文章目录
- Abstract
- Introduction
- Related Work
- Methods
-
- Class-aware Label Correction
-
- Update
- Filtering
- Trend-guided Learning Strategy
-
- Trend-guided Label Reweighting
- Recurrent Box Regeneration
- Experiment
paper
Abstract
精确检测遥感图像中的小目标非常困难,因为这类目标视觉信息有限且在场景中频繁出现。此外,手动标注这些小目标不仅费时费力,还容易出错,即产生标签噪声。当使用带有噪声标签的训练集训练检测器时,网络往往倾向于过度拟合错误标签,导致性能不佳。
为了解决这一问题,作者提出了DeNoising Tiny Object Detector(DN-TOD)。该方法包含两个关键组成部分:Class-aware Label Correction(CLC)和Trend-guided Learning Strategy(TLS)。其中,CLC用于纠正类别偏移的问题,通过识别并过滤掉错误标记的正样本;而TLS则处理边界框噪声,通过样本权重调整和边界框再生策略来减少由噪声边界框引起的监督误差。这两个机制协同作用,使得DN-TOD能够在面对不同类型的标签噪声时保持稳健性。
Introduction
作者发现两种类型的噪声会显著降低检测性能,即类移位和不准确的边界框。
微小目标检测数据集中的类不平衡问题可以使频繁类比罕见类产生显著更高的置信度。此外,不准确的边界框会影响分类和回归,微小目标回归很容易受到边界框偏移的影响
物体主体的边界框偏移会恶化微小物体缺乏高质量阳性样本的情况,同时降低分类精度。
DN-TOD分别通过类感知标签校正(CLC)方案和趋势引导学习策略(TLS)解决了类转移和不准确的边界框问题。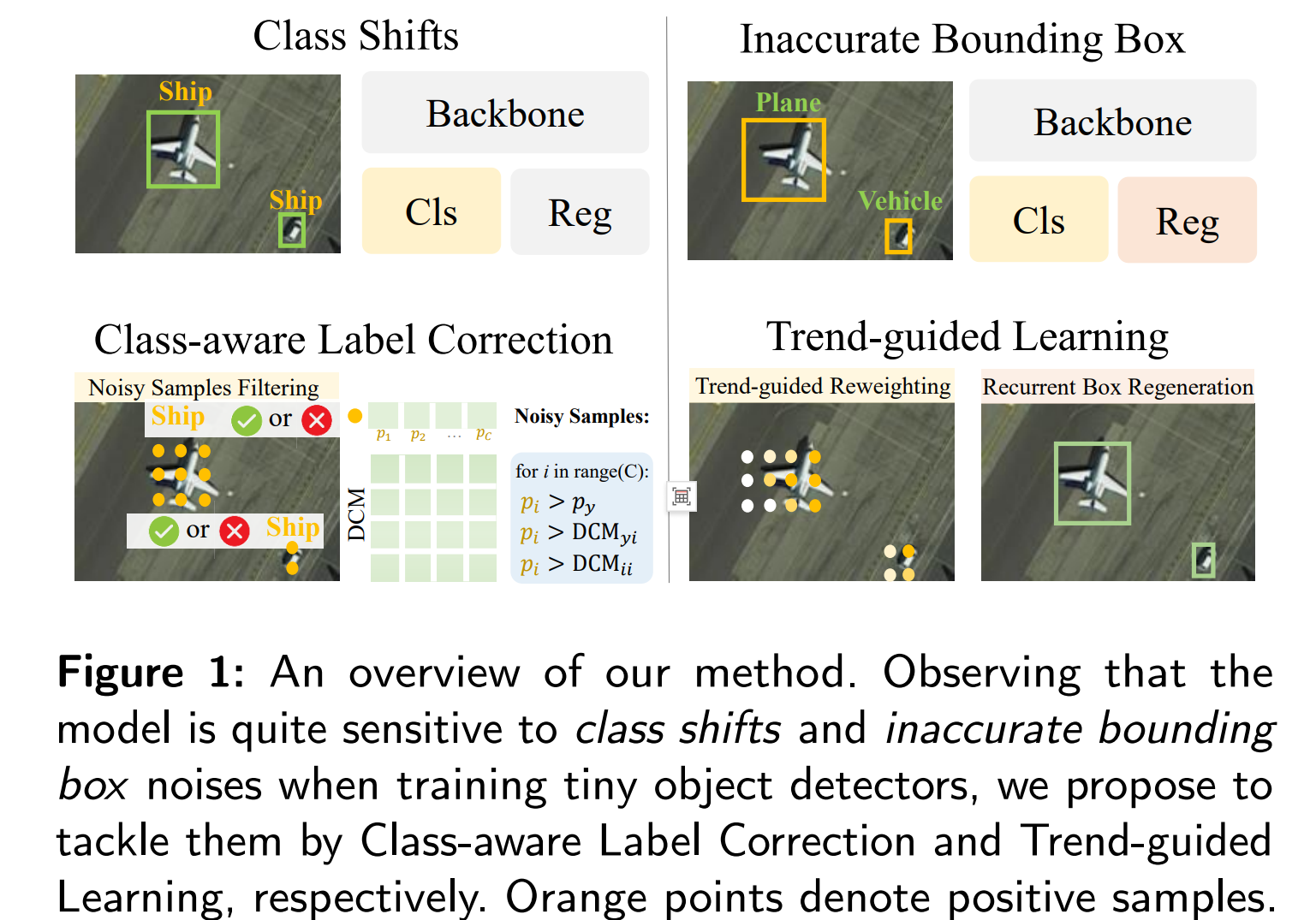
具体来说,CLC模块可以分为类混淆状态更新和噪声样本滤波的过程。在更新阶段,作者设计了一个类感知的动态置信度矩阵(DCM),DCM通过一段时间内不同类别的网络预测来更新。该矩阵对不同类别之间的转移概率进行动态编码,为类别不平衡条件下的过滤阶段提供类别判别准则。在滤波阶段,遍历正样本的每一类预测,并通过基于DCM和预测置信度的三个启发式规则识别噪声样本。
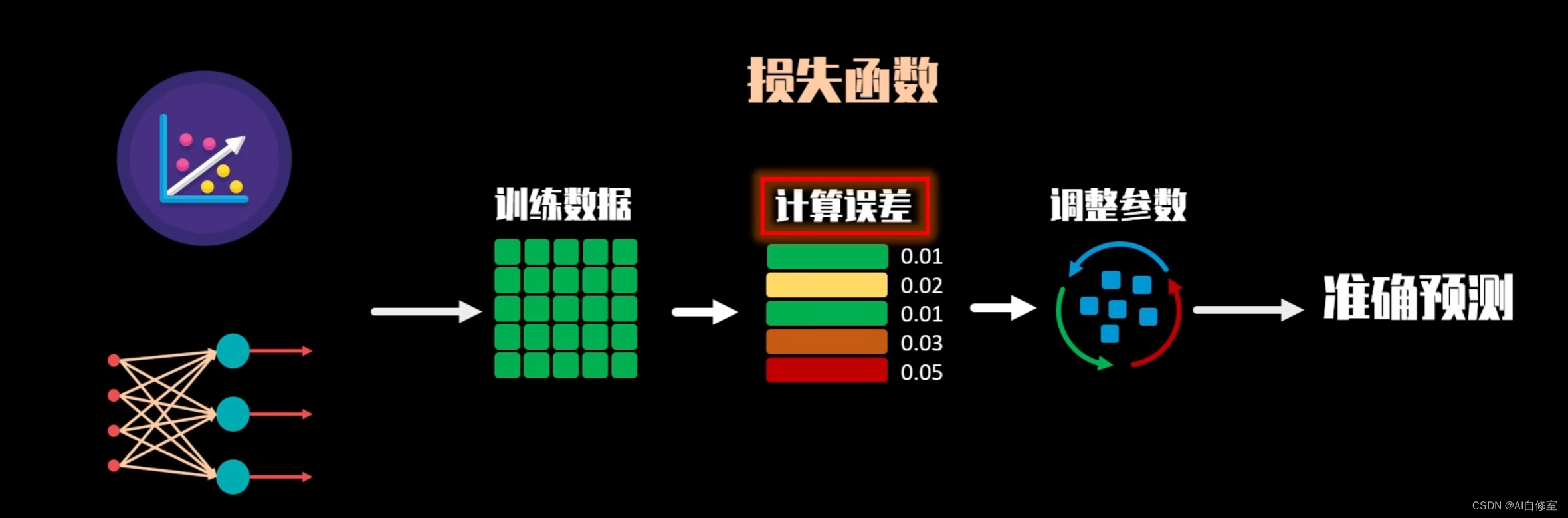
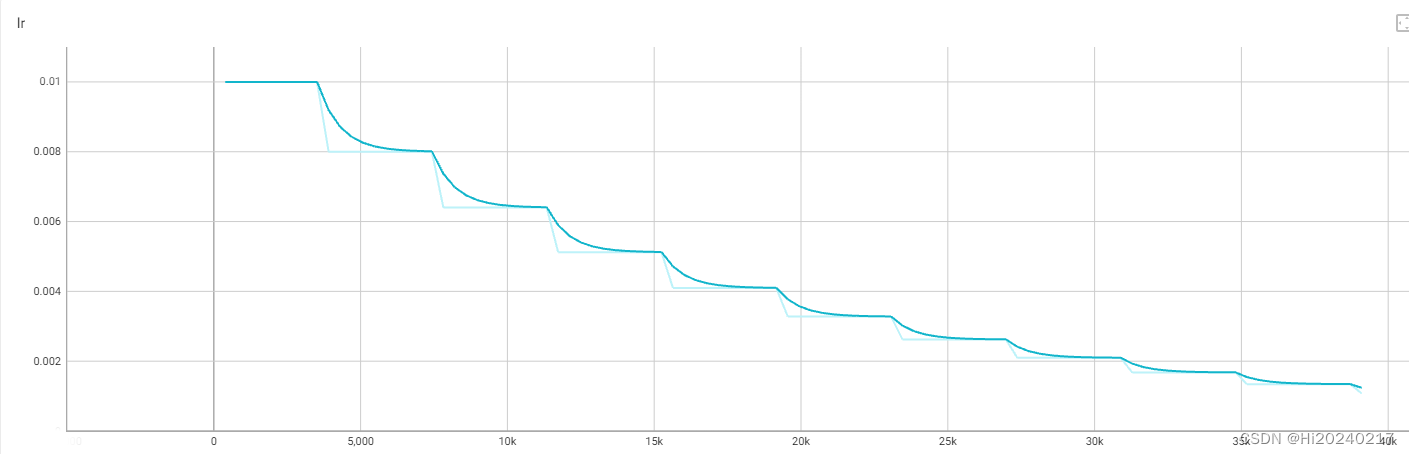
另一方面,针对不准确边界框带来的双重影响,作者提出同时增强检测器的分类和回归鲁棒性。该设计是基于对干净样本和有噪声样本之间学习趋势差异的关键观察。如图所示,在合成的噪声数据集中计算干净样本和噪声样本的平均置信度得分,发现干净样本呈逐渐增加的趋势,而噪声样本的置信度在训练过程中会在较低的分数范围内波动