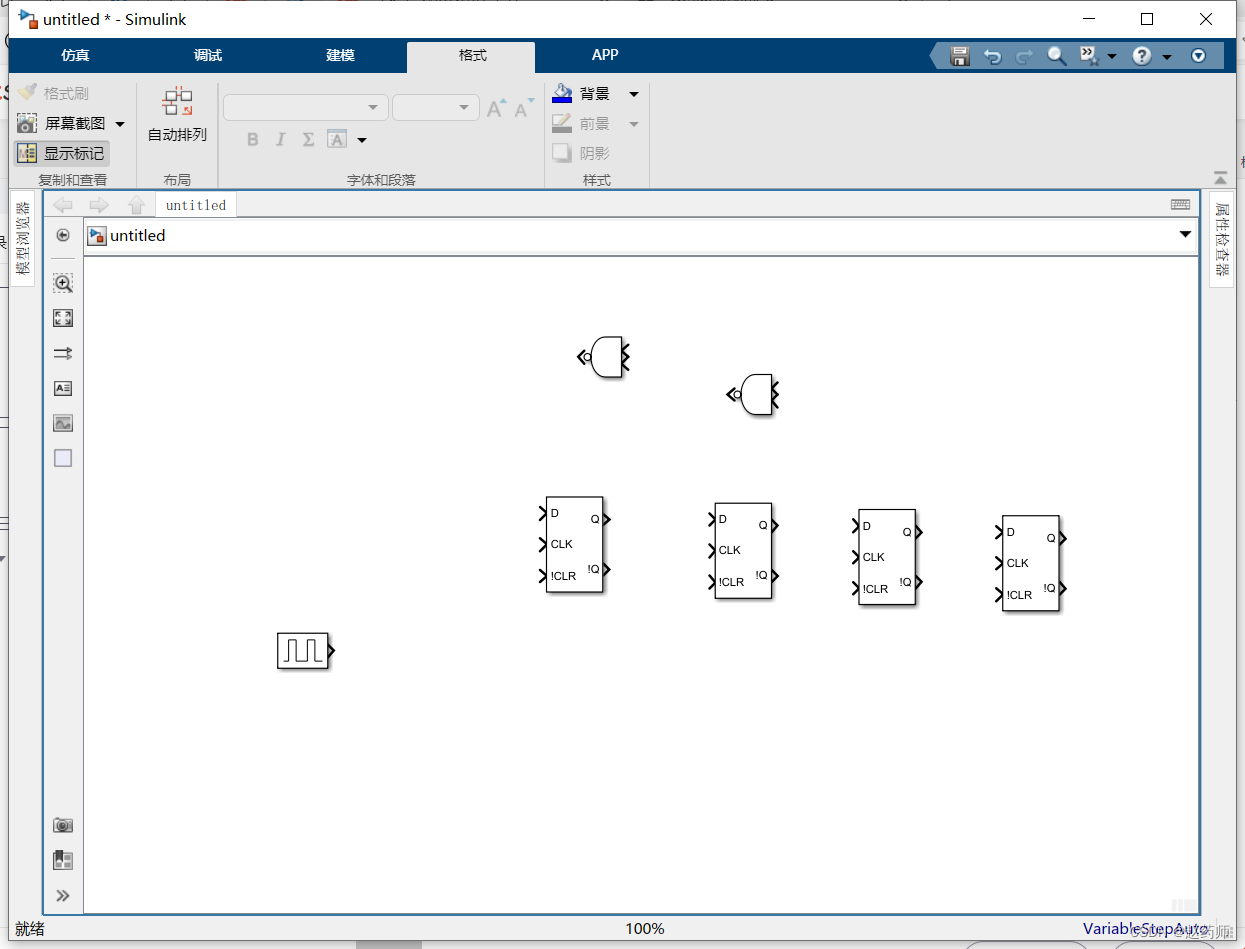
按照步骤二中、搜索clock、NAND、flip等将元器件都放好、并旋转方向使其指向合适的方向
按电路图连接
鼠标点点点就行
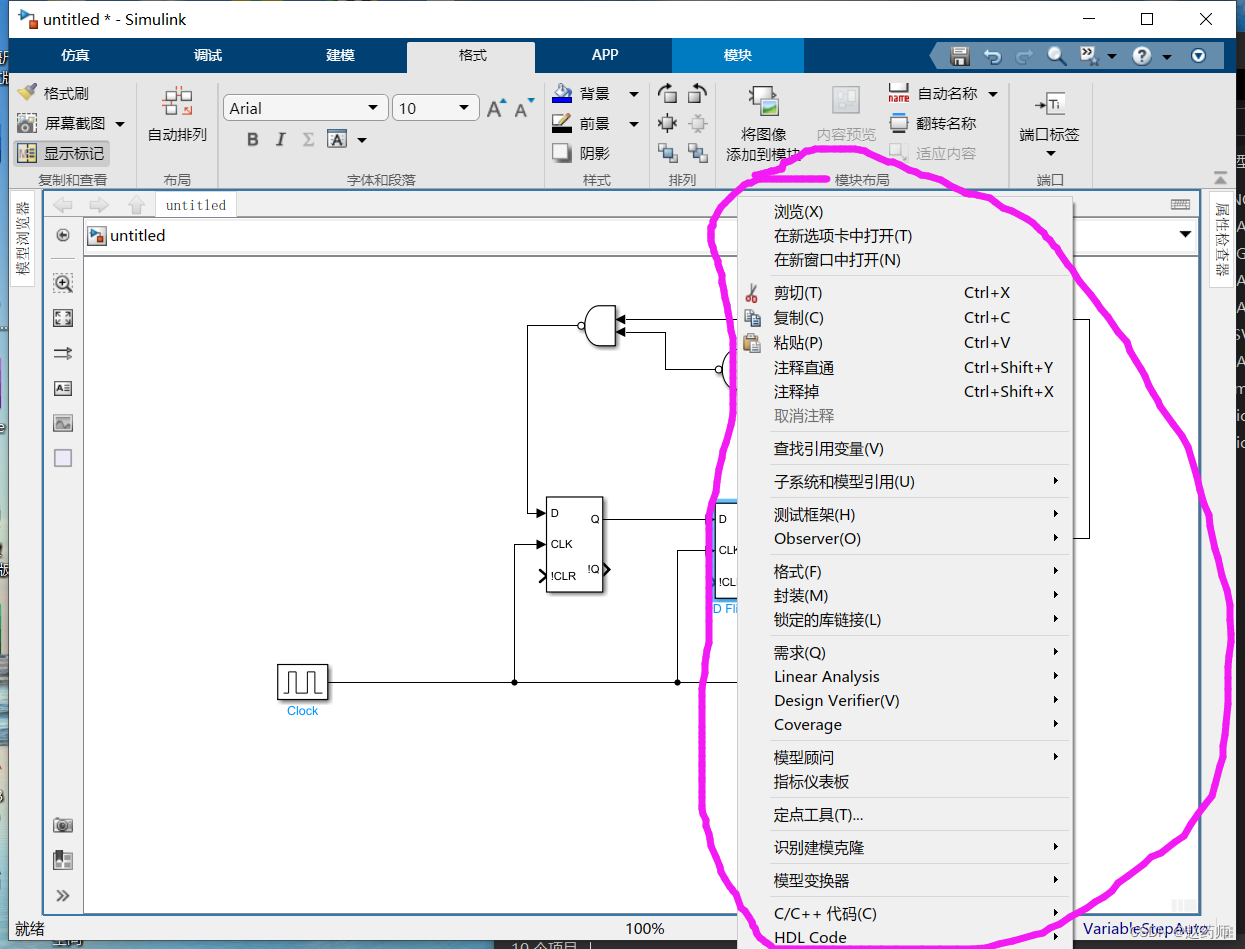
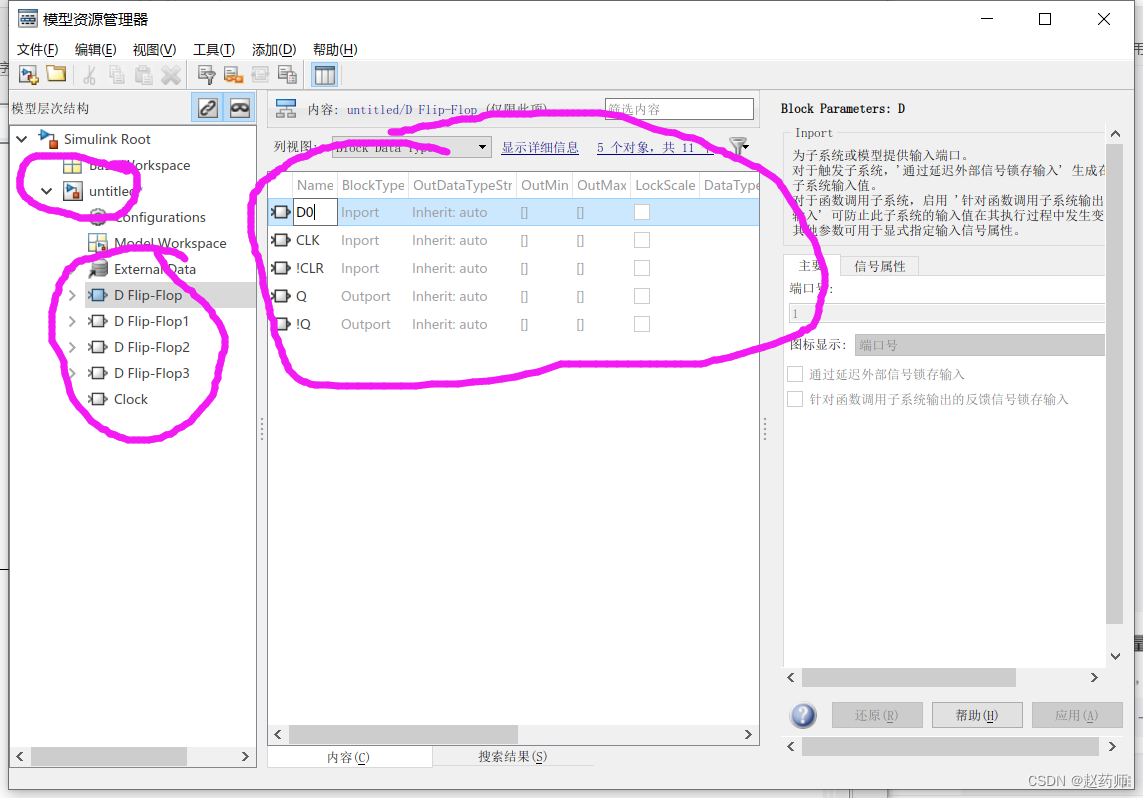
元器件改名
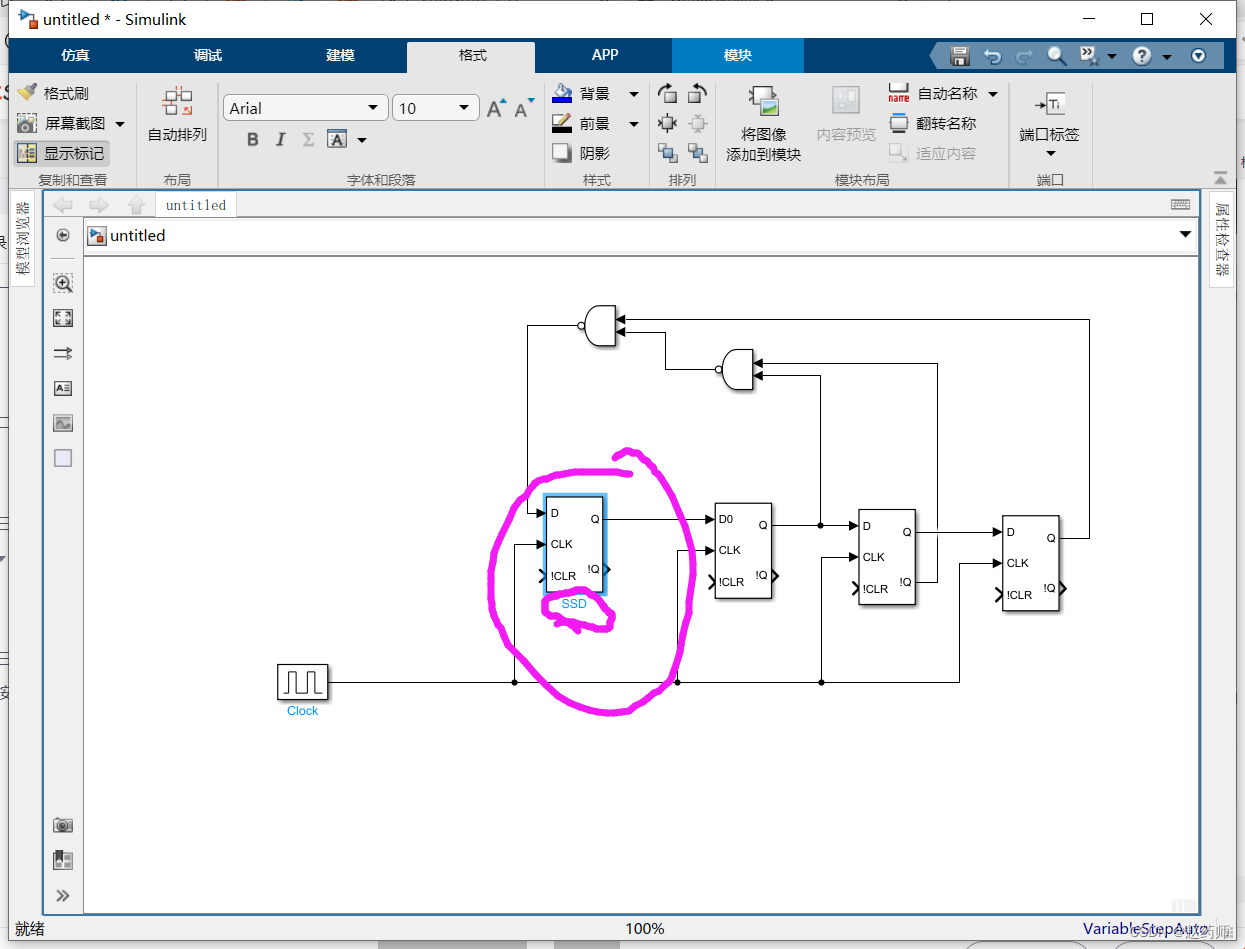
接口改名
点击任意元器件或任意空白位置,点击浏览
在整个过程中,建议参考相关的Simulink教程、文档和案例,以加深对Simulink的理解和掌握。同时,注意保持模型的清晰和整洁,避免不必要的复杂性和混乱。
四、总结-Simulink绘制电路的好处
Simulink在绘制电路时具有显著的优势,这些优势主要体现在以下几个方面:
- 图形化建模与易读性:
- Simulink使用图形化的建模方式,通过鼠标拖放不同的模块库中的系统模块,并将它们连接起来,即可迅速建立动态系统模型。
- 与传统的编程方式相比,这种图形化建模方法不需要编写大量代码,降低了建模的复杂度,提高了工作效率。
- Simulink模型比C代码具有更好的可读性,使得模型的管理和传承更为方便。即使在团队有人离职的情况下,由于模型的直观性,其他成员也能更容易地理解和接手工作。
- 智能化仿真与高效性:
- Simulink的仿真建立和运行过程智能化。用户只需设定仿真精度,软件会自动选择能保证精度的最大步长,从而实现高效仿真。
- 一个或多个Simulink模块可能包含几十、上百甚至更多行的代码功能,因此能以更小的体积传递更大的信息量。
- Simulink还可以将模型直接下载到快速控制原型设备(RCP)中,以原型控制器的形式去控制真实的被控对象,快速验证算法的有效性。
- 丰富的模块库与扩展性:
- Simulink提供了丰富的模块库,包括输入信号源、动力学元件、代数函数和非线性函数、数据显示模块等,可用于构成各种不同种类的动态模型系统。
- 用户还可以根据自己的需求定制模块元件和用户代码,将C、FORTRAN、Ada等代码直接植入Simulink模型中,从而扩展仿真环境的功能。
- 精确性与调试便利性:
- Simulink具有优秀的积分算法,给非线性系统仿真带来了极高的精度。先进的常微分方程求解器可用于求解各种类型的系统,确保仿真结果的准确性。
- Simulink还提供了图形化的调试工具,方便用户对系统进行开发、测试和调试。
- 层次化建模与模块化设计:
- Simulink支持分层次的表达复杂系统,各种模块可以组织成若干子系统,使得体积庞大、结构复杂的模型构建也简便易行。
- 这种模块化设计方式不仅提高了建模的灵活性,还有助于实现代码的复用和系统的模块化测试。