前言:
” 接上篇,https://t.zsxq.com/19UoFe33k,本文是整理的关于《美国纽约摄影学院 摄影教材》这本书,第一单元 - 第3课 - 如何使用照相机,课后习题及解答。“
1、对于一架典型的单镜头反光照相机,取景时镜头光圈总是开至最大,以获得最明亮的影像,即使拍摄时所需设置的镜头光圈较小。
要解释此问题,要先了解一下单反相机的结构,如下图所示:
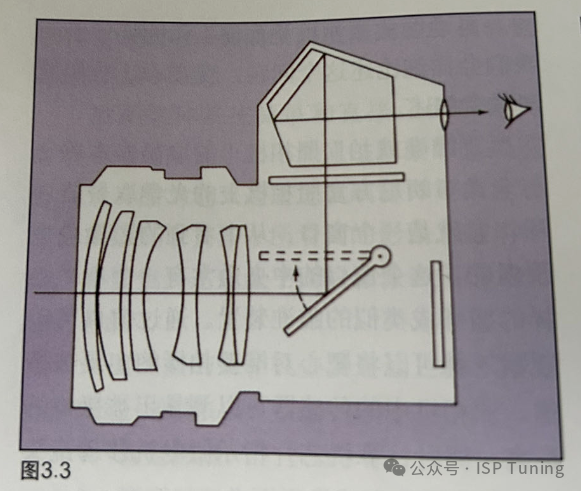
该系统中心是一个活动的反光镜,它呈45度角安放在胶片/影像传感器的前面,进入镜头的光线会由反光镜向上反射到五棱镜上,
随后进入人眼,这样摄影者就可以从取景器中直接观察到通过镜头的影像。因此,可以准确地看见与在成像平面上相同的影像。
从如上结构中可以知道,取景时进入照相机的光线并没有到达胶片/影像传感器使其曝光,而只有在按下快门按钮的时候,
反光镜迅速向上翻起并不阻挡光路,同时快门打开,才能让光线到达胶片/影像传感器进行曝光。
但当想使用f/16这样的小光圈进行拍摄时,因为光圈小,进入的光线是微弱的,所以取景器中看到的影像也是暗淡的,甚至根本无法正确对焦,要如何解决此问题呢?
为了方便构图和聚焦,我们总希望在取景屏上看到最明亮的影像,所以在实际工作(取景和聚焦)中,照相机的镜头总是将光圈升至最大,
当我们对取景器中看到的影像满意时,会按下快门按钮,此时,镜头的光圈会收缩至预设的光圈,在曝光完成的瞬间,光圈又会开到它的最大光圈值。
所以此题描述的“取景时镜头光圈总是开至最大,以获得最明亮的影像,即使拍摄时所需设置的镜头光圈较小”是正确的。
2.拍摄人物肖像时,最佳聚焦点是被摄对象的鼻子尖。
此题描述有误,拍摄人物肖像时,应该聚焦在人脸上最重要的部位上,那就是眼睛。
关于摄影的3个基本原则是:
a、一幅好照片要有一个鲜明的主题/主体
b、一幅好照片必须能把注意力引向被摄主体
c、一幅好照片必须画面简洁
所以拍摄人物肖像时,更能展现人物主题感的,那肯定就是眼睛了。
另外再补充关于手动调焦的方法(即调零),比如向一个方向转动镜头,仔细关注取景的影像,它会变的越来越清晰,直到获得最大清晰度的某一点,
超过该点影像又会开始变得模糊。此时再向相反的方向稍微转动镜头,并且反复操作,直至对准清晰度最大的那一点。在此点上,被摄体聚焦最为准确。
3.对于一只确定的镜头,f/11比f/4的景深更大。
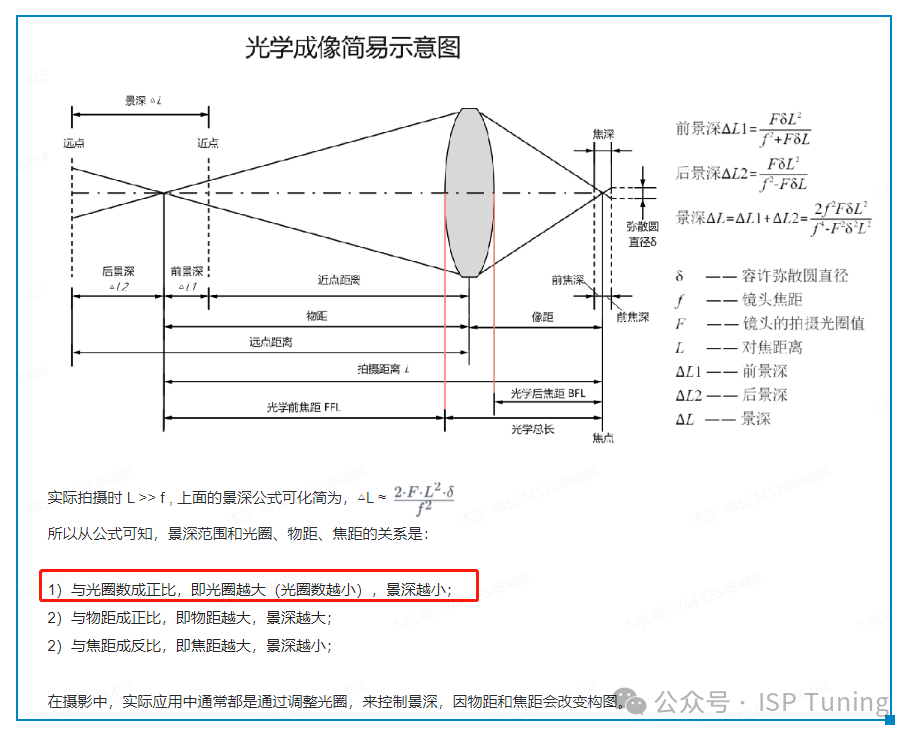
上图是之前总结过的一篇关于景深计算的公式(https://t.zsxq.com/pXIbI),所以f/11比f/4的景深更大,此题描述是正确的。
4.对于一只确定的镜头,聚焦20英尺时的景深比聚焦10英尺时的景深更大。
基于上题的景深公式,此描述是正确的,聚焦距离的远近可以控制景深大小,聚焦距离越远,也就是物距越大,则景深越大。
5.对于大多数光圈和中等的拍摄距离,向焦点前后扩展的景深范围是相同的距离。
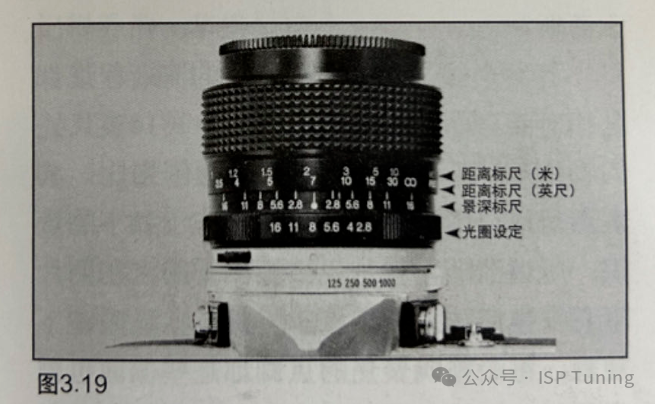
在图3.19中可以看到,距离标尺显示镜头聚焦在7英尺(即2米多一点),而光圈标尺表明光圈设置为f/8。
所以上图中的景深标尺它告诉我们,使用这只镜头并以f/8的光圈聚焦在7英尺(即2米多一点)的距离时,景深的范围大约是4.8-15英尺(1.4-4.5米);
假设镜头聚焦位置不变,调整光圈到f/11,我们就要关注标尺两边的数字11,并且看到的景深范围大约是1.2-10米;
所以此题描述的是错误的。
6.景深范围内从前到后所有各点都是同等清晰。
所谓清晰,就是说被摄物体上的点在照片里看来也应该是一个点。
但是在显微镜下观察,每个精确聚焦的点却都是些像面包圈样的微小圆环。这种圆环非常之小,所以肉眼看来似乎是一个点。
如果被摄物体的某点稍微有些模糊,那么在显微镜下这个点就会像一个稍微有些大的面包圈。
但人眼来看仍像是一个点,那么我们就说其清晰程度还是可以接受。
当这些点距离焦平面越来越远时,他们对应的面包圈就会逐渐变大,直至人眼也能察觉得到他们不再像点,而是像微小的模糊圈。那么我们就说他们是模糊的。
所以景深,就是清晰度可以接受的一个区域。在上一题中,当聚焦在2.25m处,f/8光圈下对应的景深范围是1.4-4.5m,也就是1.4-4.5m范围内的物体都是可以接受的清晰度,
而比1.4m更近和比4.5m更远的物体则被认为是模糊的。但是,事实是只有正好在2.25m处的物体才是准确聚焦的,最清晰的点。
所以此题描述的“景深范围内从前到后所有各点都是同等清晰”的说法是错误的。
7.通过单镜头反光照相机取景器观看时,所看到的景深总是与记录在胶片上的景深完全一样。
在实际工作(取景和聚焦)中,为了看到最明亮的影像,照相机的镜头总是将光圈升至最大,当我们对取景器中看到的影像满意时,会按下快门按钮,
此时,镜头的光圈会收缩至预设的光圈,在曝光完成的瞬间,光圈又会开到它的最大光圈值。
所以在取景和实际拍照过程中,所使用的光圈大小是不一样的,取景时的用的是最大光圈,景深范围会很小,实际拍照时的景深范围肯定是要大于等于取景时的景深范围。
那如何保证在取景满意后,要拍的照片是在我需要的景深范围之内呢?有些单镜头反光相机上具有景深预测按钮。在取景器中聚焦场景之后,可以按下预测按钮,把光圈收缩到选定的光圈。
现在所看到的场景就与拍摄后所记录的场景一样了。这时可以仔细的检查背景,确保没有清晰的干扰物体存在。当对看到的一切感到满意时,就可以准备拍摄了。
8.可能获得的最大的景深范围的聚焦距离称作超焦距。
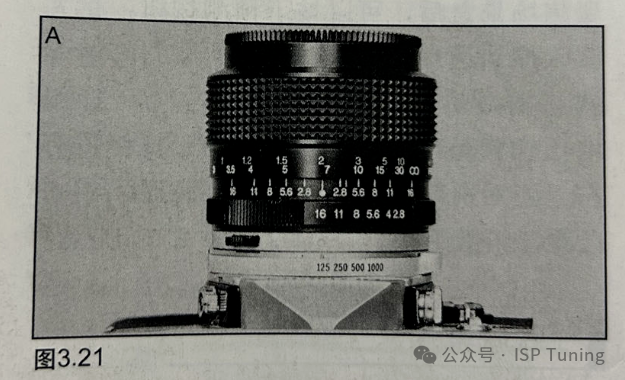
如果相机有如上图所示的景深标记的话,可以按如下步骤进行操作,首先,设置最小的光圈f/16。这样就为这只镜头提供了获得最大可能景深的机会。
其次,如图3.21所示,把无限远标志的中心对准景深标尺右边的数字16。这就使得无限远正好在景深范围内,并且是这只镜头光圈f/16上所能得到的最大景深。此时距离标尺所示的位置2m,就是这只镜头在f/16光圈的超焦距设置。
所以此题描述是正确的,当远景深位置刚好达到无限远时,此时对应的对焦距离便是超焦距。
9.单镜头反光照相机通常装有焦平面快门。
快门主要有两种类型:镜间快门和焦平面快门;
镜间快门由一系列薄钢叶片组成,放置在镜头的单元之间。快门释放按钮触发一根弹簧使叶片在曝光期间开启,然后闭合。
焦平面快门位于照相机里,正好在胶片或影像传感器的前面。由于它就在焦点平面,也就是胶片/影像传感器位置的前面,因此而得名。
焦平面快门有两个优点,首先,因为焦平面快门是装在相机里面的,而不是装在镜头里的,所以其可互换的镜头不是太昂贵。
但对于镜间快门来说,快门就是镜头的一部分。因此镜头相对比较昂贵。其次,焦平面快门能够具有更快的曝光速度。
所以此题描述“单镜头反光照相机通常装有焦平面快门”没什么问题,相机具体是安装焦平面快门还是镜间快门都是看其设计了。
10.使用较慢的快门速度拍摄朝向照相机运动的物体,与从左至右穿过视野运动的同一物体相比可保持更高的清晰度。
首先我们要了解,在拍摄运动物体时,只有当快门速度足够快时,才能够捕捉到高速运动物体清晰的瞬间画面。
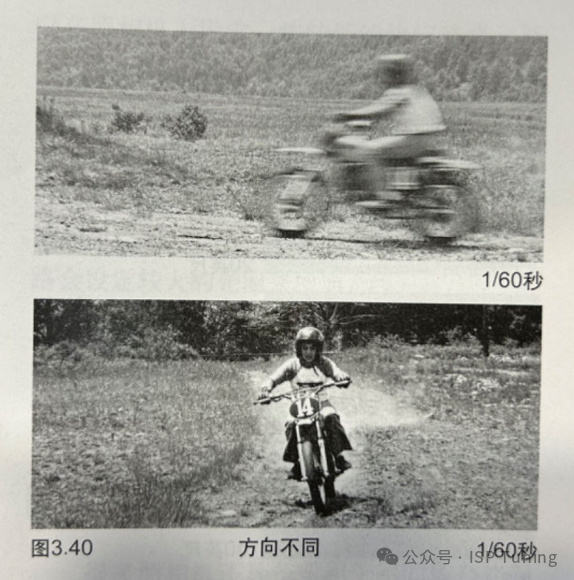
而当快门速度不够快时,捕捉到的则是运动物体的轨迹(物体的整个运动轨迹会在胶片/影像传感器上成像),如下图所示,成像出来就是模糊的。

所以当我们在拍摄运动物体时,具体要怎么选择快门速度,另外决定快门速度的因素又包含哪些呢?
拍摄运动物体时,快门速度的选择基于下面四个因素:
1)运动物体的速度
2)运动物体的方向
3)运动物体的距离
4)摄影镜头的焦距
1)运动物体的速度,我们需要选用的快门速度应该适合于物体的运动速度。定格逃跑的兔子所需要的快门速度肯定大大高于定格逃跑的乌龟的速度。
2)运动物体的方向,同样的快门时间,运动物体从左至右横穿过画面,似乎比该物体以同样的速度朝向或远离我们时的运动要快的多。那是因为物体运动方向的不同,导致成像在胶片/影像传感器上位移量的差异。
经过同样的时间,运动物体从左至右横穿过画面比朝向或远离我们时,对于在胶片上成像而已,其位移量是要大的,所以其运动速度也是要大的 ,所以拍出来的画面就更容易模糊。
3)运动物体的距离,照相机距离运动物体越近,物体留在胶片上的影像越大。胶片上的影像越大,其穿过画面就会越快,这时快门速度不够的话,拍出来的画面则是模糊的。
所以是距离运动物体越远,运动所引起的模糊程度越低,距离运动物体越近,运动所引起的模糊程度越高。
4)摄影镜头的焦距,镜头焦距越长,胶片上的影像越大,影像越大,其穿过画面就会越快。这时快门速度不够的话,拍出来的画面就更容易模糊。
所以此题描述的“使用较慢的快门速度拍摄朝向照相机运动的物体,与从左至右穿过视野运动的同一物体相比可保持更高的清晰度”是正确的。
另外再描述一下,如何拍摄出如下图中,运动人物主体是清晰的,但背景是运动模糊的这种具有动感效果的照片呢?

要保证运动主体(小男孩和狗)是清晰的,那就必须要保证运动主体和相机之间没有相对运动,所以在拍照时,相机要跟随运动主体一起去运动。
此时运动物体(小男孩和狗)相对于相机就是静止的,而背景则是运动的,就可以拍摄出如上效果的照片了。
这种拍摄方式叫做追随拍摄,追随拍摄成功的秘诀是尽可能早地让运动物体定位在取景器的中心,
拍摄者从臀部开始转动身体使相机做追随移动,让物体始终保持在取景器的中心,最后在适当的时机按下快门。拍摄之后,为了确保运动连续平滑,仍要保持一段追随拍摄的动作。
11.拍摄遥远的山脉景色时,如果手持照相机并至少使用1/60秒或更高的快门速度,那么总能获得令人满意的清晰影像。
如何得到令人满意的清晰影像?基于这个问题,可以先讨论一下拍摄时导致照片模糊的原因是什么。主要是两个原因:
1)聚焦不清晰,可能是聚焦位置不正确、或者光线太暗无法正确聚焦、也可能是光圈及拍摄距离调整的不正确,导致拍摄主体不在景深范围之内。
2)相机的震动,这是导致照片模糊的最常见原因,可能是由于按动快门按钮的方法不正确而产生(不均匀的手指压力、过大的压力以及猛然按动快门引起的震动),那具体要如何避免相机震动呢?
a、以足够高的快门速度进行拍摄,就能够消除任何明显的相机震动,具体是多高的快门速度呢?
经验法则:手持拍摄时,最慢速度的分母应该大约等于镜头焦距的毫米数。即手持50mm镜头拍摄时的快门速度应该不低于1/50秒,手持200mm镜头拍摄时的快门速度应该不低于1/200秒,依次类推。
但实际使用,建议给误差留有余地,至少以经验法则两倍的速度进行拍摄。即对于50mm镜头,快门速度不低于1/125秒;对于100mm镜头,不低于1/250秒,这样有助于确保得到最高的清晰度。
b、只要条件许可,就尽可能使用三角架去固定拍摄。
c、当既没有三脚架,也无法选择高快门速度时。比如说,由于照明条件的原因,只能使用1/30秒的快门速度,为了持稳照相机,可以将身体倚靠在固定物体上,比如墙壁、椅子、灯杆上,以此来获得最大的稳定性。
如果没有这些物体可以利用,那么可以撑住身体,使自己保持稳定。然后,将照相机紧靠在脸上,并让两肘贴紧身体,努力使胳膊、身体、头部和照相机形成一个整体。
稳固地把握住照相机,但也不要太使劲。如果提得太紧,肌肉会变得紧张并开始颤抖。因此,要牢固而又不紧绷。
准备就绪后,轻缓地按动快门按钮,不能突然猛按,并且让手指向下压住一会儿。
所以此题描述的:“拍摄遥远的山脉景色时,如果手持照相机并至少使用1/60秒或更高的快门速度,那么总能获得令人满意的清晰影像”
因为是快门时间比较长,而且是手持拍摄,会比较容易出现因为相机震动而导致拍摄模糊。
12.使用天光镜不会使影像受到损失。
这里先要介绍一下什么是天光镜,它是一种非常浅的品红色滤光镜,其真实作用是降低紫外光线,
第二个作用是保护镜头,但也只是装在镜头前面,来防护镜头表面的划伤,因为它比较便宜,所以划伤了也没关系。
但它是一块具有厚度、质地和两个表面的玻璃。所以会降低到达胶片/影像传感器的影像清晰度。
而且也会增加眩光的发生机率。在镜头上增加天光镜(或者任何其他滤光镜),就是额外增加了能够产生眩光的两个表面。所以此题描述是错误的。
13.如果照片上所有景物都不清晰的话,那么很可能是照相机震动所造成的。
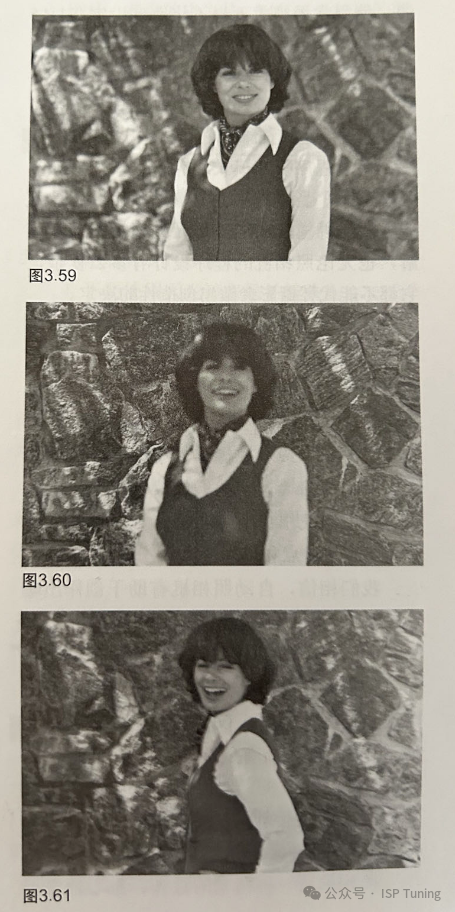
如果一幅照片看上去是模糊的,那就需要确定其原因是照相机震动还是聚焦失误,可以观察如上的三幅图,图3.59呈现的是一幅人物主体清晰的照片,另外两幅是模糊的。
图3.60的问题是聚焦不当,因为主体人物虽然模糊,但人物后面的背景墙却是清晰的,摄影者是对墙聚焦,而没有对模特聚焦。
图3.61中,模特是模糊的,后面的背景墙也是模糊的,整幅画面没有一处是清晰的,原因只能是由照相机的震动导致的。
所以如果照片中某些景物是清晰的,那么就是聚焦的问题;如果哪里都不清晰,那么就是照相机震动的问题。
避免相机震动的方法可以概括如下:
1、只要可能就使用三脚架。
2、手持标准镜头拍摄(视角和人眼类似,在40-53度之间,焦距在50mm的镜头)时,使用1/125秒或更高的快门速度。
3、不管快门速度如何,都要竭尽所能稳固地把握住相机。
文章首发于我的微信公众号:【ISP Tuning】


![[FreeRTOS 基础知识] 保存现场与恢复现场](https://img-blog.csdnimg.cn/direct/a8c8af3675fd4613b1e2739452a70011.png)