文章目录
- 0. 概述
- 1. 问题
- 2. 最短路径
- 2.1 最短路径树
- 2.1.1 单调性
- 2.1.2 歧义性
- 2.1. 3 无环性
- 2.2 Dijkstra 算法
- 2.2.1 贪心迭代
- 2.2.2 实现
- 2.2.3 实例
- 2.2.4 复杂度
0. 概述
学习下最短路径和Dijistra算法
1. 问题
给定带权网络G = (V, E),以及源点(source)s ∈ V,对于所有的其它顶点v,s到v的最短通路有多长?该通路由哪些边构成?
2. 最短路径
2.1 最短路径树
2.1.1 单调性

设顶点s到v的最短路径为
ρ
\rho
ρ。于是对于该路径上的任一顶点u,若其在
ρ
\rho
ρ上对应的前缀为
σ
\sigma
σ,则
σ
\sigma
σ也必
是s到u的最短路径(之一)。
2.1.2 歧义性
较之最小支撑树,最短路径的歧义性更难处理。首先,即便各边权重互异,从s到v的最短路径也未必唯一。另外,当存在非正权重的边,并导致某个环路的总权值非正时,最短路径甚至无从定义。因此以下不妨假定,带权网络G内各边权重均大于零。
2.1. 3 无环性
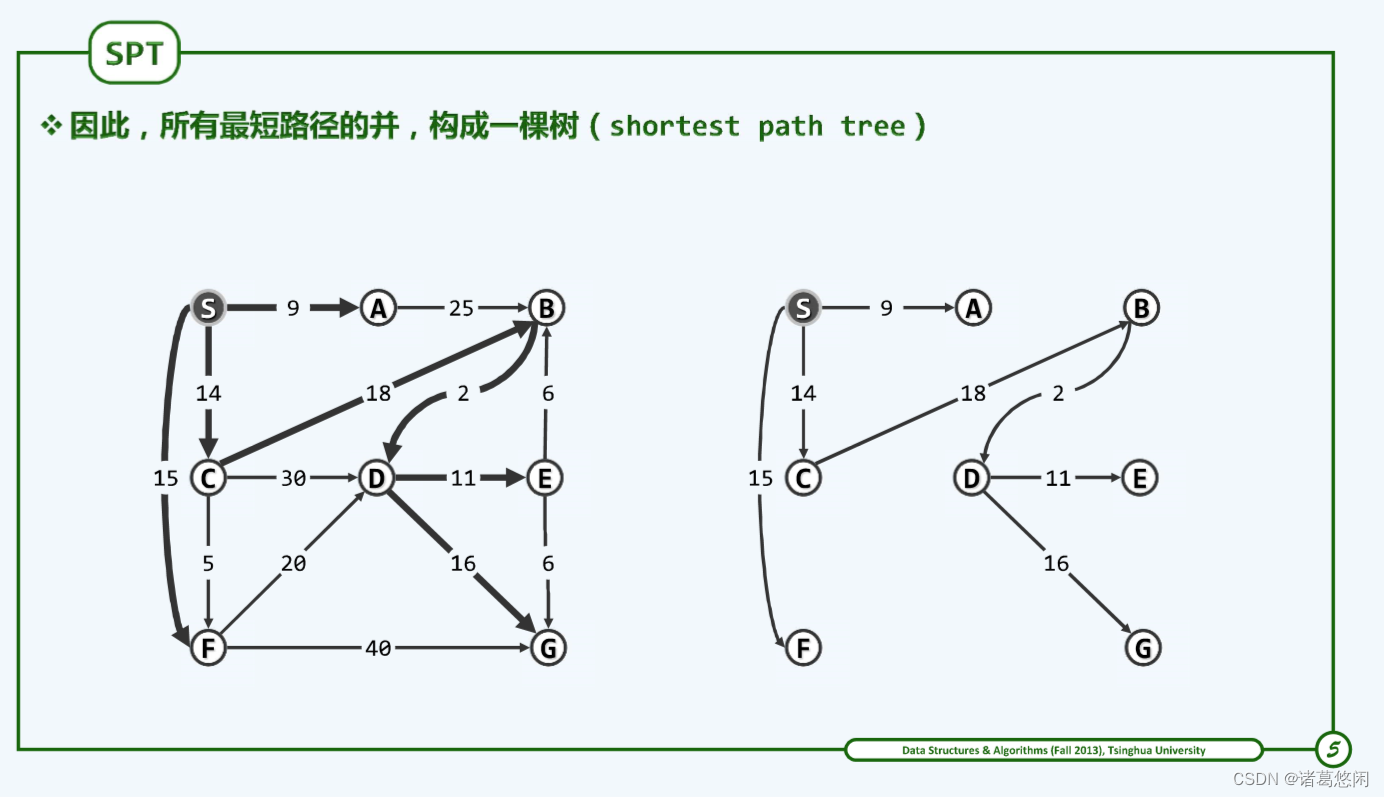 考查从源点到其余顶点的最短路径(若有多条,任选其一)。于是由以上单调性,这些路径的并集必然不含任何(有向)回路。这就意味着,如图所示,构成所谓的最短路径树(shortest-path tree)。
考查从源点到其余顶点的最短路径(若有多条,任选其一)。于是由以上单调性,这些路径的并集必然不含任何(有向)回路。这就意味着,如图所示,构成所谓的最短路径树(shortest-path tree)。
2.2 Dijkstra 算法
2.2.1 贪心迭代


上述思路可知,只要能够确定
u
k
+
1
u_{k+1}
uk+1,便可反过来将
T
k
T_k
Tk扩展为
T
k
+
1
T_{k+1}
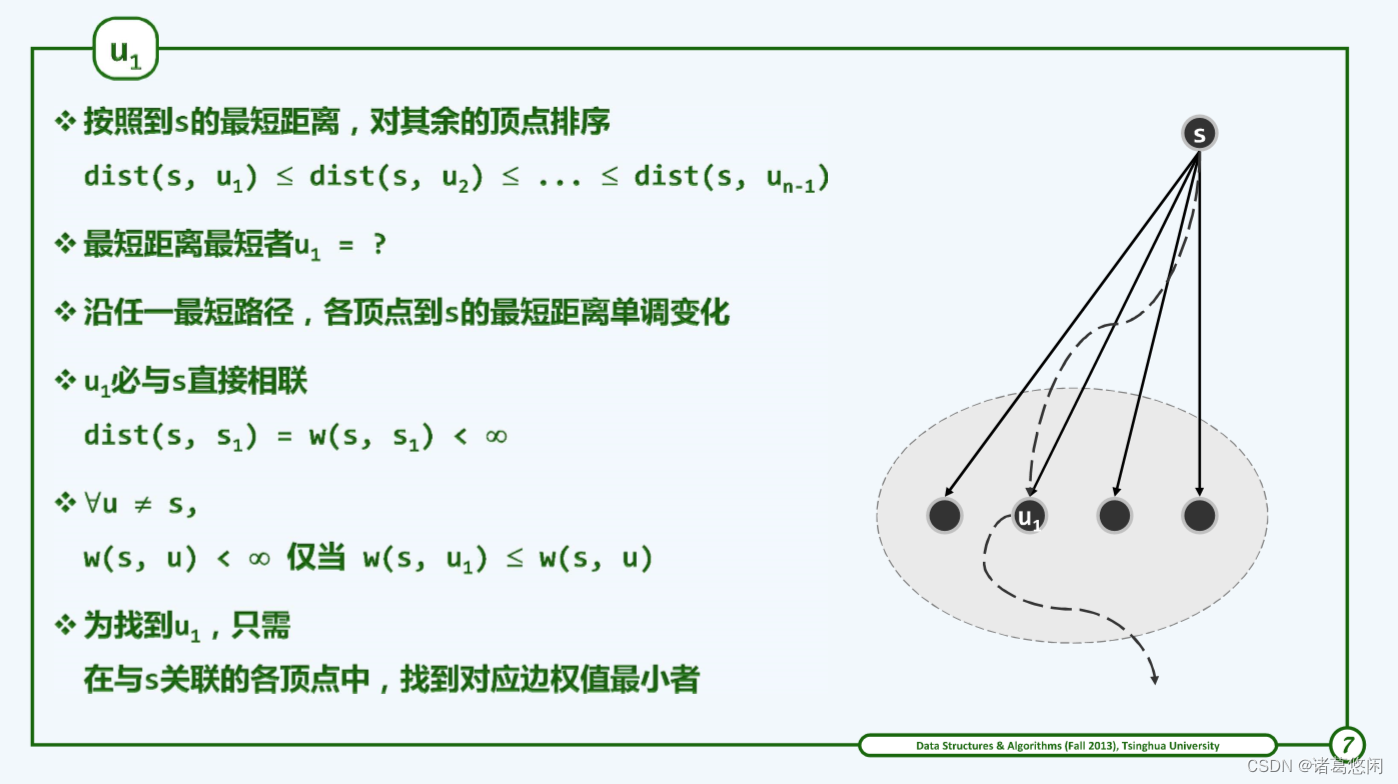
Tk+1。如此,便可按照到s距离的非降次序,逐一确定各个顶点{
u
1
u_1
u1,
u
2
u_2
u2, …,
u
n
u_n
un},同时得到各棵最短路径子树,并得到最终的最短路径树T =
T
n
T_n
Tn。现在,问题的关键就在于:
~~~~~~~~~~~~~~~~~~
如何才能高效地找到
u
k
+
1
u_{k+1}
uk+1?
实际上,由最短路径子树序列的上述性质,每一个顶点
u
k
+
1
u_{k+1}
uk+1都是在
T
k
T_k
Tk之外,距离s最近者。若将此距离作为各顶点的优先级数,则与最小支撑树的Prim算法类似,每次将
u
k
+
1
u_{k+1}
uk+1加入
T
k
T_k
Tk并将其拓展至
T
k
+
1
T_{k+1}
Tk+1后,需要且只需要更新那些仍在
T
k
+
1
T_{k+1}
Tk+1之外,且与
T
k
+
1
T_{k+1}
Tk+1关联的顶点的优先级数。
可见,该算法与Prim算法仅有一处差异:考虑的是 u k + 1 u_{k+1} uk+1到s的距离,而不再是其到 T k T_k Tk的距离。
2.2.2 实现
与Prim算法一样,Dijkstra算法也可纳入此前的优先级搜索算法框架。
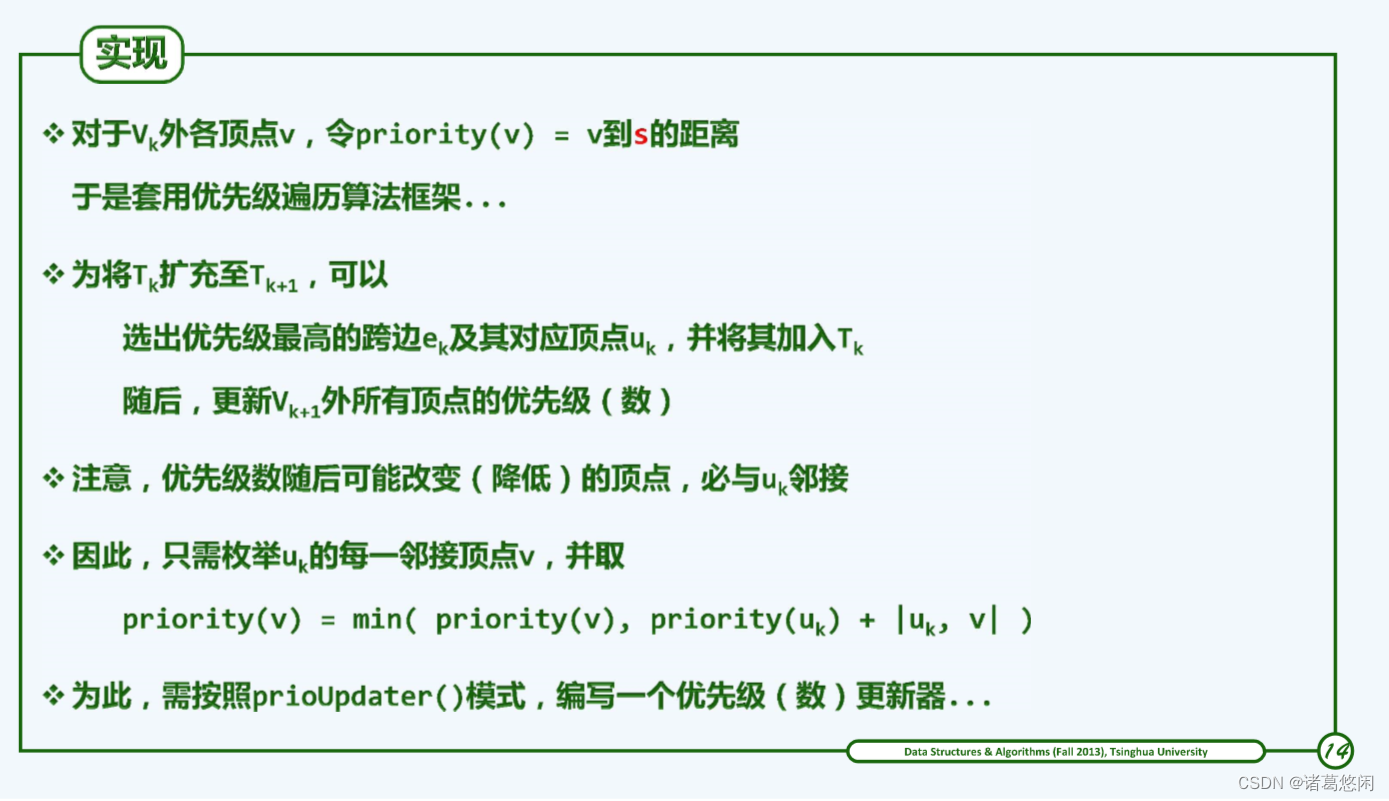
为此,每次由 T k T_k Tk扩展至 T k + 1 T_{k+1} Tk+1时,可将 V k V_k Vk之外各顶点u到 V k V_k Vk的距离看作u的优先级数(若u与 V k V_k Vk内顶点均无联边,则优先级数设为+∞)。如此,每一最短跨越边 e k e_k ek所对应的顶点 u k u_k uk,都会因拥有最小的优先级数(或等价地,最高的优先级)而被选中。

唯一需要专门处理的是,在
u
k
u_k
uk和
e
k
e_k
ek加入
T
k
T_k
Tk之后,应如何快速地更新
V
k
+
1
V_{k+1}
Vk+1以外顶点的优先级数。实际上,只有与
u
k
u_k
uk邻接的那些顶点,才有可能在此后降低优先级数。因此与Prim算法一样,也可遍历
u
k
u_k
uk的每一个邻居v,只要边
u
k
v
u_kv
ukv的权重加上
u
k
u_k
uk的优先级数,小于v当前的优先级数,即可将后者更新为前者。
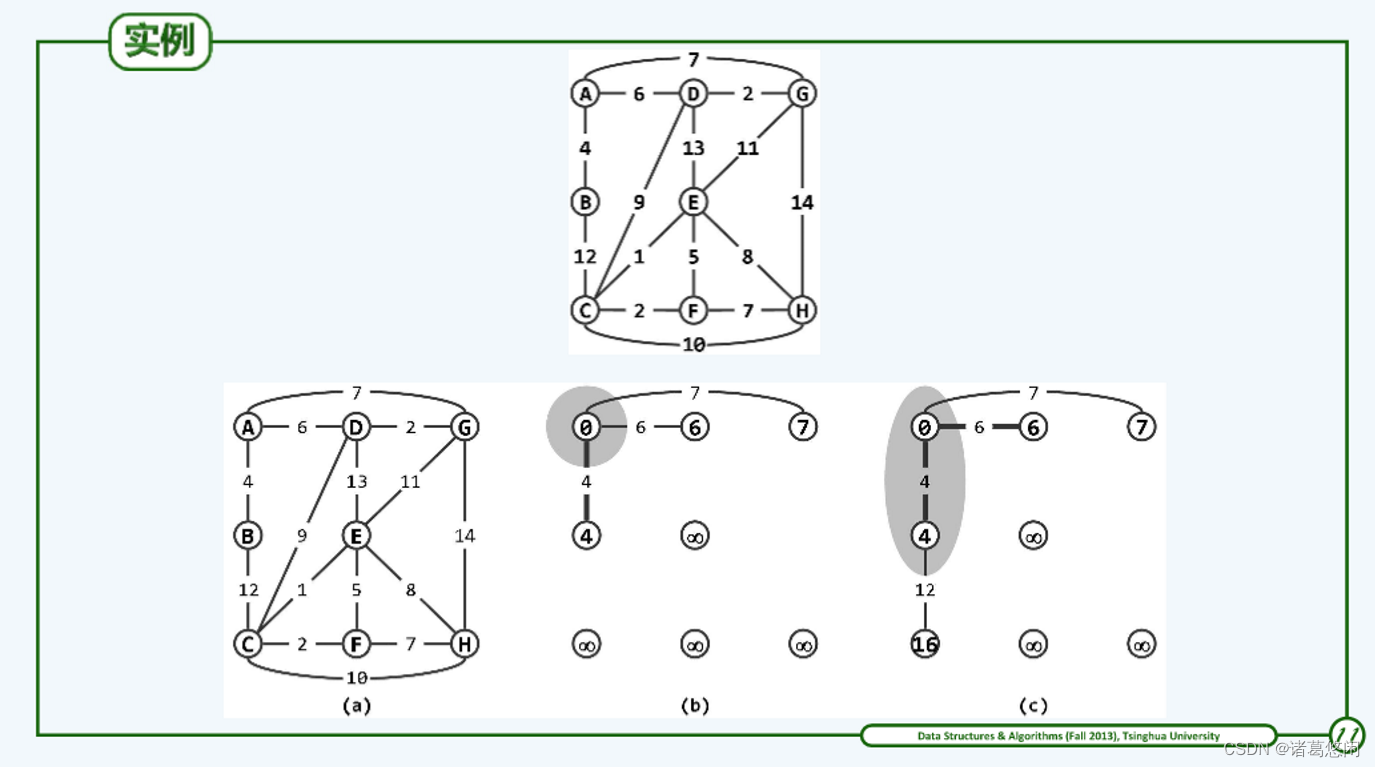
2.2.3 实例


2.2.4 复杂度
不难看出,以上顶点优先级更新器只需常数运行时间。同样根据对PFS搜索性能的分析结论,Dijkstra算法这一实现版本的时间复杂度为O( n 2 n^2 n2)。
作为PFS搜索的特例,Dijkstra算法的效率也可借助优先级队列进一步提高。