0 前言
从planning的角度看control,首先需要了解的就是相关的数据接口,规划出的轨迹(路径+速度)发给Control模块去执行
modules/planning/planning_component/planning_component.cc
planning模块发布轨迹信息
planning_writer_ = node_->CreateWriter<ADCTrajectory>(
config_.topic_config().planning_trajectory_topic());
modules/control/control_component/control_component.cc
Control模块接受轨迹信息
trajectory_reader_ =
node_->CreateReader<ADCTrajectory>(planning_reader_config, nullptr);
ACHECK(trajectory_reader_ != nullptr);
ADCTrajectory在modules/common_msgs/planning_msgs/planning.proto定义
message ADCTrajectory {
optional apollo.common.Header header = 1;
optional double total_path_length = 2; // in meters
optional double total_path_time = 3; // in seconds
optional EStop estop = 6;
optional apollo.planning_internal.Debug debug = 8;
// is_replan == true mean replan triggered 重规划
optional bool is_replan = 9 [default = false];
// Specify trajectory gear 档位
optional apollo.canbus.Chassis.GearPosition gear = 10;
// path data + speed data 路径数据 + 速度数据
repeated apollo.common.TrajectoryPoint trajectory_point = 12;
// path point without speed info 路径点
repeated apollo.common.PathPoint path_point = 13;
optional apollo.planning.DecisionResult decision = 14;
optional LatencyStats latency_stats = 15;
// the routing used for current planning result
optional apollo.common.Header routing_header = 16;
enum RightOfWayStatus {
UNPROTECTED = 0;
PROTECTED = 1;
}
optional RightOfWayStatus right_of_way_status = 17;
// lane id along current reference line
repeated apollo.hdmap.Id lane_id = 18;
// set the engage advice for based on current planning result.
optional apollo.common.EngageAdvice engage_advice = 19;
// the region where planning cares most
message CriticalRegion {
repeated apollo.common.Polygon region = 1;
}
// critical region will be empty when planning is NOT sure which region is
// critical
// critical regions may or may not overlap
optional CriticalRegion critical_region = 20;
// 轨迹类型(未知、正常、)
enum TrajectoryType {
UNKNOWN = 0; // 未知的轨迹类型,通常用于表示无法确定或识别的情况
NORMAL = 1; // 正常的轨迹类型,可能是由标准路径规划算法生成的轨迹
PATH_FALLBACK = 2; // 路径回退类型,当标准路径规划失败时,可能会使用备用路径规划算法生成轨迹
SPEED_FALLBACK = 3;// 速度回退类型,当无法满足速度约束条件时,可能会使用备用速度规划算法生成轨迹
PATH_REUSED = 4; // 重用路径类型,可能是之前生成的路径的重用或修改版本
OPEN_SPACE = 5; // 开放空间类型,通常用于表示在开放环境中的轨迹规划,比如停车或避障等情况
}
optional TrajectoryType trajectory_type = 21 [default = UNKNOWN];
optional string replan_reason = 22;
// lane id along target reference line
repeated apollo.hdmap.Id target_lane_id = 23;
// complete dead end flag
optional bool car_in_dead_end = 24;
// output related to RSS
optional RSSInfo rss_info = 100;
}
1 纵览控制模块
Control模块由control组件包和controller控制器组成,control组件包包含control的整体架构和流程。control根据上游模块输入planning模块的期望轨迹信息,定位模块的当前定位信息,车辆底盘及车身状态信息,通过不同的控制算法计算控制车辆的指令(包含转向、油门、刹车等)输出给canbus模块

1.1 control_component
control_component是继承于apollo::cyber::TimerComponent的子类,是一个定时触发的组件,通过dag配置可以修改定时器周期。Init和Proc是入口函数,在初始化函数中,主要实现了ControlTaskAgent的初始化,以及control上游的相关消息的订阅。在Proc执行函数中,分别执行了几步操作:获取订阅消息的当前最新数据–>检查订阅消息输入数据(代码里主要检查了对轨迹线数据是否为空的检查,其它消息数据的检查也可以自行添加)是否完整–>检查订阅消息输入数据时间戳是否在容差范围内(上游消息的数据周期是否超时,如果超时control会有紧急处理)–>更新车身姿态信息–>进行control控制计算(这部分调用ControlTaskAgent的ComputeControlCommand方法,ControlTaskAgent通过配置文件,管理控制器ControlTask的加载和执行顺序,进而完成控制指令的计算)–>输出底盘控制指令
1.2 control_task_base
control_component/controller_task_base/主要包含ControlTaskAgent和ControlTask定义。ControlTaskAgent用来管理ControlTask插件的加载和执行顺序,ControlTask是controller控制器插件的父类,Control/controller控制器插件都继承于ControlTask,目前Apollo已经支持的控制器插件有横向控制器(LatController),纵向控制器(LonController),MPC控制器(MPCController),以及DemoControlTask任务器(DemoControlTask)
1.3 controller
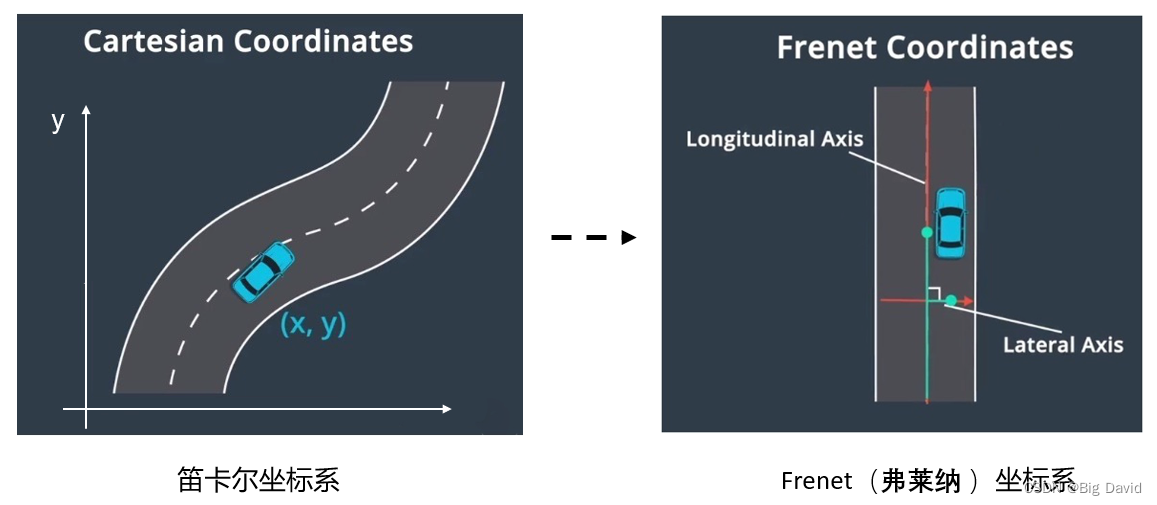
Apollo对车辆的控制是将车辆在车体坐标系转换到Frenet坐标系下进行位置跟踪,将车辆跟踪轨迹的运动分解为横向运动和纵向运动,通过对车体的动力学建模,选取合适的状态变量对车辆的跟踪情况进行观测,再通过横向和纵向的控制算法,计算合理的控制指令,达到对轨迹线的跟踪目标
1.4 文件组织结构及说明
control/
├── control_component/ // control基础组件
├── common // 模块全局gflag定义
├── conf // 模块配置文件,参数文件目录,包含gflags变量的配置,插件启用的配置文件,车辆标定表等通用的配置文件
├── controller_task_base/ // control控制器父类组件
│ ├── common/ // 数学公式,算法公式,滤波函数,轨迹分析
│ ├── integration_tests/ // 单元测试文件夹
│ ├── control_task_agent.cc // 控制器加载管理器实现文件
│ ├── control_task_agent.h // 控制器加载管理器实现文件
│ └── control_task.h // 控制器父类实现文件
├── dag/ // 模块启动文件(mainboard)
├── docs/ // 相关模块说明文档
├── launch/ // 模块启动文件(cyber_launch)
├── proto/ // 组件定义的配置文件
├── submodules/ // control子模块
├── testdata/ // 单元测试数据
├── tools/ // 调试工具
├── BUILD // 构建规则文件
├── control_component.cc // 组件实现的代码文件
├── control_component.h // 组件实现的代码文件
├── control_component_test.cc // 组件单元测试文件
├── control.json // 打包描述文件
├── cyberfile.xml // 包管理配置文件
└── README_cn.md // 说明文档
└── controllers/ // 控制器算法或逻辑任务组件
├── demo_control_task // demo控制器插件包
│ ├── proto/ // 控制器的配置定义文件夹
│ ├── conf/ // 控制器配置文件夹
│ ├── BUILD // 构建规则文件
│ ├── cyberfile.xml // 包管理配置文件
│ ├── demo_control_task.cc // demo控制器实现文件
│ ├── demo_control_task.h // demo控制器实现文件
│ └── plugins.xml // 插件规则文件
├── lat_based_lqr_controller // LQR横向控制器插件包
│ ├── proto/ // 控制器的配置定义文件夹
│ ├── conf/ // 控制器配置文件夹
│ ├── BUILD // 构建规则文件
│ ├── cyberfile.xml // 包管理配置文件
│ ├── lat_controller.cc // LQR横向控制器实现文件
│ ├── lat_controller.h // LQR横向控制器实现文件
│ ├── lat_controller_test.cc // LQR横向控制器单元测试文件
│ ├── lateral_controller_test // 控制器测试数据
│ └── plugins.xml // 插件规则文件
├── lon_based_pid_controller // PID纵向控制器插件包
│ ├── proto/ // 控制器的配置定义文件夹
│ ├── conf/ // 控制器配置文件夹
│ ├── BUILD // 构建规则文件
│ ├── cyberfile.xml // 包管理配置文件
│ ├── lon_controller.cc // PID纵向控制器实现文件
│ ├── lon_controller.h // PID纵向控制器实现文件
│ ├── lon_controller_test.cc // PID纵向控制器单元测试文件
│ ├── longitudinal_controller_test// 控制器测试数据
│ └── plugins.xml // 插件规则文件
└── mpc_controller // MPC横纵向控制器插件包
├── proto/ // 控制器的配置定义文件夹
├── conf/ // 控制器配置文件夹
├── BUILD // 构建规则文件
├── cyberfile.xml // 包管理配置文件
├── mpc_controller.cc // MPC控制器实现文件
├── mpc_controller.h // MPC控制器实现文件
├── mpc_controller_test.cc // MPC控制器单元测试文件
├── mpc_controller_test_data // 控制器测试数据
└── plugins.xml // 插件规则文件
1.5 模块输入输出与配置
输入:
| Channel名称 | 类型 | 描述 |
|---|---|---|
/apollo/planning | apollo::planning::ADCTrajectory | 车辆规划轨迹线信息 |
/apollo/localization/pose | apollo::localization::LocalizationEstimate | 车辆定位信息 |
/apollo/canbus/chassis | apollo::canbus::Chassis | 车辆底盘信息 |
| - | apollo::common::VehicleState | 车身姿态信息 |
/apollo/control/pad | apollo::control::ControlCommand::PadMessage | 自动驾驶使能(请求进入自动驾驶)指令 |
输出:
| Channel名称 | 类型 | 描述 |
|---|---|---|
/apollo/control | apollo::control::ControlCommand | 车辆的控制指令,如方向盘、油门、刹车等信息 |
配置文件:
| 文件路径 | 类型/结构 | 说明 |
|---|---|---|
modules/control/control_component/conf/pipeline.pb.txt | apollo::control::ControlPipeline | ControlComponent的配置文件 |
modules/control/control_component/conf/control.conf | command line flags | 命令行参数配置 |
modules/control/control_component/conf/calibration_table.pb.txt | apollo::control::calibration_table | 车辆纵向标定表配置 |
Flags:
| flagfile | 类型 | 描述 |
|---|---|---|
modules/control/control_component/common/control_gflags.cc | flags | Control组件flags变量定义文件 |
modules/control/control_component/common/control_gflags.h | declare | Control组件flags声明文件 |
2 控制器组件代码解析
control_component.h
#pragma once
#include <memory>
#include <string>
#include "modules/common_msgs/chassis_msgs/chassis.pb.h"
#include "modules/common_msgs/control_msgs/control_cmd.pb.h"
#include "modules/common_msgs/control_msgs/pad_msg.pb.h"
#include "modules/common_msgs/external_command_msgs/command_status.pb.h"
#include "modules/common_msgs/localization_msgs/localization.pb.h"
#include "modules/common_msgs/planning_msgs/planning.pb.h"
#include "modules/control/control_component/proto/preprocessor.pb.h"
#include "cyber/class_loader/class_loader.h"
#include "cyber/component/timer_component.h"
#include "cyber/time/time.h"
#include "modules/common/monitor_log/monitor_log_buffer.h"
#include "modules/common/util/util.h"
#include "modules/control/control_component/controller_task_base/common/dependency_injector.h"
#include "modules/control/control_component/controller_task_base/control_task_agent.h"
#include "modules/control/control_component/submodules/preprocessor_submodule.h"
/**
* @namespace apollo::control
* @brief apollo::control
*/
namespace apollo {
namespace control {
/**
* @class Control
*
* @brief control module main class, it processes localization, chassis, and
* pad data to compute throttle, brake and steer values.
*/
// 控制模块主类,处理定位、底盘、pad数据为了计算油门、刹车和转向,继承apollo::cyber::TimerComponent,定时触发
class ControlComponent final : public apollo::cyber::TimerComponent {
friend class ControlTestBase;
public:
ControlComponent();
bool Init() override;
bool Proc() override;
private:
// Upon receiving pad message
// 接收pad消息
void OnPad(const std::shared_ptr<PadMessage> &pad);
// 接收底盘消息
void OnChassis(const std::shared_ptr<apollo::canbus::Chassis> &chassis);
// 接受轨迹消息
void OnPlanning(
const std::shared_ptr<apollo::planning::ADCTrajectory> &trajectory);
// 规划命令状态信息
void OnPlanningCommandStatus(
const std::shared_ptr<external_command::CommandStatus>
&planning_command_status);
// 接收定位消息
void OnLocalization(
const std::shared_ptr<apollo::localization::LocalizationEstimate>
&localization);
// Upon receiving monitor message
// 接收检测信息
void OnMonitor(
const apollo::common::monitor::MonitorMessage &monitor_message);
common::Status ProduceControlCommand(ControlCommand *control_command);
common::Status CheckInput(LocalView *local_view);
common::Status CheckTimestamp(const LocalView &local_view);
common::Status CheckPad();
void ResetAndProduceZeroControlCommand(ControlCommand *control_command);
void GetVehiclePitchAngle(ControlCommand *control_command);
private:
apollo::cyber::Time init_time_;
localization::LocalizationEstimate latest_localization_;
canbus::Chassis latest_chassis_;
planning::ADCTrajectory latest_trajectory_;
external_command::CommandStatus planning_command_status_;
PadMessage pad_msg_;
common::Header latest_replan_trajectory_header_;
ControlTaskAgent control_task_agent_;
bool estop_ = false;
std::string estop_reason_;
bool pad_received_ = false;
unsigned int status_lost_ = 0;
unsigned int status_sanity_check_failed_ = 0;
unsigned int total_status_lost_ = 0;
unsigned int total_status_sanity_check_failed_ = 0;
ControlPipeline control_pipeline_;
std::mutex mutex_;
// 订阅者 底盘、pad、定位、轨迹、命令状态
std::shared_ptr<cyber::Reader<apollo::canbus::Chassis>> chassis_reader_;
std::shared_ptr<cyber::Reader<PadMessage>> pad_msg_reader_;
std::shared_ptr<cyber::Reader<apollo::localization::LocalizationEstimate>>
localization_reader_;
std::shared_ptr<cyber::Reader<apollo::planning::ADCTrajectory>>
trajectory_reader_;
std::shared_ptr<cyber::Reader<apollo::external_command::CommandStatus>>
planning_command_status_reader_;
// 发布者 控制命令、使用控制子模块LocalView
std::shared_ptr<cyber::Writer<ControlCommand>> control_cmd_writer_;
// when using control submodules
std::shared_ptr<cyber::Writer<LocalView>> local_view_writer_;
common::monitor::MonitorLogBuffer monitor_logger_buffer_;
LocalView local_view_;
std::shared_ptr<DependencyInjector> injector_;
double previous_steering_command_ = 0.0;
};
CYBER_REGISTER_COMPONENT(ControlComponent)
} // namespace control
} // namespace apollo
control_component.cc
#include "modules/control/control_component/control_component.h"
#include "absl/strings/str_cat.h"
#include "cyber/common/file.h"
#include "cyber/common/log.h"
#include "cyber/time/clock.h"
#include "modules/common/adapters/adapter_gflags.h"
#include "modules/common/latency_recorder/latency_recorder.h"
#include "modules/common/vehicle_state/vehicle_state_provider.h"
#include "modules/control/control_component/common/control_gflags.h"
namespace apollo {
namespace control {
using apollo::canbus::Chassis;
using apollo::common::ErrorCode;
using apollo::common::Status;
using apollo::common::VehicleStateProvider;
using apollo::cyber::Clock;
using apollo::localization::LocalizationEstimate;
using apollo::planning::ADCTrajectory;
const double kDoubleEpsilon = 1e-6;
ControlComponent::ControlComponent()
: monitor_logger_buffer_(common::monitor::MonitorMessageItem::CONTROL) {}
bool ControlComponent::Init() {
injector_ = std::make_shared<DependencyInjector>();
init_time_ = Clock::Now();
AINFO << "Control init, starting ...";
ACHECK(
cyber::common::GetProtoFromFile(FLAGS_pipeline_file, &control_pipeline_))
<< "Unable to load control pipeline file: " + FLAGS_pipeline_file;
AINFO << "ControlTask pipeline config file: " << FLAGS_pipeline_file
<< " is loaded.";
// initial controller agent when not using control submodules
ADEBUG << "FLAGS_use_control_submodules: " << FLAGS_use_control_submodules;
if (!FLAGS_is_control_ut_test_mode) {
if (!FLAGS_use_control_submodules &&
!control_task_agent_.Init(injector_, control_pipeline_).ok()) {
// set controller
ADEBUG << "original control";
monitor_logger_buffer_.ERROR(
"Control init controller failed! Stopping...");
return false;
}
}
cyber::ReaderConfig chassis_reader_config;
chassis_reader_config.channel_name = FLAGS_chassis_topic;
chassis_reader_config.pending_queue_size = FLAGS_chassis_pending_queue_size;
// 订阅底盘信息
chassis_reader_ =
node_->CreateReader<Chassis>(chassis_reader_config, nullptr);
ACHECK(chassis_reader_ != nullptr);
cyber::ReaderConfig planning_reader_config;
planning_reader_config.channel_name = FLAGS_planning_trajectory_topic;
planning_reader_config.pending_queue_size = FLAGS_planning_pending_queue_size;
// 订阅轨迹信息
trajectory_reader_ =
node_->CreateReader<ADCTrajectory>(planning_reader_config, nullptr);
ACHECK(trajectory_reader_ != nullptr);
cyber::ReaderConfig planning_command_status_reader_config;
planning_command_status_reader_config.channel_name =
FLAGS_planning_command_status;
planning_command_status_reader_config.pending_queue_size =
FLAGS_planning_status_msg_pending_queue_size;
// 订阅规划命令状态
planning_command_status_reader_ =
node_->CreateReader<external_command::CommandStatus>(
planning_command_status_reader_config, nullptr);
ACHECK(planning_command_status_reader_ != nullptr);
cyber::ReaderConfig localization_reader_config;
localization_reader_config.channel_name = FLAGS_localization_topic;
localization_reader_config.pending_queue_size =
FLAGS_localization_pending_queue_size;
// 订阅定位信息
localization_reader_ = node_->CreateReader<LocalizationEstimate>(
localization_reader_config, nullptr);
ACHECK(localization_reader_ != nullptr);
cyber::ReaderConfig pad_msg_reader_config;
pad_msg_reader_config.channel_name = FLAGS_pad_topic;
pad_msg_reader_config.pending_queue_size = FLAGS_pad_msg_pending_queue_size;
// 订阅pad消息
pad_msg_reader_ =
node_->CreateReader<PadMessage>(pad_msg_reader_config, nullptr);
ACHECK(pad_msg_reader_ != nullptr);
// 如果使用控制子模块,发布控制话题,否则,发布控制local_view
if (!FLAGS_use_control_submodules) {
control_cmd_writer_ =
node_->CreateWriter<ControlCommand>(FLAGS_control_command_topic);
ACHECK(control_cmd_writer_ != nullptr);
} else {
local_view_writer_ =
node_->CreateWriter<LocalView>(FLAGS_control_local_view_topic);
ACHECK(local_view_writer_ != nullptr);
}
// set initial vehicle state by cmd
// need to sleep, because advertised channel is not ready immediately
// simple test shows a short delay of 80 ms or so
// 休眠1000ms
AINFO << "Control resetting vehicle state, sleeping for 1000 ms ...";
std::this_thread::sleep_for(std::chrono::milliseconds(1000));
// should init_vehicle first, let car enter work status, then use status msg
// trigger control
// 首先初始化vehicle,让车到工作状态,然后使用状态消息
AINFO << "Control default driving action is "
<< DrivingAction_Name((enum DrivingAction)FLAGS_action);
pad_msg_.set_action((enum DrivingAction)FLAGS_action);
return true;
}
void ControlComponent::OnPad(const std::shared_ptr<PadMessage> &pad) {
// 创建锁,确保在访问 pad_msg_ 期间不会发生数据竞争
std::lock_guard<std::mutex> lock(mutex_);
// 将 pad 中的数据复制到 pad_msg_
pad_msg_.CopyFrom(*pad);
ADEBUG << "Received Pad Msg:" << pad_msg_.DebugString();
AERROR_IF(!pad_msg_.has_action()) << "pad message check failed!";
}
void ControlComponent::OnChassis(const std::shared_ptr<Chassis> &chassis) {
ADEBUG << "Received chassis data: run chassis callback.";
// 创建锁,确保在访问 latest_chassis_ 期间不会发生数据竞争
std::lock_guard<std::mutex> lock(mutex_);
latest_chassis_.CopyFrom(*chassis);
}
void ControlComponent::OnPlanning(
const std::shared_ptr<ADCTrajectory> &trajectory) {
ADEBUG << "Received chassis data: run trajectory callback.";
// 创建锁,确保在访问 latest_trajectory_ 期间不会发生数据竞争
std::lock_guard<std::mutex> lock(mutex_);
latest_trajectory_.CopyFrom(*trajectory);
}
void ControlComponent::OnPlanningCommandStatus(
const std::shared_ptr<external_command::CommandStatus>
&planning_command_status) {
ADEBUG << "Received plannning command status data: run planning command "
"status callback.";
// 创建锁,确保在访问 planning_command_status_ 期间不会发生数据竞争
std::lock_guard<std::mutex> lock(mutex_);
planning_command_status_.CopyFrom(*planning_command_status);
}
void ControlComponent::OnLocalization(
const std::shared_ptr<LocalizationEstimate> &localization) {
ADEBUG << "Received control data: run localization message callback.";
// 创建锁,确保在访问 latest_localization_ 期间不会发生数据竞争
std::lock_guard<std::mutex> lock(mutex_);
latest_localization_.CopyFrom(*localization);
}
void ControlComponent::OnMonitor(
const common::monitor::MonitorMessage &monitor_message) {
for (const auto &item : monitor_message.item()) {
if (item.log_level() == common::monitor::MonitorMessageItem::FATAL) {
// 检测到严重问题,需要立即停止
estop_ = true;
return;
}
}
}
Status ControlComponent::ProduceControlCommand(
ControlCommand *control_command) {
// 检查输入数据
Status status = CheckInput(&local_view_);
// check data
if (!status.ok()) {
AERROR_EVERY(100) << "Control input data failed: "
<< status.error_message();
control_command->mutable_engage_advice()->set_advice(
apollo::common::EngageAdvice::DISALLOW_ENGAGE);
control_command->mutable_engage_advice()->set_reason(
status.error_message());
estop_ = true;
estop_reason_ = status.error_message();
} else {
estop_ = false;
// 检查时间戳
Status status_ts = CheckTimestamp(local_view_);
if (!status_ts.ok()) {
AERROR << "Input messages timeout";
// Clear trajectory data to make control stop if no data received again
// next cycle.
// keep the history trajectory for control compute.
// latest_trajectory_.Clear();
estop_ = true;
status = status_ts;
if (local_view_.chassis().driving_mode() !=
apollo::canbus::Chassis::COMPLETE_AUTO_DRIVE) {
control_command->mutable_engage_advice()->set_advice(
apollo::common::EngageAdvice::DISALLOW_ENGAGE);
control_command->mutable_engage_advice()->set_reason(
status.error_message());
}
} else {
control_command->mutable_engage_advice()->set_advice(
apollo::common::EngageAdvice::READY_TO_ENGAGE);
estop_ = false;
}
}
// 检查 estop
estop_ = FLAGS_enable_persistent_estop
? estop_ || local_view_.trajectory().estop().is_estop()
: local_view_.trajectory().estop().is_estop();
// 如果规划中的 estop 标志为真,则设置 estop_ 为真
if (local_view_.trajectory().estop().is_estop()) {
estop_ = true;
estop_reason_ = "estop from planning : ";
estop_reason_ += local_view_.trajectory().estop().reason();
}
// 如果规划中的轨迹点为空,则设置 estop_ 为真
if (local_view_.trajectory().trajectory_point().empty()) {
AWARN_EVERY(100) << "planning has no trajectory point. ";
estop_ = true;
estop_reason_ = "estop for empty planning trajectory, planning headers: " +
local_view_.trajectory().header().ShortDebugString();
}
// 如果启用了 gear_drive 负速度保护功能,并且当前驾驶模式为 gear_drive,并且第一个轨迹点的速度小于 -kEpsilon,则设置 estop_ 为真
if (FLAGS_enable_gear_drive_negative_speed_protection) {
const double kEpsilon = 0.001;
auto first_trajectory_point = local_view_.trajectory().trajectory_point(0);
if (local_view_.chassis().gear_location() == Chassis::GEAR_DRIVE &&
first_trajectory_point.v() < -1 * kEpsilon) {
estop_ = true;
estop_reason_ = "estop for negative speed when gear_drive";
}
}
if (!estop_) {
// 如果当前驾驶模式为完全手动驾驶,则重置控制器
if (local_view_.chassis().driving_mode() == Chassis::COMPLETE_MANUAL) {
control_task_agent_.Reset();
AINFO_EVERY(100) << "Reset Controllers in Manual Mode";
}
// 设置控制命令的调试信息
auto debug = control_command->mutable_debug()->mutable_input_debug();
debug->mutable_localization_header()->CopyFrom(
local_view_.localization().header());
debug->mutable_canbus_header()->CopyFrom(local_view_.chassis().header());
debug->mutable_trajectory_header()->CopyFrom(
local_view_.trajectory().header());
// 如果当前规划的轨迹点不为空,则将最新的重新规划轨迹头信息记录下来
if (local_view_.trajectory().is_replan()) {
latest_replan_trajectory_header_ = local_view_.trajectory().header();
}
// 如果最新的重新规划轨迹头具有序列号,则将其记录在控制命令的调试信息中
if (latest_replan_trajectory_header_.has_sequence_num()) {
debug->mutable_latest_replan_trajectory_header()->CopyFrom(
latest_replan_trajectory_header_);
}
}
// 如果当前规划的轨迹点不为空,则调用控制任务代理计算控制命令
if (!local_view_.trajectory().trajectory_point().empty()) {
// controller agent
Status status_compute = control_task_agent_.ComputeControlCommand(
&local_view_.localization(), &local_view_.chassis(),
&local_view_.trajectory(), control_command);
ADEBUG << "status_compute is " << status_compute;
// 如果计算控制命令失败,记录错误信息并设置 estop_ 为 true
if (!status_compute.ok()) {
AERROR << "Control main function failed"
<< " with localization: "
<< local_view_.localization().ShortDebugString()
<< " with chassis: " << local_view_.chassis().ShortDebugString()
<< " with trajectory: "
<< local_view_.trajectory().ShortDebugString()
<< " with cmd: " << control_command->ShortDebugString()
<< " status:" << status_compute.error_message();
estop_ = true;
estop_reason_ = status_compute.error_message();
status = status_compute;
}
}
// if planning set estop, then no control process triggered
// 如果规划停止,控制就触发不了
if (estop_) {
AWARN_EVERY(100) << "Estop triggered! No control core method executed!";
// set Estop command
control_command->set_speed(0);
control_command->set_throttle(0);
control_command->set_brake(FLAGS_soft_estop_brake);
control_command->set_gear_location(Chassis::GEAR_DRIVE);
previous_steering_command_ =
injector_->previous_control_command_mutable()->steering_target();
control_command->set_steering_target(previous_steering_command_);
}
// check signal
if (local_view_.trajectory().decision().has_vehicle_signal()) {
control_command->mutable_signal()->CopyFrom(
local_view_.trajectory().decision().vehicle_signal());
}
return status;
}
// 核心函数Proc
bool ControlComponent::Proc() {
const auto start_time = Clock::Now();
chassis_reader_->Observe();
const auto &chassis_msg = chassis_reader_->GetLatestObserved();
// 接收不到底盘信息
if (chassis_msg == nullptr) {
AERROR << "Chassis msg is not ready!";
injector_->set_control_process(false);
return false;
}
OnChassis(chassis_msg);
trajectory_reader_->Observe();
const auto &trajectory_msg = trajectory_reader_->GetLatestObserved();
// 接收不到轨迹信息
if (trajectory_msg == nullptr) {
AERROR << "planning msg is not ready!";
} else {
// Check if new planning data received.
if (latest_trajectory_.header().sequence_num() !=
trajectory_msg->header().sequence_num()) {
OnPlanning(trajectory_msg);
}
}
planning_command_status_reader_->Observe();
const auto &planning_status_msg =
planning_command_status_reader_->GetLatestObserved();
if (planning_status_msg != nullptr) {
OnPlanningCommandStatus(planning_status_msg);
ADEBUG << "Planning command status msg is \n"
<< planning_command_status_.ShortDebugString();
}
injector_->set_planning_command_status(planning_command_status_);
localization_reader_->Observe();
const auto &localization_msg = localization_reader_->GetLatestObserved();
// 接收不到定位消息
if (localization_msg == nullptr) {
AERROR << "localization msg is not ready!";
injector_->set_control_process(false);
return false;
}
OnLocalization(localization_msg);
pad_msg_reader_->Observe();
const auto &pad_msg = pad_msg_reader_->GetLatestObserved();
if (pad_msg != nullptr) {
OnPad(pad_msg);
}
{
// TODO(SHU): to avoid redundent copy
std::lock_guard<std::mutex> lock(mutex_);
local_view_.mutable_chassis()->CopyFrom(latest_chassis_);
local_view_.mutable_trajectory()->CopyFrom(latest_trajectory_);
local_view_.mutable_localization()->CopyFrom(latest_localization_);
if (pad_msg != nullptr) {
local_view_.mutable_pad_msg()->CopyFrom(pad_msg_);
}
}
// use control submodules
if (FLAGS_use_control_submodules) {
local_view_.mutable_header()->set_lidar_timestamp(
local_view_.trajectory().header().lidar_timestamp());
local_view_.mutable_header()->set_camera_timestamp(
local_view_.trajectory().header().camera_timestamp());
local_view_.mutable_header()->set_radar_timestamp(
local_view_.trajectory().header().radar_timestamp());
common::util::FillHeader(FLAGS_control_local_view_topic, &local_view_);
const auto end_time = Clock::Now();
// measure latency
static apollo::common::LatencyRecorder latency_recorder(
FLAGS_control_local_view_topic);
latency_recorder.AppendLatencyRecord(
local_view_.trajectory().header().lidar_timestamp(), start_time,
end_time);
local_view_writer_->Write(local_view_);
return true;
}
if (pad_msg != nullptr) {
ADEBUG << "pad_msg: " << pad_msg_.ShortDebugString();
if (pad_msg_.action() == DrivingAction::RESET) {
AINFO << "Control received RESET action!";
estop_ = false;
estop_reason_.clear();
}
pad_received_ = true;
}
if (FLAGS_is_control_test_mode && FLAGS_control_test_duration > 0 &&
(start_time - init_time_).ToSecond() > FLAGS_control_test_duration) {
AERROR << "Control finished testing. exit";
injector_->set_control_process(false);
return false;
}
injector_->set_control_process(true);
ControlCommand control_command;
Status status;
// 自动驾驶模式
if (local_view_.chassis().driving_mode() ==
apollo::canbus::Chassis::COMPLETE_AUTO_DRIVE) {
status = ProduceControlCommand(&control_command);
ADEBUG << "Produce control command normal.";
} else {
ADEBUG << "Into reset control command.";
ResetAndProduceZeroControlCommand(&control_command);
}
AERROR_IF(!status.ok()) << "Failed to produce control command:"
<< status.error_message();
if (pad_received_) {
control_command.mutable_pad_msg()->CopyFrom(pad_msg_);
pad_received_ = false;
}
// forward estop reason among following control frames.
if (estop_) {
control_command.mutable_header()->mutable_status()->set_msg(estop_reason_);
}
// set header
control_command.mutable_header()->set_lidar_timestamp(
local_view_.trajectory().header().lidar_timestamp());
control_command.mutable_header()->set_camera_timestamp(
local_view_.trajectory().header().camera_timestamp());
control_command.mutable_header()->set_radar_timestamp(
local_view_.trajectory().header().radar_timestamp());
common::util::FillHeader(node_->Name(), &control_command);
ADEBUG << control_command.ShortDebugString();
if (FLAGS_is_control_test_mode) {
ADEBUG << "Skip publish control command in test mode";
return true;
}
if (fabs(control_command.debug().simple_lon_debug().vehicle_pitch()) <
kDoubleEpsilon) {
injector_->vehicle_state()->Update(local_view_.localization(),
local_view_.chassis());
GetVehiclePitchAngle(&control_command);
}
const auto end_time = Clock::Now();
const double time_diff_ms = (end_time - start_time).ToSecond() * 1e3;
ADEBUG << "total control time spend: " << time_diff_ms << " ms.";
control_command.mutable_latency_stats()->set_total_time_ms(time_diff_ms);
control_command.mutable_latency_stats()->set_total_time_exceeded(
time_diff_ms > FLAGS_control_period * 1e3);
ADEBUG << "control cycle time is: " << time_diff_ms << " ms.";
status.Save(control_command.mutable_header()->mutable_status());
// measure latency
if (local_view_.trajectory().header().has_lidar_timestamp()) {
static apollo::common::LatencyRecorder latency_recorder(
FLAGS_control_command_topic);
latency_recorder.AppendLatencyRecord(
local_view_.trajectory().header().lidar_timestamp(), start_time,
end_time);
}
// save current control command 保存当前控制命令
injector_->Set_pervious_control_command(&control_command);
injector_->previous_control_command_mutable()->CopyFrom(control_command);
injector_->previous_control_debug_mutable()->CopyFrom(
injector_->control_debug_info());
// 发布控制命令
control_cmd_writer_->Write(control_command);
return true;
}
// 检查输入
Status ControlComponent::CheckInput(LocalView *local_view) {
ADEBUG << "Received localization:"
<< local_view->localization().ShortDebugString();
ADEBUG << "Received chassis:" << local_view->chassis().ShortDebugString();
if (!local_view->trajectory().estop().is_estop() &&
local_view->trajectory().trajectory_point().empty()) {
AWARN_EVERY(100) << "planning has no trajectory point. ";
const std::string msg =
absl::StrCat("planning has no trajectory point. planning_seq_num:",
local_view->trajectory().header().sequence_num());
return Status(ErrorCode::CONTROL_COMPUTE_ERROR, msg);
}
for (auto &trajectory_point :
*local_view->mutable_trajectory()->mutable_trajectory_point()) {
if (std::abs(trajectory_point.v()) < FLAGS_minimum_speed_resolution &&
std::abs(trajectory_point.a()) < FLAGS_max_acceleration_when_stopped) {
trajectory_point.set_v(0.0);
trajectory_point.set_a(0.0);
}
}
injector_->vehicle_state()->Update(local_view->localization(),
local_view->chassis());
return Status::OK();
}
// 检查时间戳
Status ControlComponent::CheckTimestamp(const LocalView &local_view) {
if (!FLAGS_enable_input_timestamp_check || FLAGS_is_control_test_mode) {
ADEBUG << "Skip input timestamp check by gflags.";
return Status::OK();
}
double current_timestamp = Clock::NowInSeconds();
double localization_diff =
current_timestamp - local_view.localization().header().timestamp_sec();
if (localization_diff >
(FLAGS_max_localization_miss_num * FLAGS_localization_period)) {
AERROR << "Localization msg lost for " << std::setprecision(6)
<< localization_diff << "s";
monitor_logger_buffer_.ERROR("Localization msg lost");
return Status(ErrorCode::CONTROL_COMPUTE_ERROR, "Localization msg timeout");
}
double chassis_diff =
current_timestamp - local_view.chassis().header().timestamp_sec();
if (chassis_diff > (FLAGS_max_chassis_miss_num * FLAGS_chassis_period)) {
AERROR << "Chassis msg lost for " << std::setprecision(6) << chassis_diff
<< "s";
monitor_logger_buffer_.ERROR("Chassis msg lost");
return Status(ErrorCode::CONTROL_COMPUTE_ERROR, "Chassis msg timeout");
}
double trajectory_diff =
current_timestamp - local_view.trajectory().header().timestamp_sec();
if (trajectory_diff >
(FLAGS_max_planning_miss_num * FLAGS_trajectory_period)) {
AERROR << "Trajectory msg lost for " << std::setprecision(6)
<< trajectory_diff << "s";
monitor_logger_buffer_.ERROR("Trajectory msg lost");
return Status(ErrorCode::CONTROL_COMPUTE_ERROR, "Trajectory msg timeout");
}
return Status::OK();
}
// 重置控制命令
void ControlComponent::ResetAndProduceZeroControlCommand(
ControlCommand *control_command) {
control_command->set_throttle(0.0);
control_command->set_steering_target(0.0);
control_command->set_steering_rate(0.0);
control_command->set_speed(0.0);
control_command->set_brake(0.0);
control_command->set_gear_location(Chassis::GEAR_DRIVE);
control_task_agent_.Reset();
latest_trajectory_.mutable_trajectory_point()->Clear();
latest_trajectory_.mutable_path_point()->Clear();
trajectory_reader_->ClearData();
}
// 获得汽车的俯仰角
void ControlComponent::GetVehiclePitchAngle(ControlCommand *control_command) {
double vehicle_pitch = injector_->vehicle_state()->pitch() * 180 / M_PI;
control_command->mutable_debug()
->mutable_simple_lon_debug()
->set_vehicle_pitch(vehicle_pitch + FLAGS_pitch_offset_deg);
}
} // namespace control
} // namespace apollo
控制全局变量配置文件见control_gflags.cc
配置加载的控制器,Apollo中modules/control/control_component/conf/pipeline.pb.txt
controller {
name: "LAT_CONTROLLER"
type: "LatController"
}
controller {
name: "LON_CONTROLLER"
type: "LonController"
}
name是用户自定义,表达清楚是什么控制器就行,type是控制器的子类名称,如果和子类名称不一致,会导致加载控制器失败。上面是先加载横向控制器,再加载纵向控制器
3 Control组件包逻辑梳理
主要是梳理Init函数和Proc函数
Init函数:
主要实现ControlTaskAgent的初始化,以及control上游的相关消息的订阅
摘取Init函数里面的主要部分
bool ControlComponent::Init() {
// 初始化控制器agent
if (!FLAGS_is_control_ut_test_mode) {
if (!FLAGS_use_control_submodules &&
!control_task_agent_.Init(injector_, control_pipeline_).ok()) {
// set controller
ADEBUG << "original control";
monitor_logger_buffer_.ERROR(
"Control init controller failed! Stopping...");
return false;
}
}
// 订阅底盘信息
chassis_reader_ =
node_->CreateReader<Chassis>(chassis_reader_config, nullptr);
// 订阅轨迹信息
trajectory_reader_ =
node_->CreateReader<ADCTrajectory>(planning_reader_config, nullptr);
// 订阅规划命令状态
planning_command_status_reader_ =
node_->CreateReader<external_command::CommandStatus>(
planning_command_status_reader_config, nullptr);
// 订阅定位信息
localization_reader_ = node_->CreateReader<LocalizationEstimate>(
localization_reader_config, nullptr);
// 订阅pad消息
pad_msg_reader_ =
node_->CreateReader<PadMessage>(pad_msg_reader_config, nullptr);
}
Proc函数:
(1) 获取订阅消息的当前最新数据
(2) 检查订阅消息输入数据
(3) 检查订阅消息输入数据时间戳是否在容差范围内
(4) 更新车身姿态信息
(5) 进行control控制计算(调用ControlTaskAgent的ComputeControlCommand方法)
(6) 输出底盘控制指令
摘取Proc函数里面的主要部分
bool ControlComponent::Proc() {
// 获取订阅消息的当前最新数据
const auto &chassis_msg = chassis_reader_->GetLatestObserved();
const auto &trajectory_msg = trajectory_reader_->GetLatestObserved();
const auto &planning_status_msg =
planning_command_status_reader_->GetLatestObserved();
const auto &localization_msg = localization_reader_->GetLatestObserved();
const auto &pad_msg = pad_msg_reader_->GetLatestObserved();
// 检查订阅消息输入数据
// 检查订阅消息输入数据时间戳是否在容差范围内
// 自动驾驶模式
if (local_view_.chassis().driving_mode() ==
apollo::canbus::Chassis::COMPLETE_AUTO_DRIVE) {
// 计算控制命令
status = ProduceControlCommand(&control_command);
ADEBUG << "Produce control command normal.";
} else {
ADEBUG << "Into reset control command.";
ResetAndProduceZeroControlCommand(&control_command);
}
// 更新车身姿态信息
injector_->vehicle_state()->Update(local_view_.localization(),
local_view_.chassis());
// 发布控制命令
control_cmd_writer_->Write(control_command);
}
3 controller_task_base
之前的控制组件包讲解告一段落,如有疑惑可在评论区留言讨论
controller_task_base主要包含ControlTaskAgent和ControlTask定义,ControlTaskAgent用来管理ControlTask插件的加载和执行顺序,ControlTask是controller控制器插件的父类,Control/controller控制器插件都继承于ControlTask
control_task_agent.h:
#pragma once
#include <memory>
#include <vector>
#include "modules/common_msgs/control_msgs/control_cmd.pb.h"
#include "modules/common_msgs/planning_msgs/planning.pb.h"
#include "modules/control/control_component/proto/pipeline.pb.h"
#include "cyber/plugin_manager/plugin_manager.h"
#include "modules/common/util/factory.h"
#include "modules/control/control_component/controller_task_base/common/dependency_injector.h"
#include "modules/control/control_component/controller_task_base/control_task.h"
/**
* @namespace apollo::control
* @brief apollo::control
*/
namespace apollo {
namespace control {
/**
* @class ControlTaskAgent
*
* @brief manage all controllers declared in control config file.
*/
class ControlTaskAgent {
public:
/**
* @brief 初始化 ControlTaskAgent
* @param control_conf control configurations
* @return Status initialization status
*/
common::Status Init(std::shared_ptr<DependencyInjector> injector,
const ControlPipeline &control_pipeline);
/**
* @brief compute control command based on current vehicle status
* and target trajectory
* @param localization vehicle location
* @param chassis vehicle status e.g., speed, acceleration
* @param trajectory trajectory generated by planning
* @param cmd control command
* @return Status computation status
*/
// 基于当前车辆状态和目标轨迹计算控制命令
common::Status ComputeControlCommand(
const localization::LocalizationEstimate *localization,
const canbus::Chassis *chassis, const planning::ADCTrajectory *trajectory,
control::ControlCommand *cmd);
/**
* @brief reset ControlTaskAgent
* @return Status reset status
*/
// 重置ControlTaskAgent
common::Status Reset();
private:
std::vector<std::shared_ptr<ControlTask>> controller_list_;
std::shared_ptr<DependencyInjector> injector_ = nullptr;
};
} // namespace control
} // namespace apollo
control_task_agent.cc
#include "modules/control/control_component/controller_task_base/control_task_agent.h"
#include <utility>
#include "cyber/common/log.h"
#include "cyber/time/clock.h"
#include "modules/control/control_component/common/control_gflags.h"
namespace apollo {
namespace control {
using apollo::common::ErrorCode;
using apollo::common::Status;
using apollo::cyber::Clock;
using apollo::cyber::plugin_manager::PluginManager;
// 初始化控制器
Status ControlTaskAgent::Init(std::shared_ptr<DependencyInjector> injector,
const ControlPipeline &control_pipeline) {
if (control_pipeline.controller_size() == 0) {
AERROR << "control_pipeline is empty";
return Status(ErrorCode::CONTROL_INIT_ERROR, "Empty control_pipeline");
}
injector_ = injector;
for (int i = 0; i < control_pipeline.controller_size(); i++) {
auto controller = PluginManager::Instance()->CreateInstance<ControlTask>(
"apollo::control::" + control_pipeline.controller(i).type());
if (!controller->Init(injector_).ok()) {
AERROR << "Can not init controller " << controller->Name();
return Status(
ErrorCode::CONTROL_INIT_ERROR,
"Failed to init Controller:" + control_pipeline.controller(i).name());
}
controller_list_.push_back(controller);
AINFO << "Controller <" << controller->Name() << "> init done!";
}
return Status::OK();
}
// 计算控制命令
Status ControlTaskAgent::ComputeControlCommand(
const localization::LocalizationEstimate *localization,
const canbus::Chassis *chassis, const planning::ADCTrajectory *trajectory,
control::ControlCommand *cmd) {
for (auto &controller : controller_list_) {
ADEBUG << "controller:" << controller->Name() << " processing ...";
double start_timestamp = Clock::NowInSeconds();
// 计算控制命令 (核心)
controller->ComputeControlCommand(localization, chassis, trajectory, cmd);
double end_timestamp = Clock::NowInSeconds();
const double time_diff_ms = (end_timestamp - start_timestamp) * 1000;
ADEBUG << "controller: " << controller->Name()
<< " calculation time is: " << time_diff_ms << " ms.";
cmd->mutable_latency_stats()->add_controller_time_ms(time_diff_ms);
}
return Status::OK();
}
Status ControlTaskAgent::Reset() {
for (auto &controller : controller_list_) {
ADEBUG << "controller:" << controller->Name() << " reset...";
controller->Reset();
}
return Status::OK();
}
} // namespace control
} // namespace apollo
ControlTask是controller控制器插件的父类,Control/controller控制器插件都继承于ControlTask
control_task.h
/**
* @file
* @brief Defines the Controller base class.
*/
#pragma once
#include <memory>
#include <string>
#include <cxxabi.h>
#include "modules/common_msgs/control_msgs/control_cmd.pb.h"
#include "modules/common_msgs/localization_msgs/localization.pb.h"
#include "modules/common_msgs/planning_msgs/planning.pb.h"
#include "modules/control/control_component/proto/calibration_table.pb.h"
#include "cyber/common/file.h"
#include "cyber/plugin_manager/plugin_manager.h"
#include "modules/common/status/status.h"
#include "modules/control/control_component/common/control_gflags.h"
#include "modules/control/control_component/controller_task_base/common/dependency_injector.h"
namespace apollo {
namespace control {
class ControlTask {
public:
ControlTask() = default;
virtual ~ControlTask() = default;
/**
* @brief initialize Controller
* @param control_conf control configurations
* @return Status initialization status
*/
virtual common::Status Init(std::shared_ptr<DependencyInjector> injector) = 0;
/**
* @brief compute control command based on current vehicle status
* and target trajectory
* @param localization vehicle location
* @param chassis vehicle status e.g., speed, acceleration
* @param trajectory trajectory generated by planning
* @param cmd control command
* @return Status computation status
*/
virtual common::Status ComputeControlCommand(
const localization::LocalizationEstimate *localization,
const canbus::Chassis *chassis, const planning::ADCTrajectory *trajectory,
control::ControlCommand *cmd) = 0;
/**
* @brief reset Controller
* @return Status reset status
*/
virtual common::Status Reset() = 0;
/**
* @brief controller name
* @return string controller name in string
*/
virtual std::string Name() const = 0;
/**
* @brief stop controller
*/
virtual void Stop() = 0;
protected:
template <typename T>
bool LoadConfig(T *config);
// 加载油门制动标定表
bool LoadCalibrationTable(calibration_table *calibration_table_conf) {
std::string calibration_table_path = FLAGS_calibration_table_file;
if (!apollo::cyber::common::GetProtoFromFile(calibration_table_path,
calibration_table_conf)) {
AERROR << "Load calibration table failed!";
return false;
}
AINFO << "Load the calibraiton table file successfully, file path: "
<< calibration_table_path;
return true;
}
};
template <typename T>
bool ControlTask::LoadConfig(T *config) {
int status;
std::string class_name =
abi::__cxa_demangle(typeid(*this).name(), 0, 0, &status);
// Generate the default task config path from PluginManager.
std::string config_path_ =
apollo::cyber::plugin_manager::PluginManager::Instance()
->GetPluginConfPath<ControlTask>(class_name,
"conf/controller_conf.pb.txt");
if (!apollo::cyber::common::GetProtoFromFile(config_path_, config)) {
AERROR << "Load config of " << class_name << " failed!";
return false;
}
AINFO << "Load the [" << class_name
<< "] config file successfully, file path: " << config_path_;
return true;
}
} // namespace control
} // namespace apollo
4 controller
接下来看一下具体控制器的实现
具体控制器讲解见下一章节








![[沉迷理论]进制链表树](https://img-blog.csdnimg.cn/direct/f547d779e780446b87066bc00001d457.jpeg)