重要的内容写在前面:
- 该系列是以up主太极创客的零基础入门学用Arduino教程为基础制作的学习笔记。
- 个人把这个教程学完之后,整体感觉是很好的,如果有条件的可以先学习一些相关课程,学起来会更加轻松,相关课程有数字电路(强烈推荐先学数电,不然可能会有一些地方理解起来很困难)、模拟电路等,然后就是C++(注意C++是必学的)。
- 文章中的代码都是跟着老师边学边敲的,不过比起老师的版本我还把注释写得详细了些,并且个人认为重要的地方都有详细的分析。
- 一些函数的介绍有参考太极创客官网给出的中文翻译,为了便于现查现用,把个人认为重要的部分粘贴了过来并做了一些修改。
- 如有错漏欢迎指正。
视频链接:2-1 MeArm项目概述_哔哩哔哩_bilibili
太极创客官网:太极创客 – Arduino, ESP8266物联网的应用、开发和学习资料
一、伺服电机(舵机)
1、认识伺服电机
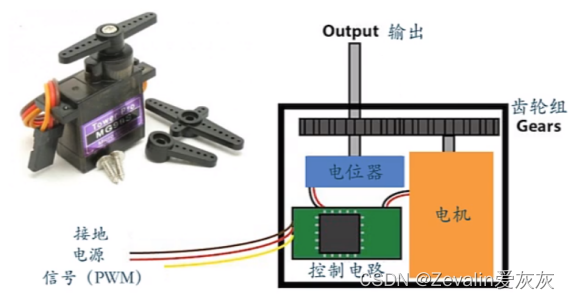
(1)伺服电机是一种根据输入PWM信号占空比来控制输出角度的装置(二者具体有什么对应关系取决于电机的型号),其硬件结构如下图所示,电位器与转轴相连,转轴每一个转动角度都分别对应电位器的一个旋转角度,控制电路负责将电位器部分传来的信号和输入的PWM信号作比对,如果当前转轴的转动角度不符合输入PWM信号占空比对应的输出角度,则控制电路将控制电机带动齿轮组旋转,直到转轴的旋转角度与输入的PWM信号相对应。
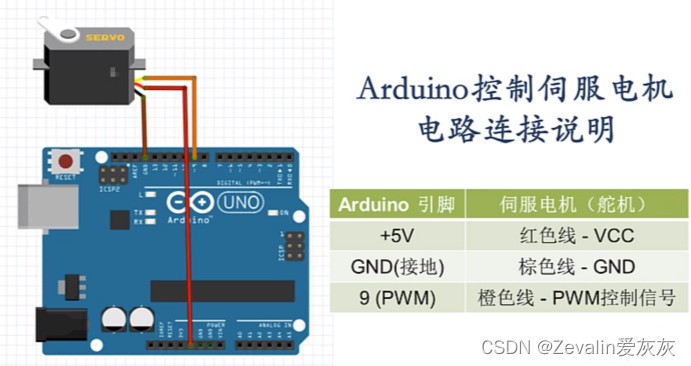
(2)舵机一般有三根引线需要连接,且引线的颜色一般有统一标准,如下所示,其中橙色线负责给电机输入PWM信号,它不一定必须连接在Arduino的9号引脚,只要带PWM输出的引脚都可以连接。
(3)通常舵机需要的供电功率比较高,如果需要控制1个以上的舵机,那么必须使用单独的电源为舵机供电,而不能使用Arduino开发板的+5V引脚为1个以上的舵机供电。另外,如果使用独立电源为舵机供电,那么独立电源与Arduino必须共地(电源GND与Arduino的GND相互连接在一起)。
2、Servo库概述
(1)通过Servo库可以用Arduino控制舵机(伺服电机)。常见的Arduino舵机有两种,一种舵机轴可以旋转180度,还有一种舵机轴可以连续旋转,这种舵机的旋转速度是可以控制的。
(2)Servo库允许大多数Arduino开发板(如Arduino Uno)同时控制12个舵机,对于Arduino Mega,可以用Servo库同时控制48个舵机。
(3)请注意:使用Servo库可能会影响Arduino开发板的某些引脚的PWM功能。
(4)对于除Mega开发板以外的Arduino开发板,当使用Servo库时,开发板的9号和10号引脚的PWM功能是无法使用的,也就是说,Arduino程序如果使用了Servo库,无论9号和10号引脚上是否连接了舵机,这两个引脚都不能使用analogWrite进行控制。
(5)对于Mega开发板,使用12个以下的舵机是不会影响开发板的PWM功能的,但如果使用12个以上的舵机,那么Mega开发板上的引脚11和引脚12是要受到影响的。
3、Servo库提供的函数
(1)servo.attach(pin):告知Arduino舵机的数据线连接在引脚pin上。
(2)servo.write(angle):对于标准舵机,write函数会将舵机轴旋转到角度angle相应的位置;对于连续旋转类型的舵机,write函数可以设置舵机的旋转速度(0指示舵机向着一个方向全速旋转,180指示舵机向着另一个方向全速旋转,90指示舵机静止不动,以此类推)。
(3)servo.read():获取当前舵机轴的角度(即上一次使用write()函数设置舵机轴的角度信息)。
(4)servo.attached():检查某一个舵机对象是否连接在开发板引脚上,如果某一个舵机对象的确连接在开发板上则返回true,否则返回false。
(5)servo.deattach():将舵机对象与Arduino开发板断开连接,舵机一旦与Arduino开发板断开连接,则引脚9和引脚10的PWM输出(analogWrite)功能将会恢复。
4、例——舵机自动旋转
(1)根据上图所示将电路连接好。
(2)将下面的程序下载到开发板中,会发现舵机进行重复的来回旋转。值得注意的是,C++采用面向对象的编程思想,Servo库的编写亦是如此,所以可以为Arduino控制的舵机分别创建Servo对象,通过Servo对象调用Servo类的成员函数以达到让对象(舵机)执行相应操作的效果。
#include <Servo.h> //包含Servo库的头文件
Servo myservo; //创建Servo对象用以控制伺服电机
int pos = 0; //存储伺服电机角度信息的变量
void setup()
{
myservo.attach(9); //Servo对象(其控制的电机)连接在9号引脚
Serial.begin(9600);
}
void loop()
{
for (pos = 0; pos < 180; pos += 45) //从0度转到180度,每一步旋转45度
{
myservo.write(pos); //舵机旋转轴旋转到'pos'变量的角度
Serial.println(pos);
delay(1500); //等待1.5秒以确保伺服电机可以达到目标角度
}
for (pos = 180; pos > 0; pos -= 45) //从180度转到0度,每一步旋转45度
{
myservo.write(pos); //舵机旋转轴旋转到'pos'变量的角度
Serial.println(pos);
delay(1500); //等待1.5秒以确保伺服电机可以达到目标角度
}
}

二、串口通讯
1、概述
(1)串行端口用于Arduino和个人电脑或其它设备进行通信(若没有特殊说明,所提及的串口通信双方均为Arduino与个人电脑),所有Arduino控制器都有至少一个串行端口(也称为UART或者USART)。
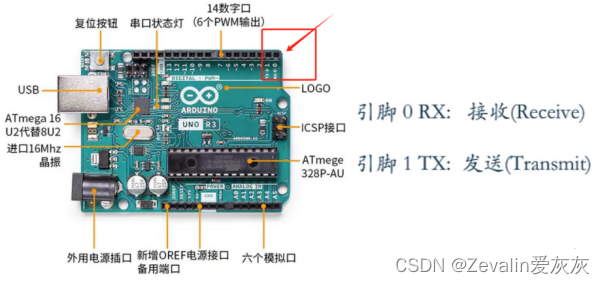
(2)个人电脑可以通过USB端口与Arduino的引脚0(RX)和引脚1(TX)进行通信,所以当Arduino的引脚0和引脚1用于串行通信功能时,Arduino的引脚0和引脚1是不能做其它工作的。引脚RX和引脚TX工作时,开发板上会有相应的两盏指示灯分别闪烁。
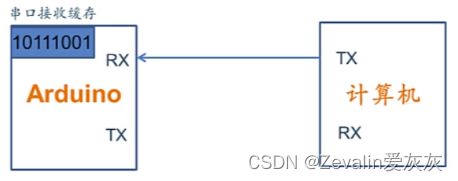
①开发板上的RX和TX如下图所示。
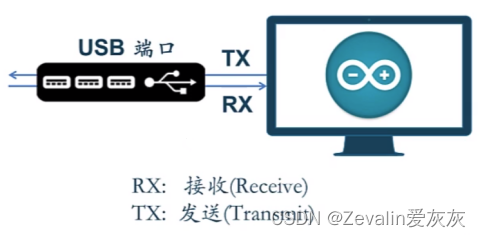
②电脑端的RX和TX如下图所示。
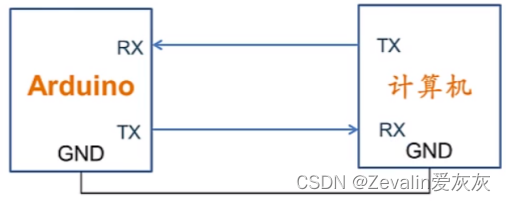
③Arduino和计算机的连接如下图所示,计算机可通过TX向Arduino发送以字节为单位的数据,Arduino可借助RX接收计算机发送来的数据,同理,Arduino可通过TX向计算机发送以字节为单位的数据,计算机可借助RX接收Arduino发送来的数据。
(3)串口通信中有一个概念是波特率,可认为是数据传输速率,通信双方的波特率应相同,否则无法正常通信。
(4)如果想深入了解串口通信的底层原理,可以参考课程《计算机网络》,虽然该课程不会详细介绍甚至不会介绍串口通信,但是通过对通信协议的学习,也有助于理解串口通信的原理。
2、例1——串行通讯基本演示
(1)本例仅用USB线将单片机和个人电脑连接即可。
(2)begin函数:
①该函数的作用是设置电脑与Arduino进行串口通讯时的数据传输速率(每秒传输字节数,也称波特率),可使用300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600或115200,也可以根据所使用的设备而设置其它传输速率。
②使用格式为“Serial.begin(speed)”,其中参数speed为传输速率。
(3)available函数:
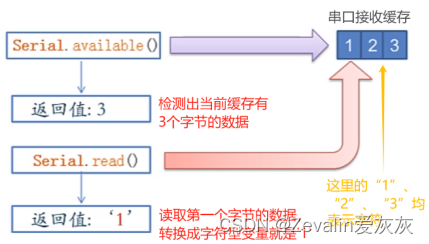
①当计算机给Arduino传输数据时,Arduino不一定能及时将该数据接收并处理,为了防止数据丢失,Arduino设置了串口接收缓存用于存放接收到的数据,当然,这个缓存不会很大,如果不及时将缓存中的数据读走,同样会造成数据丢失。另外,缓存中的字节数据是以ASCII码的形式存储的,比如字符’1’对应的ASCII码为49,转换为二进制就是00011001。
②available函数无函数参数,可用于检查设备是否接收到数据,该函数将会返回等待读取的数据字节数。
③available函数属于Stream类,该函数可被Stream类的子类所使用(Stream类的子类继承了Stream类的函数),如Serial、WiFiClient、File等,本例使用的是Serial.available(),用于检查串口接收缓存中是否有未处理的数据。
(4)read函数:
①read函数无参数,可用于从设备接收到数据中读取一个字节的数据,设备没有接收到数据时返回值为-1,设备接收到数据时返回值为接收到的数据流中的1个字符(先接收先读取,后接收后读取)。
②本函数属于Stream类,该函数可被Stream类的子类所使用,如Serial、WiFiClient、File等,本例使用的是Serial.read(),用于读取串口接收缓存中的数据。
③一个字节数据被读取走后,其在串口接收缓存中随之被移除。
(5)print函数:
①该函数的作用是以人类可读的ASCII码形式向串口发送数据,该函数有多种格式。
[1]Serial.print(val):val是要发送的数据,可以是任意数据类型。
[2]Serial.print(val, format):val是要发送的数据,可以是任意数据类型;format是指定数字的基数(用于整型数)或者小数的位数(用于浮点数),对于整数,这个允许的值为BIN(二进制)、OCT (八进制)、DEC(十进制)或HEX(十六进制),对于浮点数,该参数可以指定小数点的位数。
②整数的每一数位将以ASCII码形式发送;浮点数同样以ASCII码形式发送,默认保留小数点后两位;字节型数据将以单个字符形式发送;字符和字符串会以其相应的形式发送。
③该函数的返回值为发送的字节数,一般来说可以摒弃,即这个返回值没什么实际用途。
(6)println函数:
①该函数的作用是以人类可读的ASCII码形式向串口发送数据,与print函数极其类似,不同的是该函数会在数据发送完毕后发送一个换行符。
②该函数的返回值为发送的字节数,一般来说也可以摒弃,即这个返回值也没什么实际用途。
(7)将下面的程序下载到开发板中,然后开始人工调试。
void setup()
{
Serial.begin(9600);
Serial.println("Please input serial data.");
}
void loop()
{
if (Serial.available() > 0 ) //检查串口缓存中是否有数据等待读取
{
Serial.println("======================");
char serialData = Serial.read(); //读取串口缓存中等待的一个字符
Serial.print("Your serialData: '");
Serial.print(serialData); //发送刚刚读取到的字符给电脑
Serial.println("'");
Serial.print("serialData in DEC ");
Serial.println(serialData, DEC); //发送刚刚读取到字符的ASCII编码(十进制)
Serial.print("serialData in BIN ");
Serial.println(serialData, BIN); //发送刚刚读取到字符的ASCII编码(二进制)
Serial.print("serialData in OCT ");
Serial.println(serialData, OCT); //发送刚刚读取到字符的ASCII编码(八进制)
Serial.print("serialData in HEX ");
Serial.println(serialData, HEX); //发送刚刚读取到字符的ASCII编码(十六进制)
Serial.println("======================");
}
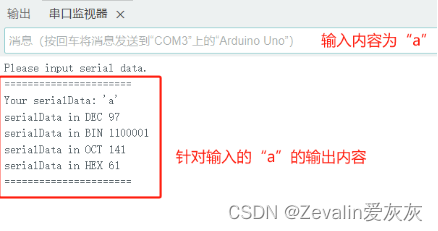
}①打开Arduino IDE的串口监视器,将内容“a”(结尾不带换行符)发送给Arduino,Arduino接收到数据后,Serial.available()的返回值为1,程序检测到缓存中有数据需要读取,然后进行读取操作,并将读取到的1字节数据以不同格式通过串口发送给电脑(同时附有提示信息)。
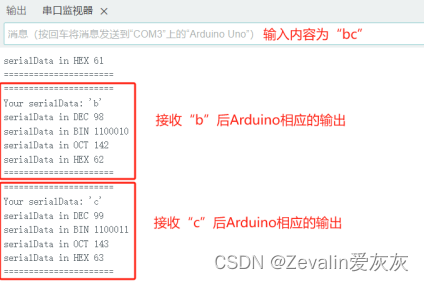
②打开Arduino IDE的串口监视器,将内容“bc”(结尾不带换行符)发送给Arduino,Arduino接收到数据后,Serial.available()的返回值为2,程序检测到缓存中有数据需要读取,然后进行读取操作,首先读取1字节数据——字符’b’并以不同格式通过串口发送给电脑(同时附有提示信息),再读取1字节数据——字符’c’并以不同格式通过串口发送给电脑(同时附有提示信息)。
3、例2——利用串行通讯控制一个舵机
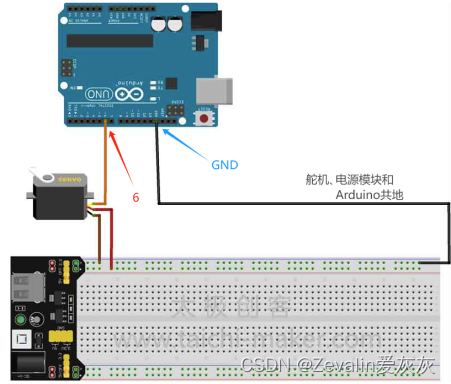
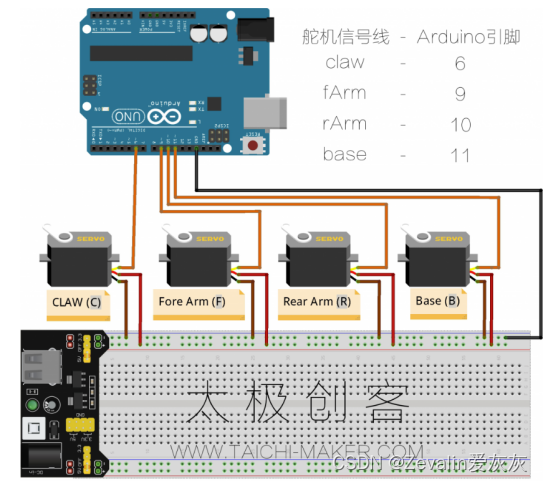
(1)按照下图所示将电路连接好,其中Arduino、舵机和电源模块需要共地,电源模块选择5V的输出,另外需要注意电源模块的正负极不能短接。
(2)parseInt函数:
①parseInt函数没有参数,可用于从设备接收到的数据中寻找整数值并将其返回,返回值类型为长整型(long int),若找不到整数数据则返回0。
②本函数属于Stream类,可被Stream类的子类所使用,本例使用的是Serial.parseInt()。
(3)parseFloat函数:
①parseFloat函数没有参数,可用于从设备接收到的数据中寻找浮点数值并将其返回,返回值类型为浮点型(float)。
②本函数属于Stream类,可被Stream类的子类所使用,本例不使用该函数。
(4)将下面的程序下载到开发板中,然后开始人工调试(示例程序没有限定输入数值的取值范围,在实际应用中应用if语句对Arduino接收到的数值进行越界判断后再做处理)。
#include <Servo.h>
Servo myServo; //为舵机创建Servo对象myServo
int dataIndex = 0; //创建整数型变量,存储输入数据序列号
void setup()
{
myServo.attach(6); //舵机连接在引脚6上
Serial.begin(9600); //启动串口通讯,配置传输波特率为9600
Serial.println("Please input serial data.");
}
void loop()
{
if ( Serial.available() > 0 ) // 检查串口缓存是否有数据等待传输
{ //处理数据序列号并通过串口监视器显示
dataIndex++;
Serial.print("dataIndex = ");
Serial.print(dataIndex);
Serial.print(" , ");
int pos = Serial.parseInt(); //解析串口数据中的整数信息并赋值给变量pos
Serial.print("Set servo position: ");
Serial.println(pos); //通过串口发送变量pos数值
myServo.write(pos); //使用pos变量数值设置伺服电机
delay(15);
}
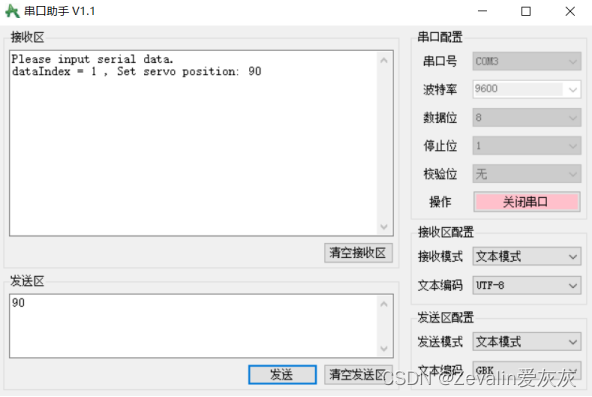
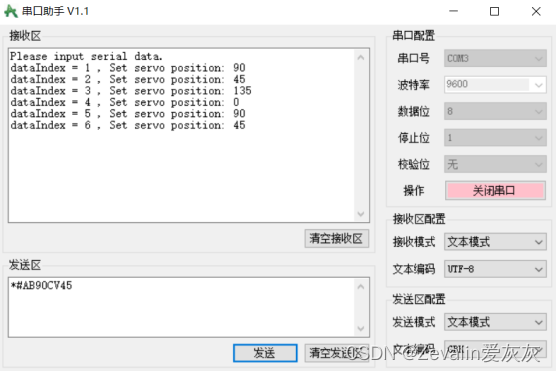
}①通过串口助手向Arduino发送内容“90”,程序检测到串口接收缓存有未处理数据后,调用parseInt函数对其中的数据进行处理,读取并分析出数据中的内容为整数90,接着Arduino通过串口将“90”发回给计算机,同时控制舵机旋转至90°的位置。
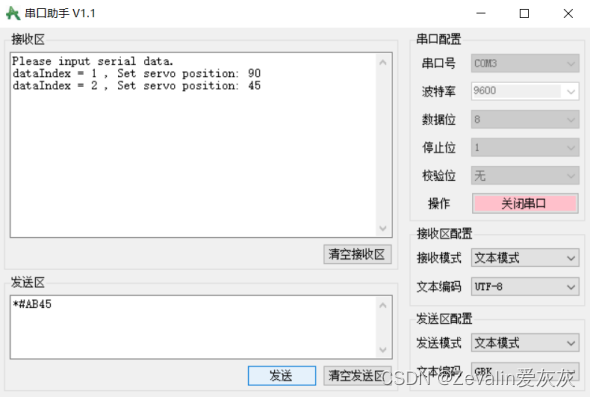
②通过串口助手向Arduino发送内容“*#AB45”,程序检测到串口接收缓存有未处理数据后,调用parseInt函数对其中的数据进行处理,读取并分析出数据中的内容含有整数45,接着Arduino通过串口将“45”发回给计算机,同时控制舵机旋转至45°的位置。
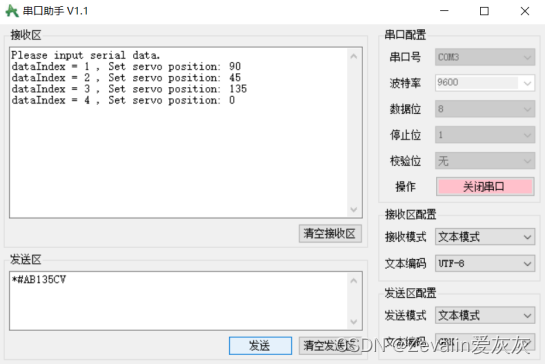
③通过串口助手向Arduino发送内容“*#AB135CV”,程序检测到串口接收缓存有未处理数据后,调用parseInt函数对其中的数据进行处理,读取并分析出数据中的内容含有整数135,“135”之前的字符全部省略,“135”之后的字符在本次parseInt函数的调用中不进行读取,这部分内容仍存储在缓存中,接着Arduino通过串口将“135”发回给计算机,同时控制舵机旋转至135°的位置,这时串口缓存中还有内容“CV”未处理,故程序再次调用parseInt函数对其中的数据进行处理,但在剩余内容“CV”中找不到整数数据,故返回0,Arduino通过串口将“0”发回给计算机,同时控制舵机旋转至0°的位置。
④通过串口助手向Arduino发送内容“*#AB90CV45”,程序检测到串口接收缓存有未处理数据后,调用parseInt函数对其中的数据进行处理,首先parseInt读取到整数数据“90”,“90”以后的数据不参与本次读取,Arduino控制舵机旋转至90°的位置,这时串口接收缓存中还有数据未处理,则程序再次调用parseInt函数,读取到整数数据“45”,Arduino控制舵机旋转至45°的位置。
4、例3——利用串行通讯控制四个舵机
(1)按照下图所示将电路连接好,其中Arduino、舵机和电源模块需要共地,电源模块选择5V的输出,另外需要注意电源模块的正负极不能短接。
(2)将下面的程序下载到开发板中,然后开始人工调试(示例程序没有限定输入数值的取值范围,在实际应用中应用if语句对Arduino接收到的数值进行越界判断后再做处理)。
#include <Servo.h>
Servo base, fArm, rArm, claw; //建立4个电机对象
void setup()
{
base.attach(11); //base伺服电机连接引脚11 电机代号为'b'
rArm.attach(10); //rArm伺服电机连接引脚10 电机代号为'r'
fArm.attach(9); //fArm伺服电机连接引脚9 电机代号为'f'
claw.attach(6); //claw伺服电机连接引脚6 电机代号为'c'
Serial.begin(9600);
Serial.println("Please input serial data.");
}
void loop()
{
if (Serial.available()) //检查串口缓存是否有数据等待传输
{
char servoName = Serial.read(); //获取电机指令中电机编号信息
Serial.print("servoName = ");
Serial.print(servoName);
Serial.print(" , ");
int data = Serial.parseInt(); //获取电机指令中电机角度信息
switch(servoName) //根据电机指令中电机信息决定对哪一个电机进行角度设置
{
case 'b': //电机编号为b,设置base电机的角度
base.write(data); Serial.print("Set base servo value: ");
Serial.println(data); break;
case 'r': //电机编号为r,设置rArm电机的角度
rArm.write(data); Serial.print("Set rArm servo value: ");
Serial.println(data); break;
case 'f': //电机编号为f,设置fArm电机的角度
fArm.write(data); Serial.print("Set fArm servo value: ");
Serial.println(data); break;
case 'c': //电机编号为c,设置claw电机的角度
claw.write(data); Serial.print("Set claw servo value: ");
Serial.println(data); break;
}
}
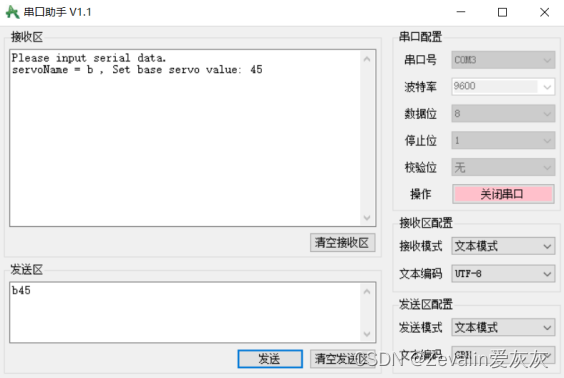
}①通过串口助手向Arduino发送内容“b45”,程序检测到缓存中有未处理数据,遂进行处理,首先获取第一个字节,其ASCII码对应的字符’b’为电机编号,接着从后续数据中获取到整数数据“45”,经过switch语句的逻辑控制将编号为“b”的电机控制旋转至45°。
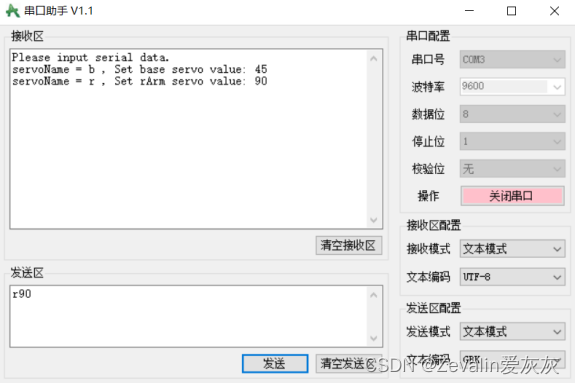
②通过串口助手向Arduino发送内容“r90”,程序检测到缓存中有未处理数据,遂进行处理,首先获取第一个字节,其ASCII码对应的字符’r’为电机编号,接着从后续数据中获取到整数数据“90”,经过switch语句的逻辑控制将编号为“r”的电机控制旋转至90°。
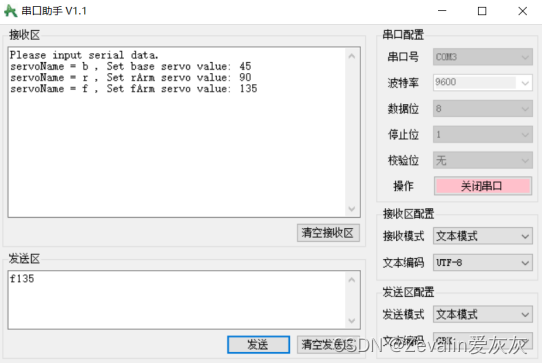
③通过串口助手向Arduino发送内容“f135”,程序检测到缓存中有未处理数据,遂进行处理,首先获取第一个字节,其ASCII码对应的字符’f’为电机编号,接着从后续数据中获取到整数数据“135”,经过switch语句的逻辑控制将编号为“f”的电机控制旋转至135°。
④通过串口助手向Arduino发送内容“c180”,程序检测到缓存中有未处理数据,遂进行处理,首先获取第一个字节,其ASCII码对应的字符’c’为电机编号,接着从后续数据中获取到整数数据“180”,经过switch语句的逻辑控制将编号为“c”的电机控制旋转至180°。

⑤如果发送一个非法的电机编号(比如“a”),四个舵机均不会有任何响应,因为switch语句中没有实现对这种异常情况进行处理。
5、更多Serial(串行通信)函数
(1)Serial.end():终止串行通讯,让RX和TX引脚用于Arduino的输入(INPUT)或输出(OUTPUT)功能。(可调用Serial.begin()重新打开串行通讯)
(2)Serial.find(target):可用于从设备接收到的数据中寻找指定字符串信息,target为被查找字符串,允许使用String或char类型,当函数找到了指定字符串信息后将会立即结束函数执行并且返回“真”,否则将会返回“假”。
(3)Serial.findUntil(target, terminator):可用于从设备接收到的数据中寻找指定字符串信息,当函数找到了指定字符串信息后将会立即结束函数执行并且返回“真”,否则将会返回“假”。
①该函数在满足以下任一条件后都会停止函数执行:读取到指定终止字符串、找到了指定字符串信息、达到设定时间(可使用setTimeout来设置)。
②target是被查找字符串,允许使用String或char类型;terminator是终止字符串,用于设置终止函数执行的字符串信息,设备在读取数据时一旦读取到此终止字符串,将会结束函数执行并返回。
(4)Serial.flush():让开发板在所有待发数据发送完毕前,保持等待状态。
(5)Serial.peek():从设备接收到的数据中读取一个字节的数据,设备没有接收到数据时返回值为-1,设备接收到数据时返回值为接收到的数据流中的第1个字符;与read函数不同的是,使用peek函数读取数据后,被读取的数据不会从数据流中消除。
(6)Serial.readBytes(buffer, length):用于从设备接收的数据中读取信息,读取到的数据信息将存放在缓存变量中。
①该函数在读取到指定字节数的信息或者达到设定时间(该设定时间可使用setTimeout来设置)后都会停止函数执行并返回。
②buffer是缓存变量/数组,用于存储读取到的信息,允许使用char或者byte类型的变量或数组;length是读取字节的数量,readBytes函数在读取到length所指定的字节数量后就会停止运行,允许使用int类型。
(7)Serial.readBytesUntil(character, buffer, length):用于从设备接收到数据中读取信息,读取到的数据信息将存放在缓存变量中。
①该函数在满足以下任一条件后都会停止函数执行并且返回:读取到指定终止字符、读取到指定字节数的信息、达到设定时间(可使用setTimeout来设置)。
②当函数读取到终止字符后,会立即停止函数执行,此时buffer(缓存变量/数组)中所存储的信息为设备读取到终止字符前的字符内容。
③character是终止字符,用于设置终止函数执行的字符信息,允许使用char类型;buffer是缓存变量/数组,用于存储读取到的信息,允许使用char或者byte类型的变量或数组;length是读取字节数量,readBytes函数在读取到length所指定的字节数量后就会停止运行,允许使用int类型。
(8)Serial.write有两种形式:
①Serial.write(val):将字节数据val通过串口发送,val可以是一个字节数据,也可以是由一系列字节数据组成的字符串。
②Serial.write(buf, len):将同一系列字节组成的数组buf通过串口发送,len为数组长度。
(9)Serial.readString():用于从设备接收到数据中读取数据信息,读取到的信息将以字符串格式返回。
(10)Serial.readStringUntil(terminator):用于从设备接收到的数据中读取信息,读取到的数据信息将以字符串形式返回,该函数在读取到指定终止字符terminator或达到设定时间(可使用setTimeout来设置)时都会停止函数执行并返回。