系列文章目录
【附带源码】机械臂MoveIt2极简教程(一)、moveit2安装
【附带源码】机械臂MoveIt2极简教程(二)、move_group交互
【附带源码】机械臂MoveIt2极简教程(三)、URDF/SRDF介绍
目录
- 系列文章目录
- 1. URDF
-
- 1.1 URDF相关资源
- 1.2 小技巧
-
- 1.2.1 关节名称
- 1.2.2 安全限制
- 1.2.3 碰撞检测
- 1.2.4 测试URDF
- 1.3 URDF例子
- 2. SRDF
-
- 2.1 虚拟关节
- 2.2 被动关节
- 2.3 组
-
- 2.3.1 关节组
- 2.3.2 连杆组
- 2.3.3 Serial Chain
- 2.3.4 组的集合
- 2.4 末端执行器
- 2.5 自碰撞
- 2.6 机器人姿态
- 2.7 SRDF文件说明
- 3. 加载URDF和SRDF
在移动机器人中,一般只需要URDF(Unified Robot Description Format)模型描述文件就够了,但是在机械臂操作中,仅仅一个URDF不够,还需要SRDF(Semantic Robot Description Format)。你可以把URDF理解成乐高里面的积木和说明书,有了它,你就可以搭出一个机器人。而SRDF则更像详细说明书。
1. URDF
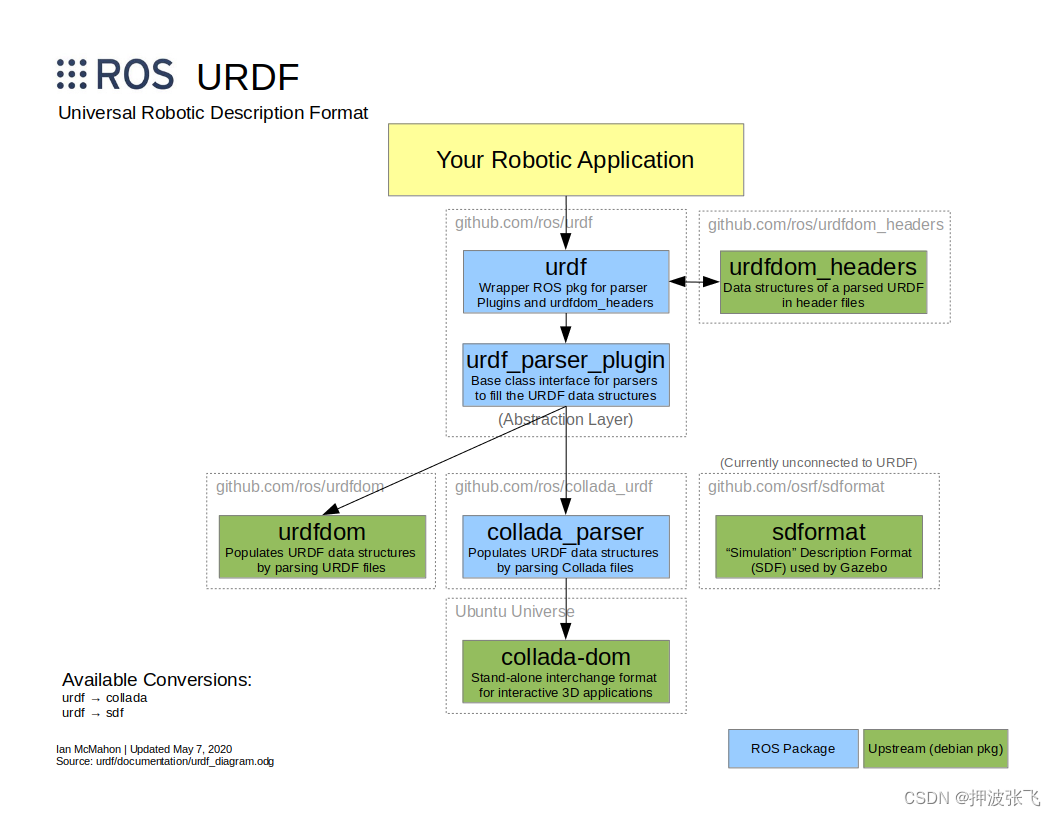
MoveIt2从URDF中导入一个机械臂,URDF是ROS1\ROS2通用的机器人模型描述格式。
1.1 URDF相关资源
URDF ROS 维基百科:网址链接
URDF教程:网址链接
solidworks URDF插件:网址链接 你可以通过solidworks导出一个URDF的机器人模型。
1.2 小技巧
下面有几个注意事项,确保你生成的URDF手册能够在moveit2中使用。
1.2.1 关节名称
关节名称不应该包含特殊字符 -,[,],(,),
1.2.2 安全限制
机器人关节限位。机械臂的每个关节并不是都能做360°旋转的,就像人的关节一样。因此必须在URDF手册里写明每个关节所对应的限制条件。
举个例子:
<safety_controller k_position="100" k_velocity="1.5" soft_lower_limit="-2.857" soft_upper_limit="2.857"/>
soft_lower_limit和soft_upper_limit描述了该关节的关节位置限制。moveit2将会把这两个参数和hard limits进行对比,选择最保守的值来运行机器人模型。
soft_lower_limit和soft_upper_limit如果是0.0,那么该关节无法旋转移动了。所以每个参数要设置的很合理。
1.2.3 碰撞检测
MoveIt2使用网格来进行碰撞检测。(就是我们常说的栅格地图中的栅格)
URDF允许可视化和碰撞检测的栅格分开设置。通常来说,可视化栅格会更加具体,也更好看,但是碰撞栅格就会简单一点。当检测机械臂连杆是否碰撞时,网格中三角形的数量影响碰撞检测的耗时。一般整个机器人的三角形数量控制在几千个左右。
1.2.4 测试URDF
ROS的URDF包提供了check_urdf工具,可以用来检测你写的URDF文件是否正确。
sudo apt install liburdfdom-tools
check_urdf pr2.urdf
打印信息如下:
robot name is: pr2
---------- Successfully Parsed XML ---------------
root Link: base_footprint has 1 child(ren)
child(1): base_link
child(1): base_laser_link
child(2): bl_caster_rotation_link
child(1): bl_caster_l_wheel_link
child(2): bl_caster_r_wheel_link
child(3): br_caster_rotation_link
child(1): br_caster_l_wheel_link
child(2): br_caster_r_wheel_link
child(4): fl_caster_rotation_link
child(1): fl_caster_l_wheel_link
child(2): fl_caster_r_wheel_link
child(5): fr_caster_rotation_link
child(1): fr_caster_l_wheel_link
child(2): fr_caster_r_wheel_link
child(6): torso_lift_link
child(1): head_pan_link
child(1): head_tilt_link
child(1): head_plate_frame
child(1): sensor_mount_link
child(1): double_stereo_link
child(1): narrow_stereo_link
也可以可视化输出
urdf_to_graphiz pr2.urdf
会输出有个pdf文件,列出了所有模型信息。
1.3 URDF例子
在ROS社区,有很多的URDF例子可以让你去学习和参考:网址
pr2机器人:适配ros melodic和noetic版本
2. SRDF
SRDF详细配置了关节组,包括默认的机器人配置、碰撞检测信息、机器人位姿变换等。推荐的生成SRDF方式是利用MoveIt Setup Assistant。
2.1 虚拟关节
URDF只描述了机器人的物理关节。但是虚拟关节也是需要的。因为在世界坐标系中,常常要定义机器人连杆之间的位姿变换。对于移动机器人,比如pr2机器人,会有一个灵活可变的虚拟关节连接着机器人和世界坐标;对于固定工业机械臂,会有一个固定虚拟关节连接机械臂和世界坐标。
其实就是world到base_link的关系。
2.2 被动关节
被动关节就是机器人中非驱动的关节。比如移动机器人里面除了差分驱动轮连接的关节以外,都是被动关节。被动关节是在SRDF里面单独设置的,确保他们在运动规划和控制流程中无法被直接控制。
2.3 组
MoveIt2中有一个核心概念:Group(组)。有时叫关节组,或者规划组。组包含多个关节和连杆的集合。
所有的运动规划与控制都是以组作为基本单元进行控制。
2.3.1 关节组
一系列关节组成的组。
每个关节的child link都默认包含在组中。
2.3.2 连杆组
一系列连杆组成的组。
这些连杆的parent joint也会包含在组中。
记忆:一个joint和它的子link是一个整体。
2.3.3 Serial Chain
serial chain是由base_link和tip link以及中间多个关节、连杆组成。头是base_link,尾巴是tip link。
2.3.4 组的集合
组和组之间也可以进行集合,形成更大的组。
2.4 末端执行器
机器人中的某些特定组叫末端执行器。它一般是通过固定关节连接到手臂上。
2.5 自碰撞
默认的自碰撞矩阵生成器会搜索机器人link坐标系上其他的成对links,目的是为了防止碰撞检测,降低运动规划处理时间。当这些成对的links处在碰撞中、未发生碰撞、在默认位置碰撞、相邻连杆条件下,是无法使能的。采样密度规定了检测自碰撞时需要有多少个机器人位姿。高采样密度会耗算力;低采样密度可能会造成关节有更大可能性被禁用。默认值是10000个碰撞检测。
2.6 机器人姿态
SRDF存储了机器人的固定配置。配置都会自带一个字符串类型的id用以区分。id也会被用来恢复配置。
2.7 SRDF文件说明
通用的文件格式如下:
<?xml version="1.0"?>
<!-- This does not replace URDF, and is not an extension of URDF.
This is a format for representing semantic information about the robot structure.
A URDF file must exist for this robot as well, where the joints and the links that are referenced are defined -->
<robot name="some robot"
![[AI Omost] 革命性AI图像合成技术,让你的创意几乎一触即发!](https://img-blog.csdnimg.cn/img_convert/d14e184357f67e0865c0dd44974f0ef1.png)







![[2024-06]-[大模型]-[DEBUG]- ollama webui 11434 connection refused](https://img-blog.csdnimg.cn/direct/b3e2eea302d64b04a52afde4f26d32c2.png)
